|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
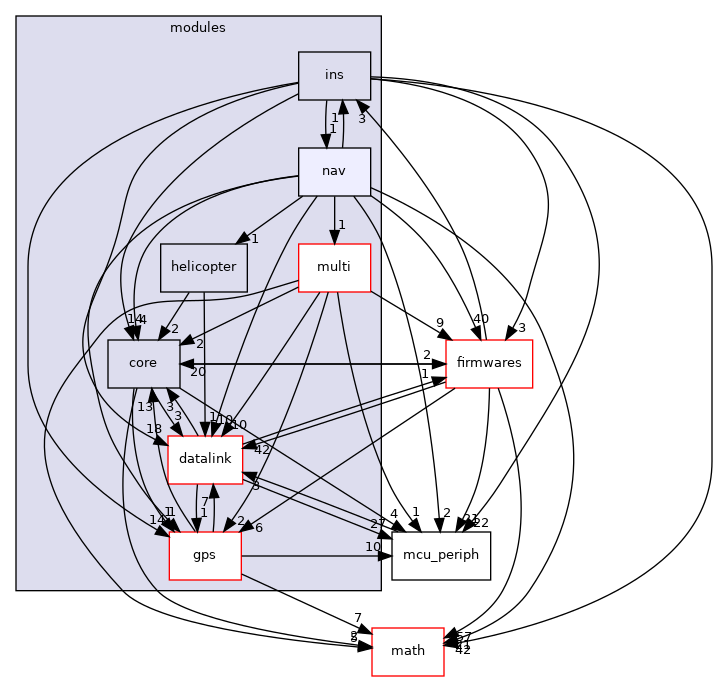
 Directory dependency graph for nav:
Directory dependency graph for nav:Files | |
| ballistic_touchdown.c | |
| ballistic_touchdown.h | |
| common_flight_plan.c | |
| Common flight_plan functions shared between fixedwing and rotorcraft. | |
| common_flight_plan.h | |
| Common flight_plan functions shared between fixedwing and rotorcraft. | |
| common_nav.c | |
| common_nav.h | |
| ground_detect.c | |
| Ground detection module. | |
| ground_detect.h | |
| nav_airspeed.c | |
| nav_airspeed.h | |
| NAV Tunable standard airspeed settings to be called from the flight plan. | |
| nav_base.h | |
| nav_bungee_takeoff.c | |
| Takeoff functions for bungee takeoff. | |
| nav_bungee_takeoff.h | |
| Takeoff functions for bungee takeoff. | |
| nav_catapult.c | |
| nav_catapult.h | |
| catapult launch timing system | |
| nav_cube.c | |
| Fixedwing Navigation in a cube towards a center. | |
| nav_cube.h | |
| Fixedwing Navigation in a cube towards a center. | |
| nav_drop.c | |
| Navigation module to drop a ball at a given point taking into account the wind and ground speed. | |
| nav_drop.h | |
| Navigation module to drop a ball at a given point taking into account the wind and ground speed. | |
| nav_fish.c | |
| nav_fish.h | |
| nav_flower.c | |
| from OSAM advanced navigation routines | |
| nav_flower.h | |
| nav_geofence.h | |
| Optional exceptions triggeringg HOME_MODE 1) GEOFENCE_DATALINK_LOST_TIME: go to HOME mode if datalink lost for GEOFENCE_DATALINK_LOST_TIME 2) GEOFENCE_MAX_ALTITUDE: go HOME if airplane higher than the max altitude 3) GEOFENCE_MAX_HEIGHT: go HOME if airplane higher than the max height. | |
| nav_gls.c | |
| gps landing system | |
| nav_gls.h | |
| gps landing system | |
| nav_heli_spinup.c | |
| nav_heli_spinup.h | |
| nav_lace.c | |
| nav_lace.h | |
| Adaptive border pattern for cloud exploration Can be used in mission mode with custom pattern and ID "LACE". | |
| nav_launcher.c | |
| Pneumatic launcher system See video of the system: https://www.youtube.com/watch?v=qc1uwH-8Dbw Launcher. | |
| nav_launcher.h | |
| Pneumatic launcher system See video of the system: https://www.youtube.com/watch?v=qc1uwH-8Dbw Launcher. | |
| nav_line.c | |
| Fixedwing navigation along a line with nice U-turns. | |
| nav_line.h | |
| Fixedwing navigation along a line with nice U-turns. | |
| nav_line_border.c | |
| navigate along a border line (line 1-2) with turns in the same direction | |
| nav_line_border.h | |
| navigate along a border line (line 1-2) with turns in the same direction | |
| nav_line_osam.c | |
| Flight line from OSAM advanced navigation routines. | |
| nav_line_osam.h | |
| nav_poles.c | |
| nav_poles.h | |
| nav_poles_rotorcraft.c | |
| Turn around 2 points, with possible margins Can be used in mission mode. | |
| nav_poles_rotorcraft.h | |
| Turn around 2 points, with possible margins Can be used in mission mode. | |
| nav_rosette.c | |
| Adaptive flower pattern for cloud exploration. | |
| nav_rosette.h | |
| Adaptive flower pattern for cloud exploration Can be used in mission mode with custom pattern and ID "RSTT". | |
| nav_rotorcraft_base.c | |
| nav_rotorcraft_base.h | |
| nav_rotorcraft_hybrid.c | |
| Specific navigation functions for hybrid aircraft. | |
| nav_rotorcraft_hybrid.h | |
| Specific navigation functions for hybrid aircraft. | |
| nav_rover_base.c | |
| nav_rover_base.h | |
| nav_shakestart.c | |
| nav_shakestart.h | |
| nav_skid_landing.c | |
| Landing on skidpads See video of the landing: https://www.youtube.com/watch?v=aYrB7s3oeX4 Standard landing procedure: 1) circle down passing AF waypoint (from left or right) 2) once low enough follow line to TD waypoint 3) once low enough flare. | |
| nav_skid_landing.h | |
| Landing on skidpads See video of the landing: https://www.youtube.com/watch?v=aYrB7s3oeX4 Standard landing procedure: 1) circle down passing AF waypoint (from left or right) 2) once low enough follow line to TD waypoint 3) once low enough flare. | |
| nav_smooth.c | |
| Smooth navigation to wp_a along an arc (around wp_cd), a segment (from wp_rd to wp_ta) and a second arc (around wp_ca). | |
| nav_smooth.h | |
| Smooth navigation to wp_a along an arc (around wp_cd), a segment (from wp_rd to wp_ta) and a second arc (around wp_ca). | |
| nav_spiral.c | |
| Fixedwing navigation in a spiral/helix. | |
| nav_spiral.h | |
| Fixedwing navigation in a spiral/helix. | |
| nav_spiral_3D.c | |
| Fixedwing navigation in a 3D spiral. | |
| nav_spiral_3D.h | |
| Fixedwing navigation in a 3D spiral. | |
| nav_survey_disc.c | |
| nav_survey_disc.h | |
| nav_survey_hybrid.c | |
| This routine will cover the enitre area of any Polygon defined in the flightplan which is a convex polygon. | |
| nav_survey_hybrid.h | |
| nav_survey_poly_osam.c | |
| nav_survey_poly_osam.h | |
| nav_survey_poly_rotorcraft.c | |
| nav_survey_poly_rotorcraft.h | |
| nav_survey_polygon.c | |
| Advanced polygon survey for fixedwings from Uni Stuttgart. | |
| nav_survey_polygon.h | |
| Advanced polygon survey for fixedwings from Uni Stuttgart. | |
| nav_survey_rectangle.c | |
| Automatic survey of a rectangle for fixedwings. | |
| nav_survey_rectangle.h | |
| nav_survey_rectangle_rotorcraft.c | |
| Automatic survey of a rectangle for rotorcraft. | |
| nav_survey_rectangle_rotorcraft.h | |
| Automatic survey of a rectangle for rotorcraft. | |
| nav_survey_zamboni.c | |
| Zamboni pattern survey for fixedwings. | |
| nav_survey_zamboni.h | |
| Zamboni pattern survey for fixedwings. | |
| nav_takeoff_and_landing.h | |
| nav_takeoff_and_landing_fw.c | |
| nav_takeoff_and_landing_rotorcraft.c | |
| nav_trinity.c | |
| nav_trinity.h | |
| nav_vertical_raster.c | |
| from OSAM advanced navigation routines | |
| nav_vertical_raster.h | |
| takeoff_detect.c | |
| Automatic takeoff assistance for fixed-wing. | |
| takeoff_detect.h | |
| Automatic takeoff assistance for fixed-wing. | |
| waypoints.c | |
| waypoints.h | |