|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
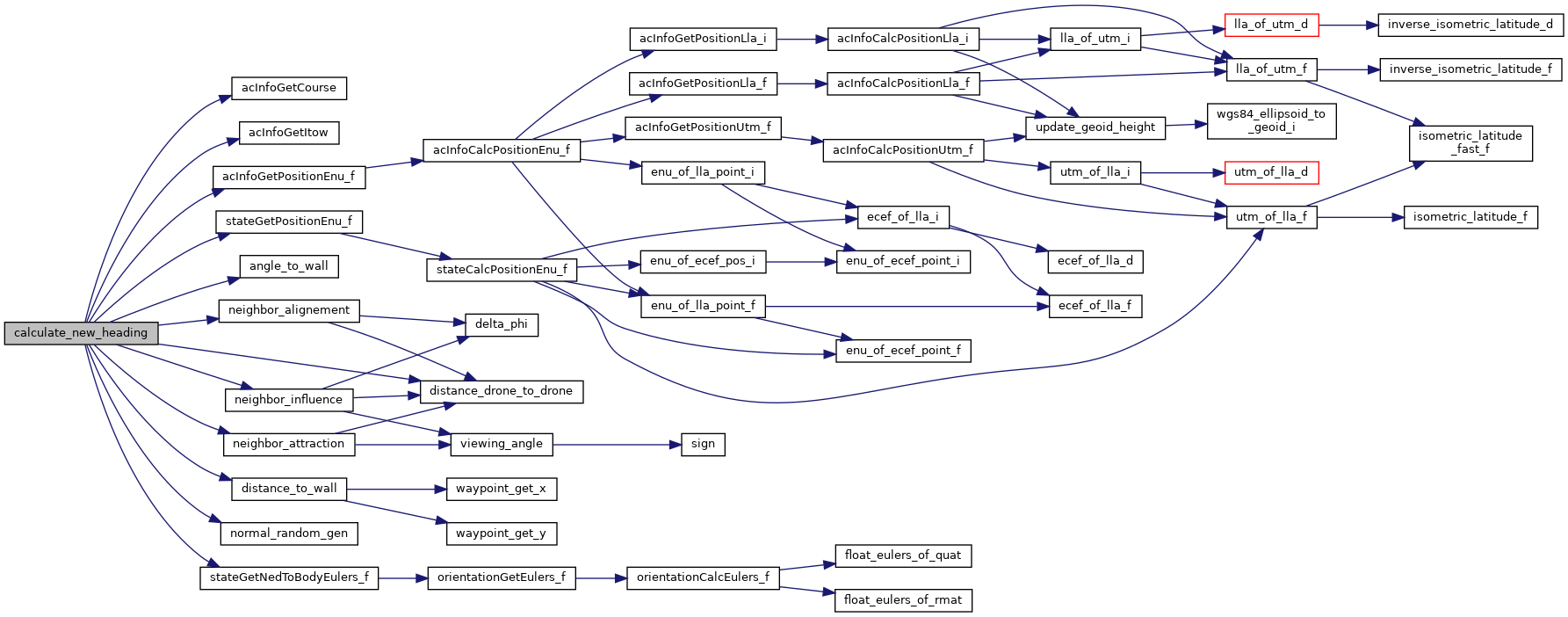
#include "modules/nav/nav_fish.h"#include "modules/multi/traffic_info.h"#include "firmwares/rotorcraft/navigation.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "state.h"#include "autopilot.h"#include "autopilot_guided.h"#include "modules/nav/waypoints.h"#include "math/pprz_geodetic_float.h"#include "generated/flight_plan.h"#include <math.h>#include "modules/datalink/telemetry.h"#include <stdio.h>#include <stdlib.h> Include dependency graph for nav_fish.c:
Include dependency graph for nav_fish.c:Go to the source code of this file.
Data Structures | |
| struct | NavFish |
Macros | |
| #define | NAV_FISH_BODY_LENGTH 0.5f |
| Default parameters. | |
| #define | NAV_FISH_MAXVELOCITY 0.5f |
| #define | NAV_FISH_MINVELOCITY 0.1f |
| #define | NAV_FISH_MIND2D 1.f |
| #define | NAV_FISH_FLUCT 0.1f |
| #define | NAV_FISH_EW1 0.7f |
| #define | NAV_FISH_EW2 0.f |
| #define | NAV_FISH_ALPHA 0.6f |
| #define | NAV_FISH_YW 0.8f |
| #define | NAV_FISH_LW (2.5f*NAV_FISH_BODY_LENGTH) |
| #define | NAV_FISH_ALPHA_REP 1.f |
| #define | NAV_FISH_YATT 0.4f |
| #define | NAV_FISH_LATT 3.f |
| #define | NAV_FISH_D0ATT 1.5f |
| #define | NAV_FISH_YALI 0.15f |
| #define | NAV_FISH_LALI 3.f |
| #define | NAV_FISH_D0ALI 1.f |
| #define | NAV_FISH_ALT 2.0f |
| #define | NAV_FISH_WALL_DISTANCE 10.f |
| #define | NAV_FISH_STRATEGY 0 |
| #define | NAV_FISH_TRYATT 0.2f |
| #define | NAV_FISH_TRLATT 3.f |
| #define | NAV_FISH_TRYALI 0.25f |
| #define | NAV_FISH_TRLALI 2.f |
| #define | nfp nav_fish_params |
| #define | PRESCALE 16 |
Functions | |
| void | nav_fish_init (void) |
| initialization of parameters and state variables | |
| static void | send_swarm_message (void) |
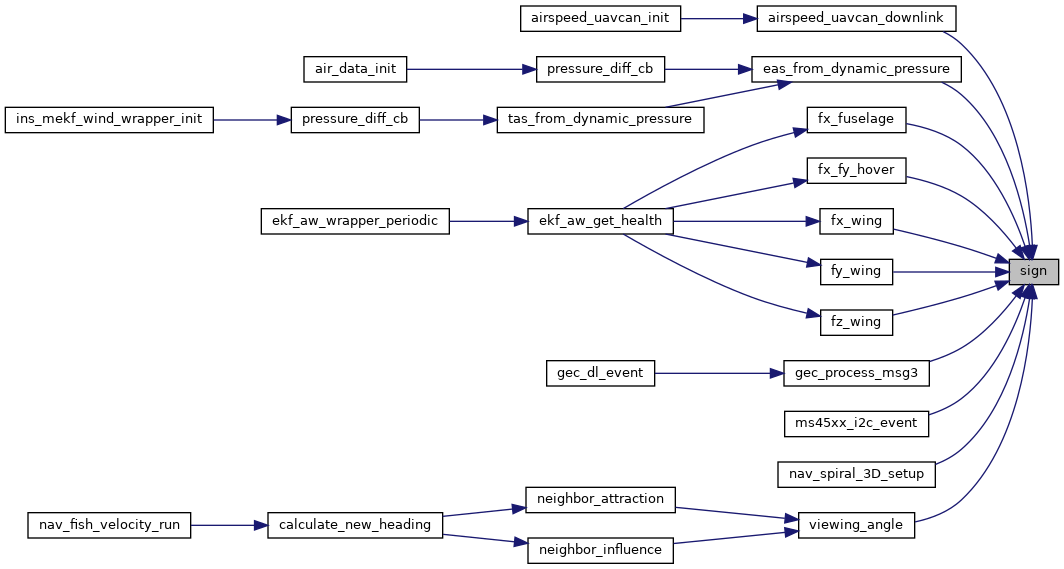
| static float | sign (float x) |
| sign function | |
| static float | normal_random_gen (void) |
| Gaussian random number generator with mean =0 and invariance =1 using Box-Muller method. | |
| static float | distance_to_wall (struct EnuCoor_f *pos) |
| Calculates distance between the uav and wall. | |
| static float | angle_to_wall (struct EnuCoor_f *pos, float psi) |
| calculates the relative orientation too the wall | |
| static float | distance_drone_to_drone (struct EnuCoor_f *pos, struct EnuCoor_f *other) |
| calculates the distance between two uavs | |
| static float | viewing_angle (struct EnuCoor_f *pos, struct EnuCoor_f *other, float psi) |
| calculates a uav's viewing angle on another uav | |
| static float | delta_phi (float psi, float psi_other) |
| calculates difference between two headings | |
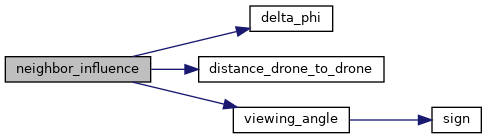
| static float | neighbor_influence (struct EnuCoor_f *pos, struct EnuCoor_f *other, float psi, float psi_other) |
| calculates the influence of a uav on a neighbor of his | |
| static float | neighbor_attraction (struct EnuCoor_f *pos, struct EnuCoor_f *other, float psi) |
| calculates the attraction effect between two uavs | |
| static float | neighbor_alignement (struct EnuCoor_f *pos, struct EnuCoor_f *other, float psi, float psi_other) |
| calculates the alignement effect between two uavs | |
| static float | calculate_new_heading (void) |
| calculates new variation of the heading for the uav based on current state | |
| bool | nav_fish_velocity_run (void) |
| runs the uav according to fish movement model using velocity control | |
Variables | |
| static float | distance_wall = NAV_FISH_WALL_DISTANCE |
| struct NavFishParams | nav_fish_params |
| struct NavFish | nav_fish |
| struct NavFish |
Definition at line 158 of file nav_fish.c.
| Data Fields | ||
|---|---|---|
| float | f_ali | alignement effect |
| float | f_att | attraction effect |
| float | f_fluct | fluctuation effect |
| float | f_w | intensity of wall effect |
| float | f_wall | wall effect |
| float | heading | heading command |
| float | r_w | distance to wall |
| float | step_size | step size |
| float | theta_w | angle to wall |
| float | velocity | current velocity |
Definition at line 85 of file nav_fish.c.
Definition at line 97 of file nav_fish.c.
| #define NAV_FISH_ALT 2.0f |
Definition at line 125 of file nav_fish.c.
Default parameters.
Definition at line 57 of file nav_fish.c.
Definition at line 121 of file nav_fish.c.
Definition at line 109 of file nav_fish.c.
Definition at line 77 of file nav_fish.c.
Definition at line 81 of file nav_fish.c.
Definition at line 73 of file nav_fish.c.
Definition at line 117 of file nav_fish.c.
Definition at line 105 of file nav_fish.c.
| #define NAV_FISH_LW (2.5f*NAV_FISH_BODY_LENGTH) |
Definition at line 93 of file nav_fish.c.
Definition at line 61 of file nav_fish.c.
Definition at line 69 of file nav_fish.c.
Definition at line 65 of file nav_fish.c.
| #define NAV_FISH_STRATEGY 0 |
Definition at line 133 of file nav_fish.c.
Definition at line 149 of file nav_fish.c.
Definition at line 141 of file nav_fish.c.
Definition at line 145 of file nav_fish.c.
Definition at line 137 of file nav_fish.c.
Definition at line 129 of file nav_fish.c.
Definition at line 113 of file nav_fish.c.
Definition at line 101 of file nav_fish.c.
Definition at line 89 of file nav_fish.c.
| #define nfp nav_fish_params |
Definition at line 155 of file nav_fish.c.
| #define PRESCALE 16 |
Definition at line 483 of file nav_fish.c.
calculates the relative orientation too the wall
| pos | ENU coordinates |
| psi | angle from north clockwise |
Definition at line 273 of file nav_fish.c.
References dir, FLOAT_ANGLE_NORMALIZE, foo, EnuCoor_f::x, and EnuCoor_f::y.
Referenced by calculate_new_heading().
Here is the caller graph for this function:calculates new variation of the heading for the uav based on current state
Definition at line 403 of file nav_fish.c.
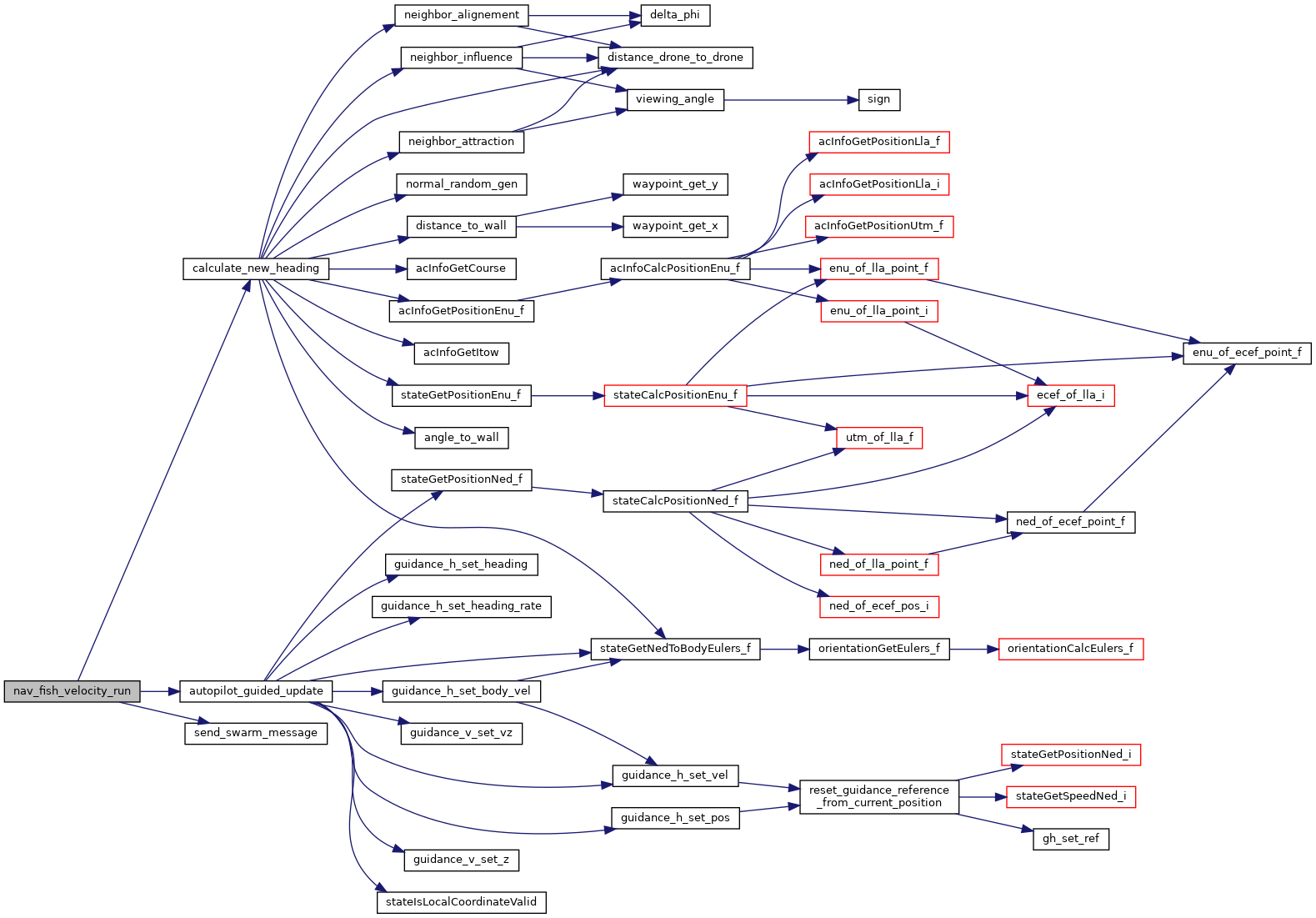
References acInfo::ac_id, acInfoGetCourse(), acInfoGetItow(), acInfoGetPositionEnu_f(), angle_to_wall(), distance_drone_to_drone(), distance_to_wall(), NavFish::f_ali, NavFish::f_att, NavFish::f_fluct, NavFish::f_w, NavFish::f_wall, foo, gps, nav_fish, NB_ACS, neighbor_alignement(), neighbor_attraction(), neighbor_influence(), nfp, normal_random_gen(), FloatEulers::psi, NavFish::r_w, stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), NavFish::step_size, NavFish::theta_w, ti_acs, and GpsState::tow.
Referenced by nav_fish_velocity_run().
Here is the call graph for this function: Here is the caller graph for this function:calculates difference between two headings
| psi | first heading |
| psi_other | second heading |
Definition at line 319 of file nav_fish.c.
References FLOAT_ANGLE_NORMALIZE, and foo.
Referenced by neighbor_alignement(), and neighbor_influence().
Here is the caller graph for this function:calculates the distance between two uavs
| pos | ENU coordinates of the first drone |
| other | ENU coordinates of the second drone |
Definition at line 288 of file nav_fish.c.
References foo, VECT2_NORM2, and VECT3_DIFF.
Referenced by calculate_new_heading(), neighbor_alignement(), neighbor_attraction(), and neighbor_influence().
Here is the caller graph for this function:Calculates distance between the uav and wall.
| pos | ENU coordinates |
Definition at line 256 of file nav_fish.c.
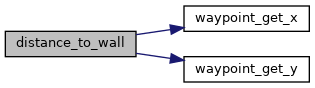
References distance_wall, foo, waypoint_get_x(), waypoint_get_y(), EnuCoor_f::x, and EnuCoor_f::y.
Referenced by calculate_new_heading().
Here is the call graph for this function: Here is the caller graph for this function:initialization of parameters and state variables
nav fish init
Definition at line 175 of file nav_fish.c.
References NavFishParams::alpha, NavFishParams::alpha_rep, NavFishParams::alt, NavFishParams::d0_ali, NavFishParams::d0_att, NavFishParams::e_w1, NavFishParams::e_w2, NavFish::f_ali, NavFish::f_att, NavFish::f_fluct, NavFish::f_w, NavFish::f_wall, NavFishParams::fluct, NavFish::heading, NavFishParams::l_ali, NavFishParams::l_att, NavFishParams::l_w, NavFishParams::max_velocity, NavFishParams::min_d2d, NavFishParams::min_velocity, nav_fish, NAV_FISH_ALPHA, NAV_FISH_ALPHA_REP, NAV_FISH_ALT, NAV_FISH_BODY_LENGTH, NAV_FISH_D0ALI, NAV_FISH_D0ATT, NAV_FISH_EW1, NAV_FISH_EW2, NAV_FISH_FLUCT, NAV_FISH_LALI, NAV_FISH_LATT, NAV_FISH_LW, NAV_FISH_MAXVELOCITY, NAV_FISH_MIND2D, NAV_FISH_MINVELOCITY, nav_fish_params, NAV_FISH_STRATEGY, NAV_FISH_TRLALI, NAV_FISH_TRLATT, NAV_FISH_TRYALI, NAV_FISH_TRYATT, NAV_FISH_YALI, NAV_FISH_YATT, NAV_FISH_YW, NavFish::r_w, NavFish::step_size, NavFishParams::strategy, NavFish::theta_w, NavFishParams::tr_l_ali, NavFishParams::tr_l_att, NavFishParams::tr_y_ali, NavFishParams::tr_y_att, NavFish::velocity, NavFishParams::y_ali, NavFishParams::y_att, and NavFishParams::y_w.
runs the uav according to fish movement model using velocity control
nav fish velocity run
Definition at line 487 of file nav_fish.c.
References autopilot_guided_update(), calculate_new_heading(), counter, NavFish::f_w, FLOAT_ANGLE_NORMALIZE, foo, GUIDED_FLAG_XY_BODY, GUIDED_FLAG_XY_VEL, NavFish::heading, nav_fish, new_heading, nfp, PRESCALE, send_swarm_message(), and NavFish::velocity.
Here is the call graph for this function:
|
static |
calculates the alignement effect between two uavs
| pos | ENU coordinates of the current uav |
| other | ENU coordinates of the neighbor uav |
| psi | heading of the current uav |
| psi_other | heading of the neighbor uav |
Definition at line 383 of file nav_fish.c.
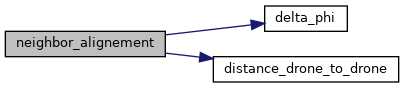
References delta_phi(), distance_drone_to_drone(), foo, and nfp.
Referenced by calculate_new_heading().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
calculates the attraction effect between two uavs
| pos | ENU coordinates of the current uav |
| other | ENU coordinates of the neighbor uav |
| psi | heading of the current uav |
Definition at line 355 of file nav_fish.c.
References distance_drone_to_drone(), foo, nav_fish, nfp, NavFish::velocity, and viewing_angle().
Referenced by calculate_new_heading().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
calculates the influence of a uav on a neighbor of his
| pos | ENU coordinates of the influenced uav |
| other | ENU coordinates of the influencing uav |
| psi | heading of the influenced uav |
| psi_other | heading of the influencing uav |
Definition at line 333 of file nav_fish.c.
References delta_phi(), distance_drone_to_drone(), foo, nfp, and viewing_angle().
Referenced by calculate_new_heading().
Here is the call graph for this function: Here is the caller graph for this function:Gaussian random number generator with mean =0 and invariance =1 using Box-Muller method.
Definition at line 244 of file nav_fish.c.
References foo.
Referenced by calculate_new_heading().
Here is the caller graph for this function:Definition at line 213 of file nav_fish.c.
References DefaultChannel, DefaultDevice, NavFish::f_ali, NavFish::f_att, NavFish::f_fluct, NavFish::f_w, NavFish::f_wall, foo, NavFish::heading, nav_fish, NavFish::r_w, NavFish::step_size, and NavFish::theta_w.
Referenced by nav_fish_velocity_run().
Here is the caller graph for this function:sign function
| number | x |
Definition at line 232 of file nav_fish.c.
Referenced by airspeed_uavcan_downlink(), eas_from_dynamic_pressure(), fx_fuselage(), fx_fy_hover(), fx_wing(), fy_wing(), fz_wing(), gec_process_msg3(), ms45xx_i2c_event(), nav_spiral_3D_setup(), and viewing_angle().
Here is the caller graph for this function:calculates a uav's viewing angle on another uav
| pos | ENU coordinates of the viewer drone |
| other | ENU coordinates of the viewed drone |
| psi | heading of the viewer drone |
Definition at line 301 of file nav_fish.c.
References dir, foo, sign(), and VECT3_DIFF.
Referenced by neighbor_attraction(), and neighbor_influence().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 152 of file nav_fish.c.
Referenced by distance_to_wall().
| struct NavFish nav_fish |
Definition at line 171 of file nav_fish.c.
Referenced by calculate_new_heading(), nav_fish_init(), nav_fish_velocity_run(), neighbor_attraction(), and send_swarm_message().
| struct NavFishParams nav_fish_params |
Definition at line 153 of file nav_fish.c.
Referenced by nav_fish_init().