|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Navigation module to drop a ball at a given point taking into account the wind and ground speed. More...
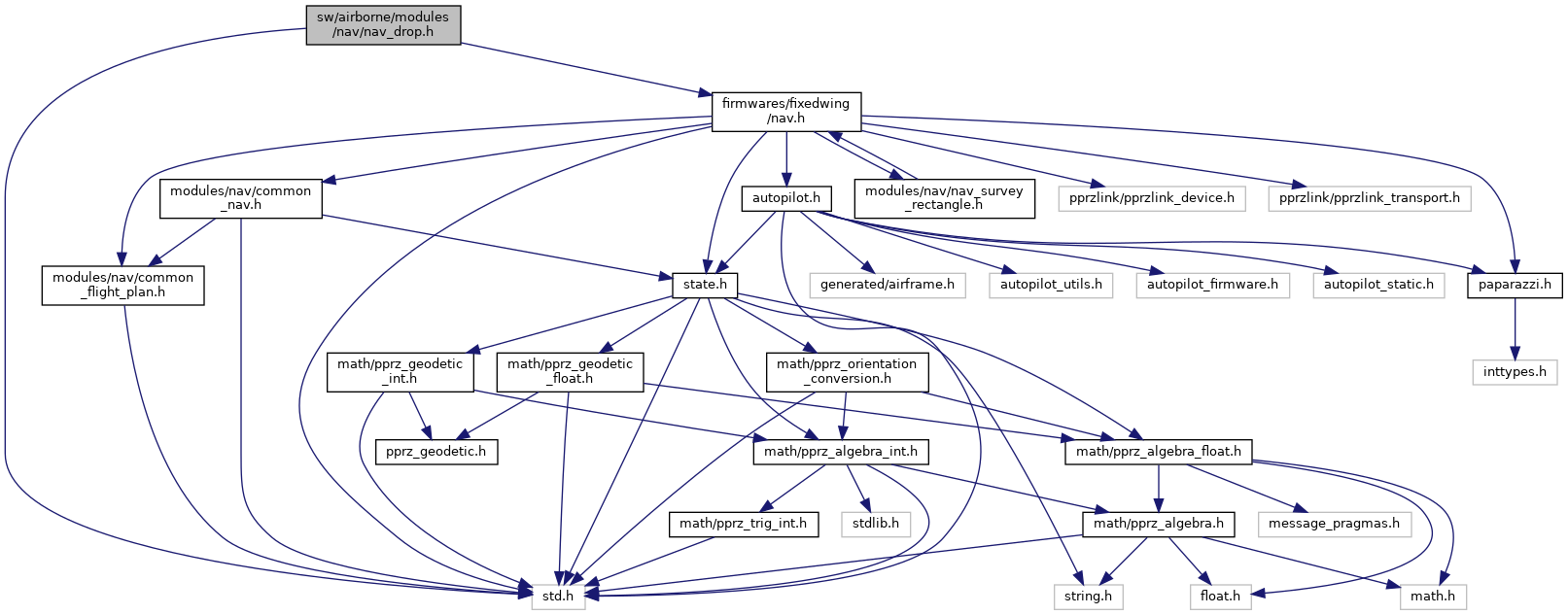
 Include dependency graph for nav_drop.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_drop.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| unit_t | nav_drop_compute_approach (uint8_t wp_target, uint8_t wp_start, uint8_t wp_baseturn, uint8_t wp_climbout, float radius) |
| unit_t | nav_drop_update_release (uint8_t wp_target) |
| unit_t | nav_drop_shoot (void) |
| bool | compute_alignment (uint8_t w1, uint8_t w2, uint8_t start, uint8_t end, float d_before, float d_after) |
Variables | |
| float | nav_drop_trigger_delay |
| float | nav_drop_start_qdr |
Navigation module to drop a ball at a given point taking into account the wind and ground speed.
Definition in file nav_drop.h.
| #define NavDropAligned | ( | ) | Qdr(DegOfRad(nav_drop_qdr_aligned)) |
Definition at line 46 of file nav_drop.h.
| #define NavDropCloseHatch | ( | ) | ({ command_set(COMMAND_HATCH, MIN_PPRZ); }) |
Definition at line 45 of file nav_drop.h.
| #define NavDropComputeApproach | ( | _target, | |
| _start, | |||
| _radius | |||
| ) | nav_drop_compute_approach(_target, _start, _radius) |
Definition at line 42 of file nav_drop.h.
| #define NavDropShoot | ( | ) | nav_drop_shoot() |
Definition at line 44 of file nav_drop.h.
| #define NavDropUpdateRelease | ( | _wp | ) | nav_drop_update_release(_wp) |
Definition at line 43 of file nav_drop.h.
|
extern |
|
extern |
| float nav_drop_start_qdr |
Definition at line 39 of file nav_drop.h.
|
extern |