|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Fixedwing Navigation in a cube towards a center. More...
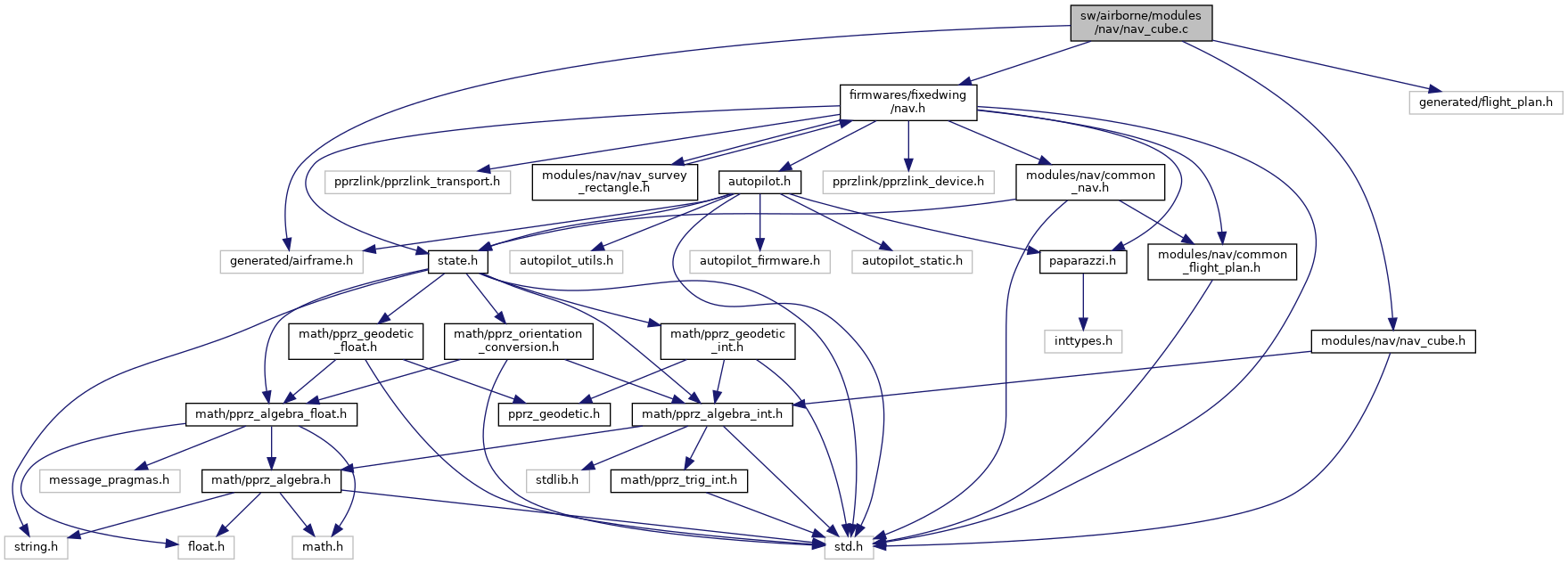
#include "generated/airframe.h"#include "modules/nav/nav_cube.h"#include "firmwares/fixedwing/nav.h"#include "generated/flight_plan.h" Include dependency graph for nav_cube.c:
Include dependency graph for nav_cube.c:Go to the source code of this file.
Macros | |
| #define | MAX_LINES_X 8 |
| #define | STBY_OFFSET 500 |
Functions | |
| void | nav_cube_setup (uint8_t center, uint8_t tb, uint8_t te) |
| bool | nav_cube_run (int8_t j, int8_t i, uint8_t dest_b, uint8_t dest_e, uint8_t src_b, uint8_t src_e) |
Variables | |
| struct NavCube | nav_cube |
Fixedwing Navigation in a cube towards a center.
Definition in file nav_cube.c.
| #define MAX_LINES_X 8 |
Definition at line 34 of file nav_cube.c.
| #define STBY_OFFSET 500 |
Definition at line 35 of file nav_cube.c.
| bool nav_cube_run | ( | int8_t | j, |
| int8_t | i, | ||
| uint8_t | dest_b, | ||
| uint8_t | dest_e, | ||
| uint8_t | src_b, | ||
| uint8_t | src_e | ||
| ) |
Definition at line 142 of file nav_cube.c.
References point::a, foo, NavCube::grid_z, ground_alt, nav_cube, NavCube::nline_x, NavCube::nline_z, waypoints, point::x, and point::y.
Definition at line 39 of file nav_cube.c.
References point::a, alpha, NavCube::alpha, foo, NavCube::grid_x, NavCube::grid_z, MAX_LINES_X, nav_cube, NavCube::nline_x, NavCube::nline_z, NavCube::nsect_x, NavCube::nsect_z, NavCube::offset, NavCube::sect, NavCube::size, STBY_OFFSET, waypoints, WaypointX, WaypointY, Int32Vect3::x, point::x, Int32Vect3::y, point::y, and Int32Vect3::z.
| struct NavCube nav_cube |
Definition at line 37 of file nav_cube.c.
Referenced by nav_cube_run(), and nav_cube_setup().