|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
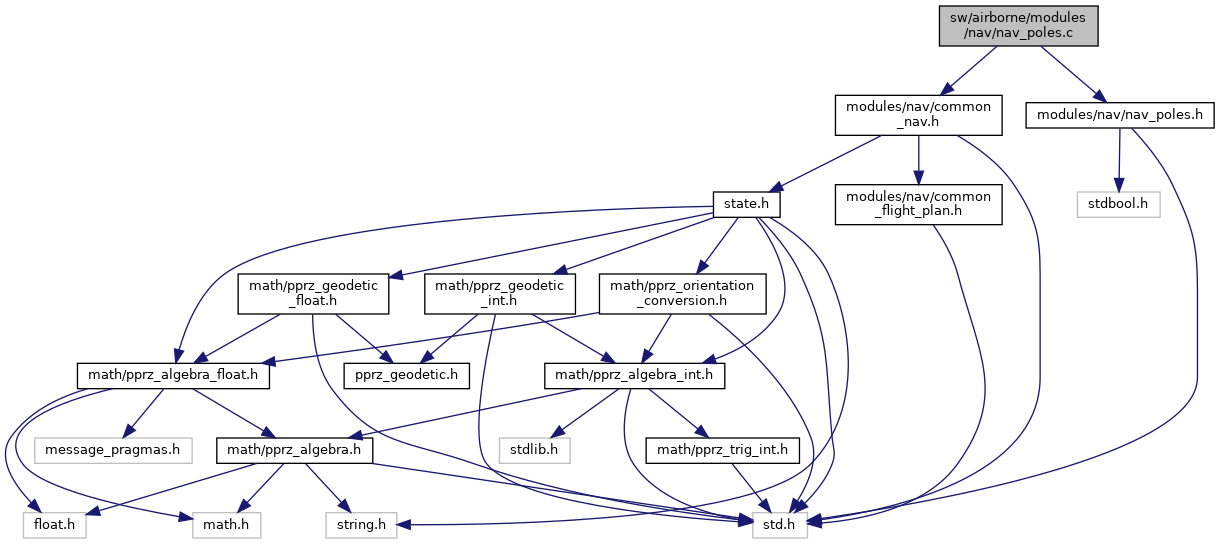
 Include dependency graph for nav_poles.c:
Include dependency graph for nav_poles.c:Go to the source code of this file.
Macros | |
| #define | SAFETY_MARGIN 0.7 |
Functions | |
| bool | nav_poles_init (uint8_t wp1, uint8_t wp2, uint8_t wp1c, uint8_t wp2c, float radius) |
| computes position of wp1c and wp2c, reference points for an oval around waypoints wp1 and wp2 | |
Variables | |
| uint8_t | nav_poles_count = 0 |
| float | nav_poles_time = 0. |
| int8_t | nav_poles_land = 1 |
| #define SAFETY_MARGIN 0.7 |
Definition at line 33 of file nav_poles.c.
computes position of wp1c and wp2c, reference points for an oval around waypoints wp1 and wp2
Definition at line 37 of file nav_poles.c.
References foo, SAFETY_MARGIN, WaypointX, and WaypointY.
| uint8_t nav_poles_count = 0 |
Definition at line 29 of file nav_poles.c.
| int8_t nav_poles_land = 1 |
Definition at line 31 of file nav_poles.c.
| float nav_poles_time = 0. |
Definition at line 30 of file nav_poles.c.