|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h" Include dependency graph for nav_fish.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_fish.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | NavFishParams |
| nav fish param structure More... | |
Functions | |
| void | nav_fish_init (void) |
| nav fish init | |
| bool | nav_fish_velocity_run (void) |
| nav fish velocity run | |
Variables | |
| struct NavFishParams | nav_fish_params |
Definition in file nav_fish.h.
| struct NavFishParams |
nav fish param structure
Definition at line 35 of file nav_fish.h.
| Data Fields | ||
|---|---|---|
| float | alpha | random fluctuation reduction to wall |
| float | alpha_rep | intensity of repulsion |
| float | alt | flight altitude |
| float | d0_ali | alignement balance distance |
| float | d0_att | attraction balance distance |
| float | e_w1 | wall interaction's first coefficient |
| float | e_w2 | wall interaction's first coefficient |
| float | fluct | random fluctuation intensity |
| float | l_ali | alignement distance |
| float | l_att | attraction distance |
| float | l_w | wall interaction distance |
| float | max_velocity | max velocity allowed |
| float | min_d2d | minimum distance between two drones |
| float | min_velocity | minimum velocity when facing obstacles |
| uint8_t | strategy | strategy for choosing focal uav : 0 for closest uav , 1 for most influential uav |
| float | tr_l_ali | alignement distance to trajectory intensity |
| float | tr_l_att | attraction distance to trajectory intensity |
| float | tr_y_ali | alignement to trajectory intensity |
| float | tr_y_att | attraction to trajectory intensity |
| float | y_ali | alignement intensity |
| float | y_att | attraction intensity |
| float | y_w | wall interaction intensity |
nav fish init
nav fish init
Definition at line 175 of file nav_fish.c.
References NavFishParams::alpha, NavFishParams::alpha_rep, NavFishParams::alt, NavFishParams::d0_ali, NavFishParams::d0_att, NavFishParams::e_w1, NavFishParams::e_w2, NavFish::f_ali, NavFish::f_att, NavFish::f_fluct, NavFish::f_w, NavFish::f_wall, NavFishParams::fluct, NavFish::heading, NavFishParams::l_ali, NavFishParams::l_att, NavFishParams::l_w, NavFishParams::max_velocity, NavFishParams::min_d2d, NavFishParams::min_velocity, nav_fish, NAV_FISH_ALPHA, NAV_FISH_ALPHA_REP, NAV_FISH_ALT, NAV_FISH_BODY_LENGTH, NAV_FISH_D0ALI, NAV_FISH_D0ATT, NAV_FISH_EW1, NAV_FISH_EW2, NAV_FISH_FLUCT, NAV_FISH_LALI, NAV_FISH_LATT, NAV_FISH_LW, NAV_FISH_MAXVELOCITY, NAV_FISH_MIND2D, NAV_FISH_MINVELOCITY, nav_fish_params, NAV_FISH_STRATEGY, NAV_FISH_TRLALI, NAV_FISH_TRLATT, NAV_FISH_TRYALI, NAV_FISH_TRYATT, NAV_FISH_YALI, NAV_FISH_YATT, NAV_FISH_YW, NavFish::r_w, NavFish::step_size, NavFishParams::strategy, NavFish::theta_w, NavFishParams::tr_l_ali, NavFishParams::tr_l_att, NavFishParams::tr_y_ali, NavFishParams::tr_y_att, NavFish::velocity, NavFishParams::y_ali, NavFishParams::y_att, and NavFishParams::y_w.
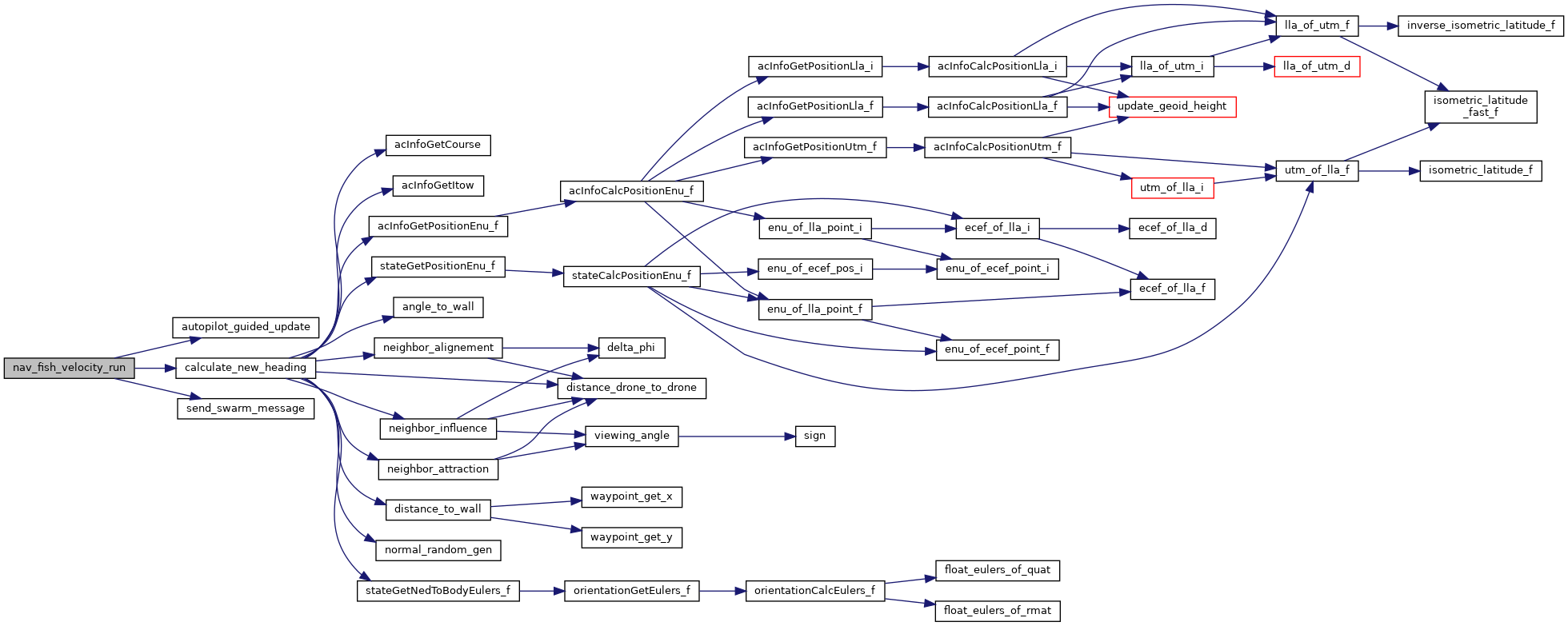
nav fish velocity run
nav fish velocity run
Definition at line 487 of file nav_fish.c.
References autopilot_guided_update(), calculate_new_heading(), counter, NavFish::f_w, FLOAT_ANGLE_NORMALIZE, foo, GUIDED_FLAG_XY_BODY, GUIDED_FLAG_XY_VEL, NavFish::heading, nav_fish, new_heading, nfp, PRESCALE, send_swarm_message(), and NavFish::velocity.
Here is the call graph for this function:
|
extern |
Definition at line 153 of file nav_fish.c.
Referenced by nav_fish_init().