|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
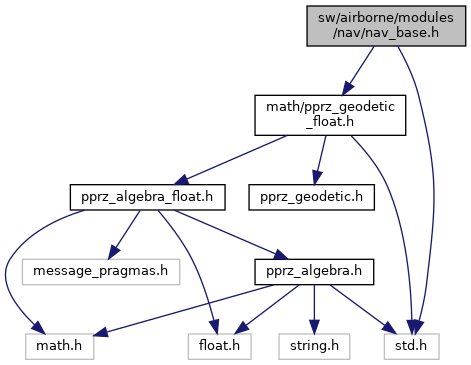
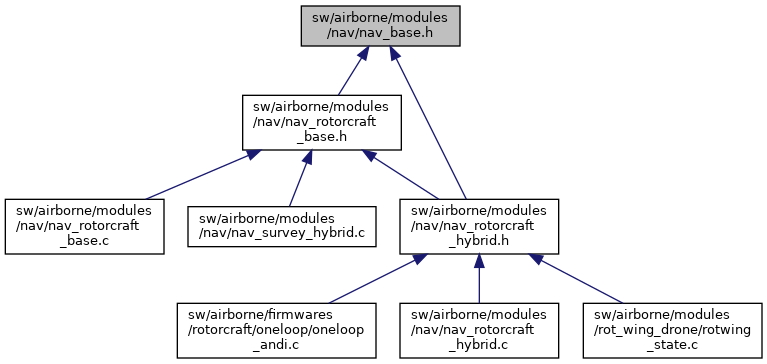
 Include dependency graph for nav_base.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_base.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | NavGoto_t |
| Waypoint and route pattern. More... | |
| struct | NavCircle_t |
| Circle pattern. More... | |
| struct | NavOval_t |
| struct | NavBase_t |
| Basic Nav struct. More... | |
Enumerations | |
| enum | oval_status { OR12 , OC2 , OR21 , OC1 } |
| Oval pattern. More... | |
Functions | |
| static float | nav_circle_get_count (struct NavCircle_t *circle) |
| helper functions | |
| static float | nav_circle_qdr (struct NavCircle_t *circle) |
Definition in file nav_base.h.
| struct NavGoto_t |
Waypoint and route pattern.
Definition at line 35 of file nav_base.h.
Collaboration diagram for NavGoto_t:| Data Fields | ||
|---|---|---|
| float | dist2_to_wp | squared distance to next waypoint |
| struct EnuCoor_f | from | start WP position |
| float | leg_length | leg length |
| float | leg_progress | progress over leg |
| struct EnuCoor_f | to | end WP position |
| struct NavCircle_t |
| struct NavOval_t |
Definition at line 55 of file nav_base.h.
| Data Fields | ||
|---|---|---|
| uint8_t | count | number of laps |
| enum oval_status | status | oval status |
| struct NavBase_t |
Basic Nav struct.
Definition at line 62 of file nav_base.h.
Collaboration diagram for NavBase_t:| Data Fields | ||
|---|---|---|
| struct NavCircle_t | circle | |
| struct NavGoto_t | goto_wp | |
| struct NavOval_t | oval | |
|
inlinestatic |
helper functions
Definition at line 70 of file nav_base.h.
References foo, and NavCircle_t::radians.
|
inlinestatic |
Definition at line 75 of file nav_base.h.
References foo, NormCourse, and NavCircle_t::qdr.