|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h" Include dependency graph for nav_line_osam.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_line_osam.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| bool | nav_line_osam_run (uint8_t From_WP, uint8_t To_WP, float radius, float Space_Before, float Space_After) |
| bool | nav_line_osam_block_run (uint8_t First_WP, uint8_t Last_WP, float radius, float Space_Before, float Space_After) |
|
extern |
Definition at line 176 of file nav_line_osam.c.
References CFLStatus, FLBlockCount, FLInitialize, foo, and nav_line_osam_run().
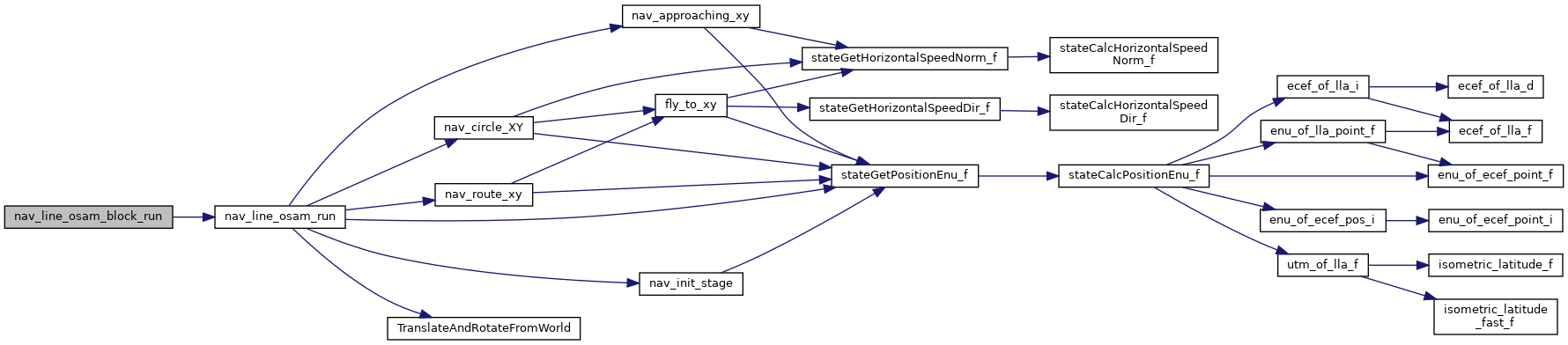
Here is the call graph for this function:
|
extern |
Definition at line 71 of file nav_line_osam.c.
References CFLStatus, FLCircle, FLCircleS, FLFinished, FLFROMWP, FLInitialize, FLLine, FLQDR, FLRadius, FLTOWP, foo, LINE_START_FUNCTION, LINE_STOP_FUNCTION, nav_approaching_xy(), nav_circle_XY(), nav_init_stage(), nav_route_xy(), NavCircleCount, NavQdrCloseTo, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, P, stateGetPositionEnu_f(), TranslateAndRotateFromWorld(), waypoints, WaypointX, WaypointY, EnuCoor_f::x, Point2D::x, EnuCoor_f::y, and Point2D::y.
Referenced by nav_line_osam_block_run().
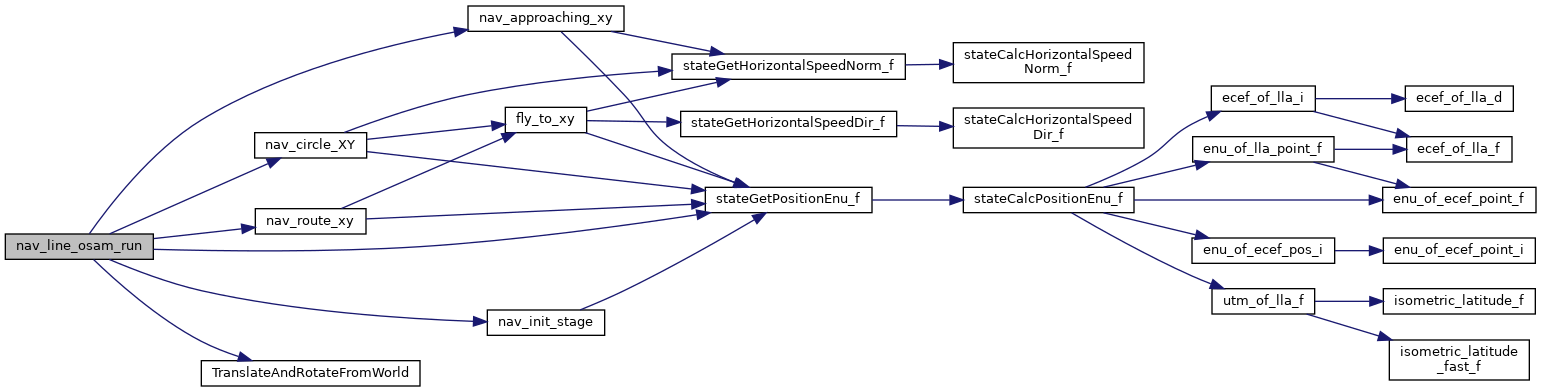
Here is the call graph for this function: Here is the caller graph for this function: