|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
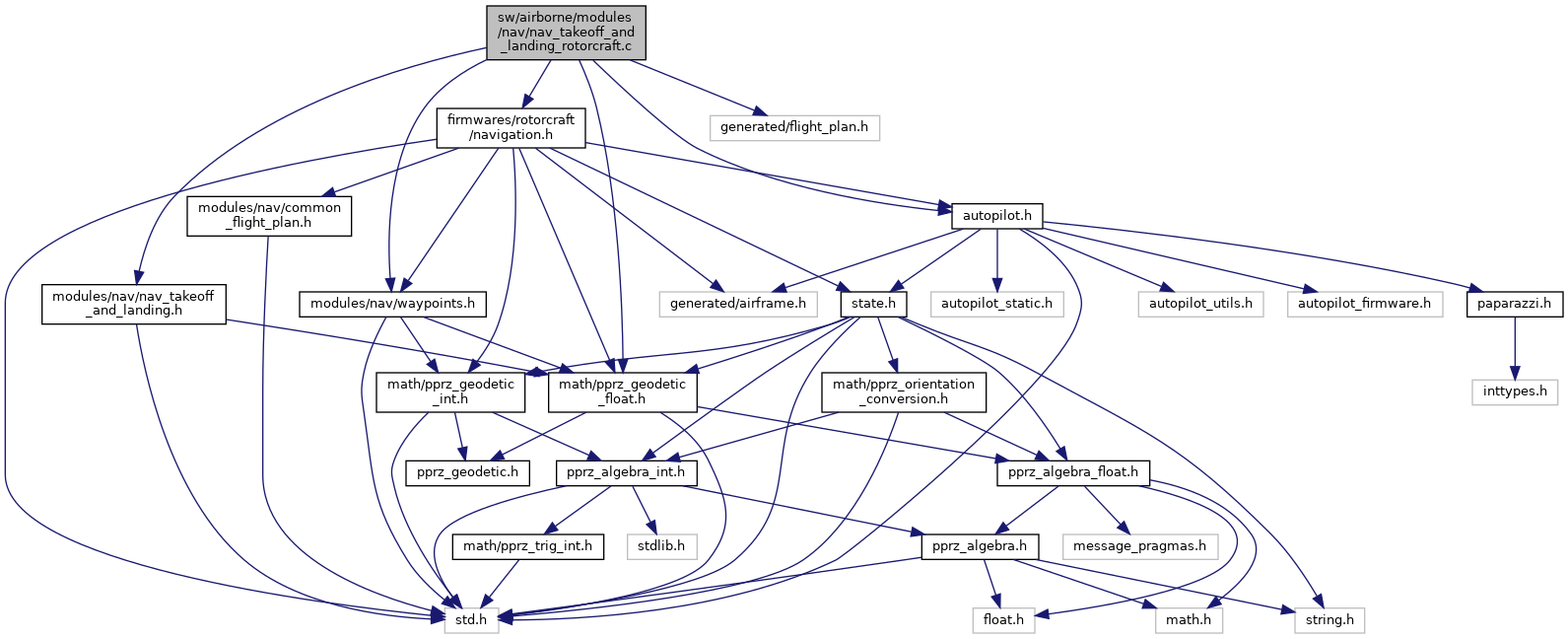
#include "modules/nav/nav_takeoff_and_landing.h"#include "math/pprz_geodetic_float.h"#include "generated/flight_plan.h"#include "firmwares/rotorcraft/navigation.h"#include "modules/nav/waypoints.h"#include "autopilot.h" Include dependency graph for nav_takeoff_and_landing_rotorcraft.c:
Include dependency graph for nav_takeoff_and_landing_rotorcraft.c:Go to the source code of this file.
Functions | |
| static bool | nav_takeoff_run (void) |
| static bool | nav_land_run (void) |
| void | nav_takeoff_and_landing_init (void) |
| Init function. | |
| void | nav_takeoff_and_landing_periodic (void) |
| Periodic timeout check function. | |
| bool | nav_takeoff_from_wp (uint8_t wp_id, float height) |
| Takeoff from a waypoint. | |
| bool | nav_takeoff_from_loc (float lat UNUSED, float lon UNUSED, float height) |
| bool | nav_takeoff_from_here (float height) |
| Takeoff from current location. | |
| bool | nav_land_at_wp (uint8_t td_id, uint8_t af_id, float radius UNUSED) |
| bool | nav_land_at_loc (float td_alt, float lat, float lon, float dir, float dist, float radius UNUSED) |
| bool | nav_land_here (float td_alt, float radius UNUSED) |
Variables | |
| static struct nav_takeoff | takeoff |
| static struct nav_landing | landing |
| float | nav_takeoff_direction |
| Takeoff direction in range [0-360] (deg) set to flight plan QFU by default. | |
Definition in file nav_takeoff_and_landing_rotorcraft.c.
Definition at line 47 of file nav_takeoff_and_landing_rotorcraft.c.
| #define NAV_LANDING_DESCEND_SPEED NAV_DESCEND_VSPEED |
Definition at line 43 of file nav_takeoff_and_landing_rotorcraft.c.
Definition at line 51 of file nav_takeoff_and_landing_rotorcraft.c.
| #define NAV_TAKEOFF_CLIMB_SPEED NAV_CLIMB_VSPEED |
Definition at line 35 of file nav_takeoff_and_landing_rotorcraft.c.
Definition at line 39 of file nav_takeoff_and_landing_rotorcraft.c.
| bool nav_land_at_loc | ( | float | td_alt, |
| float | lat, | ||
| float | lon, | ||
| float | dir, | ||
| float | dist, | ||
| float radius | UNUSED | ||
| ) |
Definition at line 277 of file nav_takeoff_and_landing_rotorcraft.c.
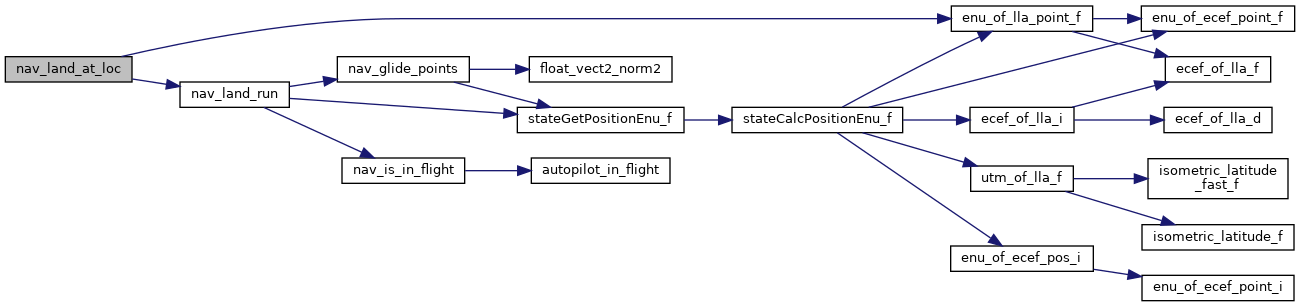
References nav_landing::af_id, nav_landing::af_pos, LlaCoor_f::alt, dir, enu_of_lla_point_f(), foo, landing, LlaCoor_f::lat, LlaCoor_f::lon, nav_land_run(), NAV_LANDING_AF_HEIGHT, NAV_LANDING_FLARE_HEIGHT, NAV_LANDING_INIT, stateGetLlaOrigin_f(), stateGetNedOrigin_f(), nav_landing::status, nav_landing::td_id, nav_landing::td_pos, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Here is the call graph for this function:Definition at line 263 of file nav_takeoff_and_landing_rotorcraft.c.
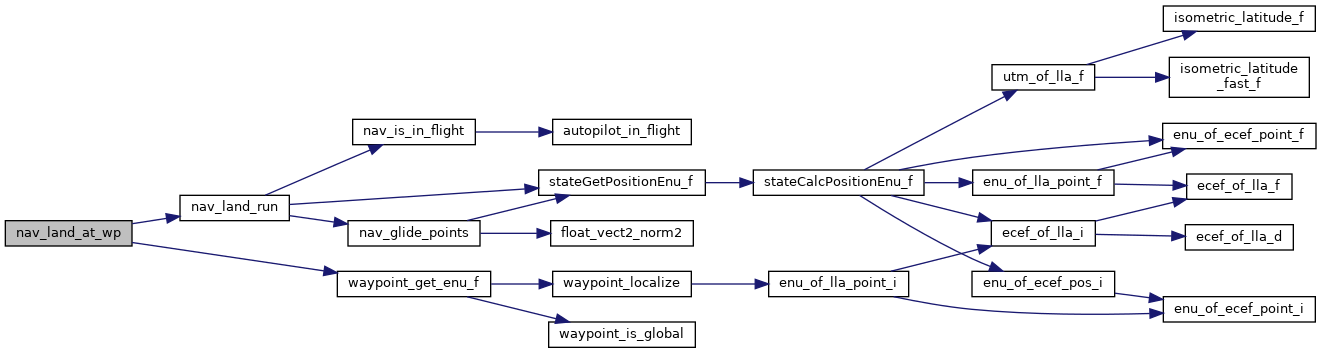
References nav_landing::af_id, nav_landing::af_pos, landing, nav_land_run(), NAV_LANDING_AF_HEIGHT, NAV_LANDING_FLARE_HEIGHT, NAV_LANDING_INIT, nav_landing::status, nav_landing::td_id, nav_landing::td_pos, waypoint_get_enu_f(), and EnuCoor_f::z.
Here is the call graph for this function:Definition at line 293 of file nav_takeoff_and_landing_rotorcraft.c.
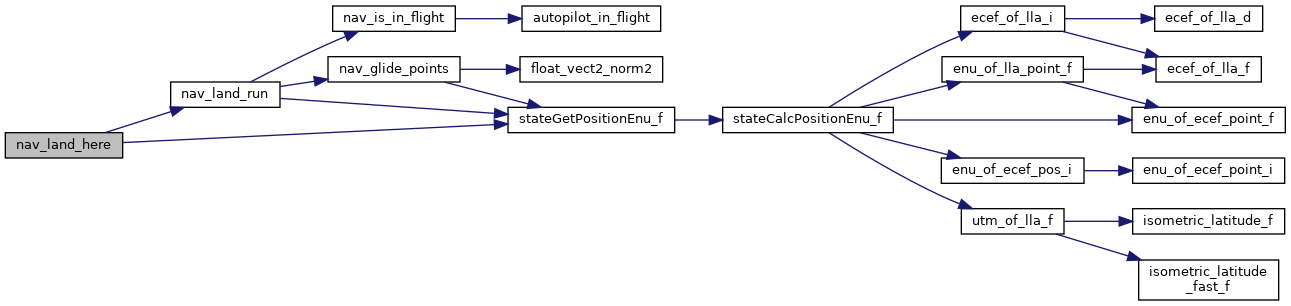
References nav_landing::af_id, nav_landing::af_pos, foo, landing, nav_land_run(), NAV_LANDING_AF_HEIGHT, NAV_LANDING_FLARE_HEIGHT, NAV_LANDING_INIT, stateGetPositionEnu_f(), nav_landing::status, nav_landing::td_id, nav_landing::td_pos, and EnuCoor_f::z.
Here is the call graph for this function:Definition at line 215 of file nav_takeoff_and_landing_rotorcraft.c.
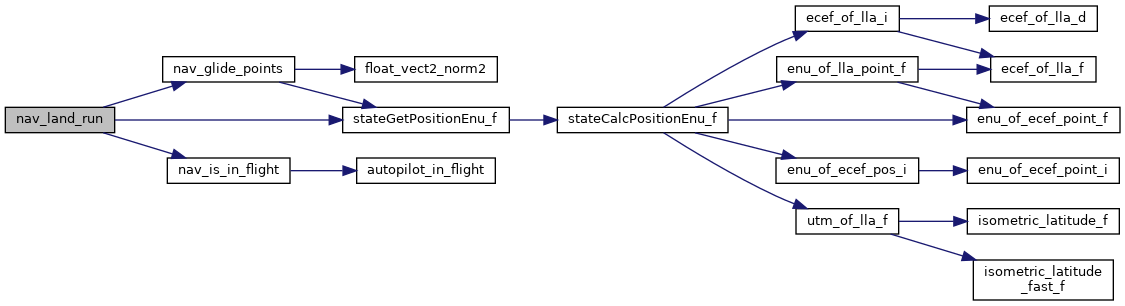
References nav_landing::af_pos, foo, landing, nav, RotorcraftNavigation::nav_approaching, nav_glide_points(), RotorcraftNavigation::nav_goto, nav_is_in_flight(), NAV_LANDING_DESCEND_SPEED, NAV_LANDING_DESCENT, NAV_LANDING_DONE, NAV_LANDING_FLARE, NAV_LANDING_INIT, NAV_LANDING_REACH_AF, RotorcraftNavigation::nav_route, NavKillThrottle, NavVerticalAltitudeMode, NavVerticalClimbMode, stateGetPositionEnu_f(), nav_landing::status, nav_landing::td_pos, nav_landing::timeout, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
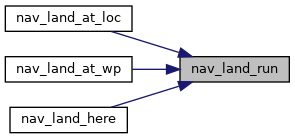
Referenced by nav_land_at_loc(), nav_land_at_wp(), and nav_land_here().
Here is the call graph for this function: Here is the caller graph for this function:Init function.
Definition at line 103 of file nav_takeoff_and_landing_rotorcraft.c.
References nav_landing::af_id, nav_takeoff::climb_id, foo, landing, landing, mission_register(), NAV_LANDING_INIT, nav_takeoff_direction, NAV_TAKEOFF_INIT, nav_landing::radius, nav_takeoff::status, nav_landing::status, takeoff, takeoff, nav_landing::td_id, nav_takeoff::timeout, and nav_landing::timeout.
Here is the call graph for this function:Periodic timeout check function.
Definition at line 122 of file nav_takeoff_and_landing_rotorcraft.c.
References landing, landing, NAV_LANDING_INIT, NAV_TAKEOFF_INIT, nav_takeoff::status, nav_landing::status, takeoff, takeoff, nav_takeoff::timeout, and nav_landing::timeout.
Takeoff from current location.
| [in] | height | height in meters for ending takeoff procedure (<0 to use default value) |
Definition at line 197 of file nav_takeoff_and_landing_rotorcraft.c.
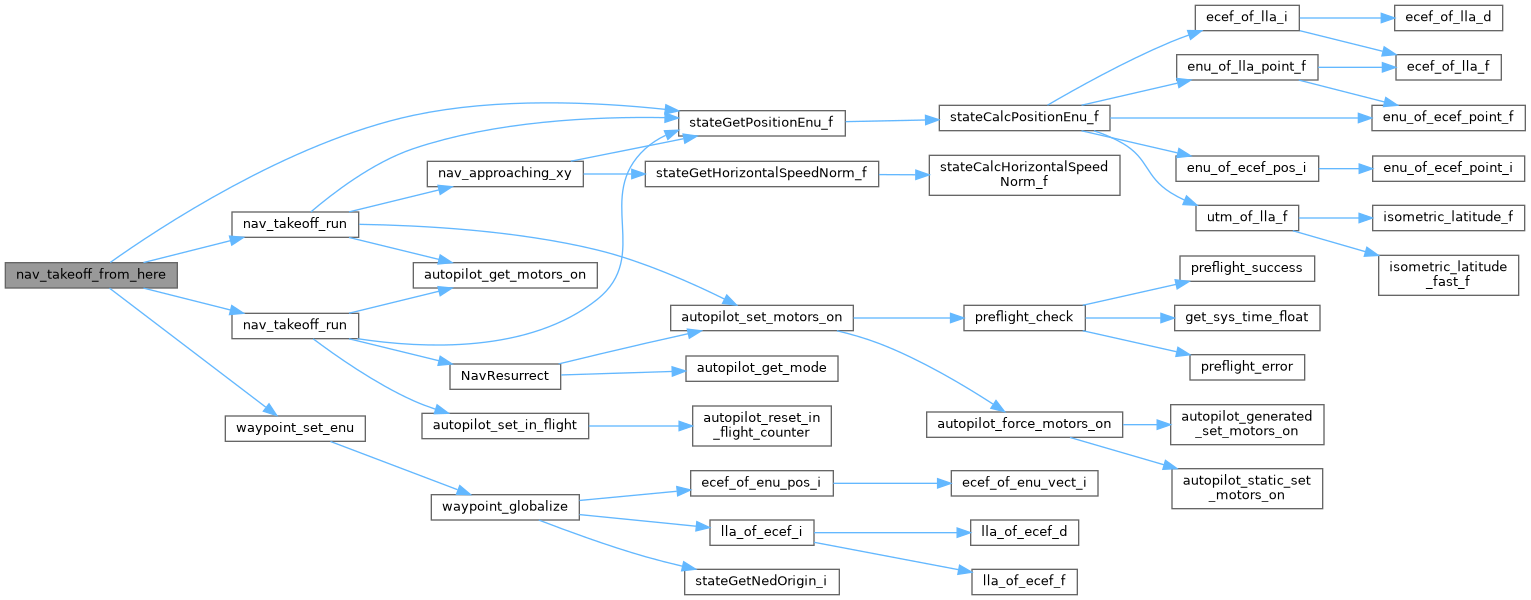
References nav_takeoff::climb_id, nav_takeoff::climb_pos, foo, nav_takeoff_direction, NAV_TAKEOFF_DIST, NAV_TAKEOFF_HEIGHT, NAV_TAKEOFF_INIT, nav_takeoff_run(), nav_takeoff_run(), nav_takeoff::start_pos, stateGetPositionEnu_f(), nav_takeoff::status, takeoff, takeoff, waypoint_set_enu(), EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Referenced by nav_takeoff_from_loc().
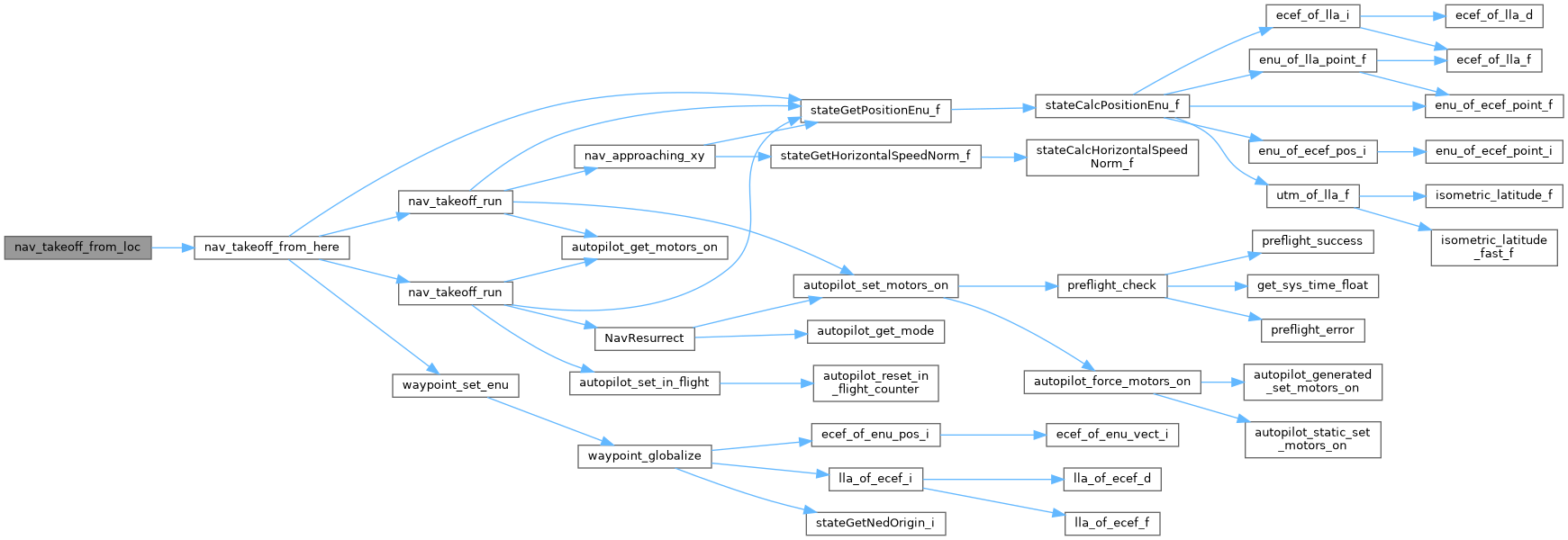
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 192 of file nav_takeoff_and_landing_rotorcraft.c.
References nav_takeoff_from_here().
Here is the call graph for this function:Takeoff from a waypoint.
| [in] | wp_id | waypoint ID |
| [in] | height | height in meters for ending takeoff procedure (<0 to use default value) |
Definition at line 175 of file nav_takeoff_and_landing_rotorcraft.c.
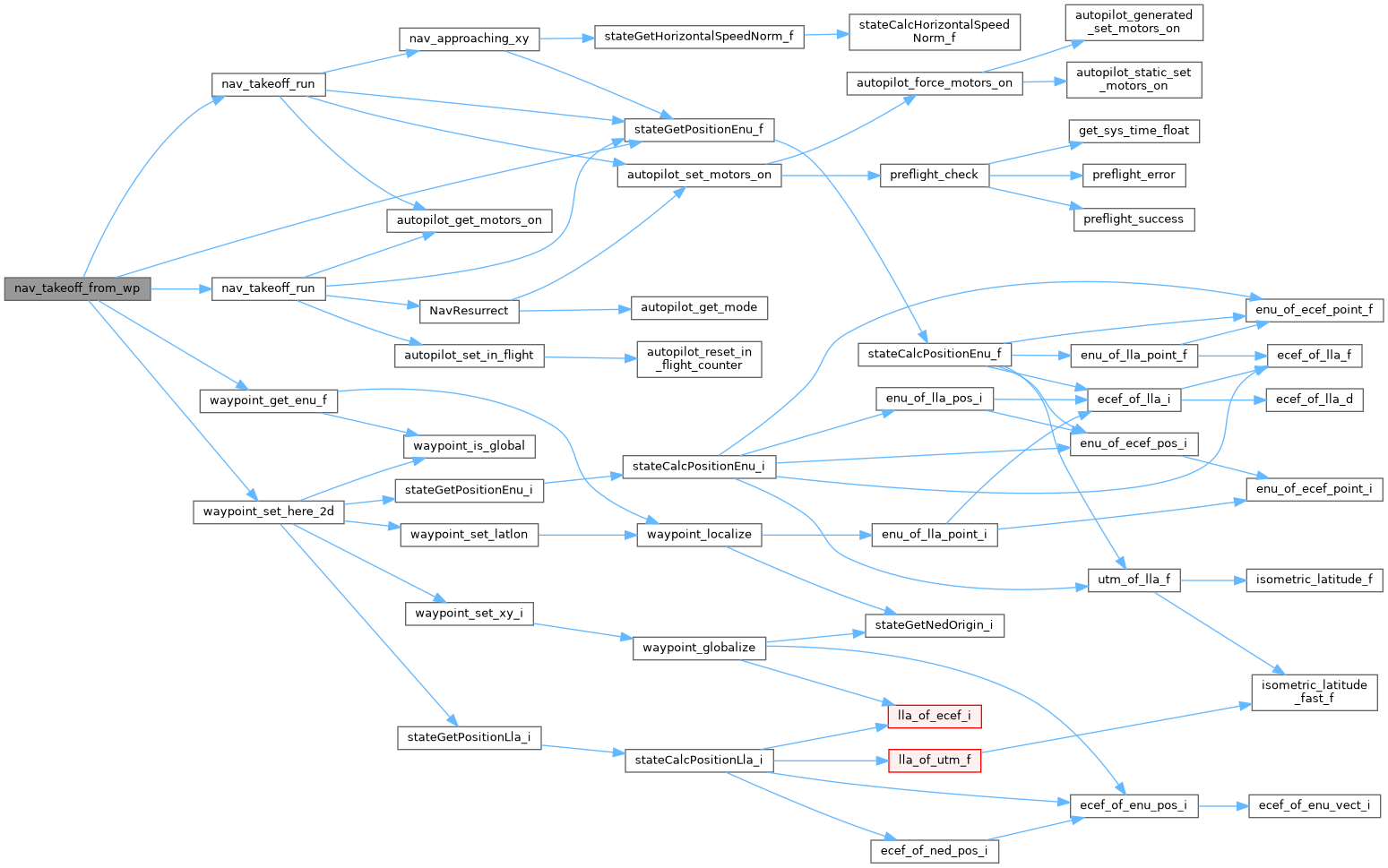
References nav_takeoff::climb_id, nav_takeoff::climb_pos, NAV_TAKEOFF_HEIGHT, NAV_TAKEOFF_INIT, nav_takeoff_run(), nav_takeoff_run(), nav_takeoff::start_pos, stateGetPositionEnu_f(), nav_takeoff::status, takeoff, takeoff, waypoint_get_enu_f(), waypoint_set_here_2d(), WaypointX, WaypointY, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Here is the call graph for this function:Definition at line 136 of file nav_takeoff_and_landing_rotorcraft.c.
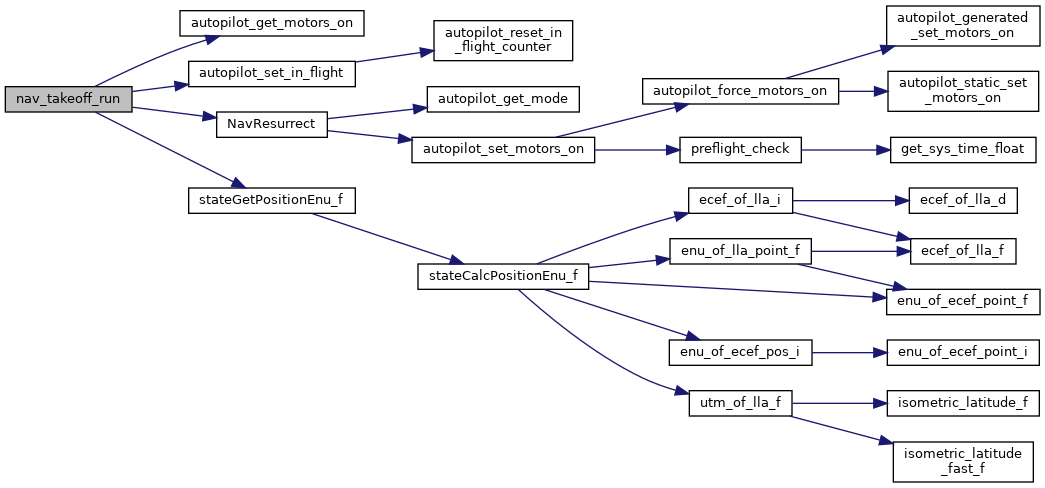
References autopilot_get_motors_on(), autopilot_set_in_flight(), nav_takeoff::climb_id, nav_takeoff::climb_pos, foo, NAV_TAKEOFF_CLIMB, NAV_TAKEOFF_CLIMB_SPEED, NAV_TAKEOFF_DONE, NAV_TAKEOFF_INIT, NAV_TAKEOFF_START_MOTOR, NavGotoWaypoint, NAVIGATION_FREQUENCY, NavResurrect(), NavVerticalClimbMode, nav_takeoff::start_pos, stateGetPositionEnu_f(), nav_takeoff::status, takeoff, nav_takeoff::timeout, and EnuCoor_f::z.
Referenced by nav_takeoff_from_here(), and nav_takeoff_from_wp().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 55 of file nav_takeoff_and_landing_rotorcraft.c.
Referenced by nav_land_at_loc(), nav_land_at_wp(), nav_land_here(), nav_land_run(), nav_takeoff_and_landing_init(), and nav_takeoff_and_landing_periodic().
| float nav_takeoff_direction |
Takeoff direction in range [0-360] (deg) set to flight plan QFU by default.
Definition at line 60 of file nav_takeoff_and_landing_rotorcraft.c.
Referenced by nav_takeoff_and_landing_init().
|
static |
Definition at line 54 of file nav_takeoff_and_landing_rotorcraft.c.
Referenced by nav_takeoff_and_landing_init(), nav_takeoff_and_landing_periodic(), nav_takeoff_from_here(), nav_takeoff_from_wp(), and nav_takeoff_run().