|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
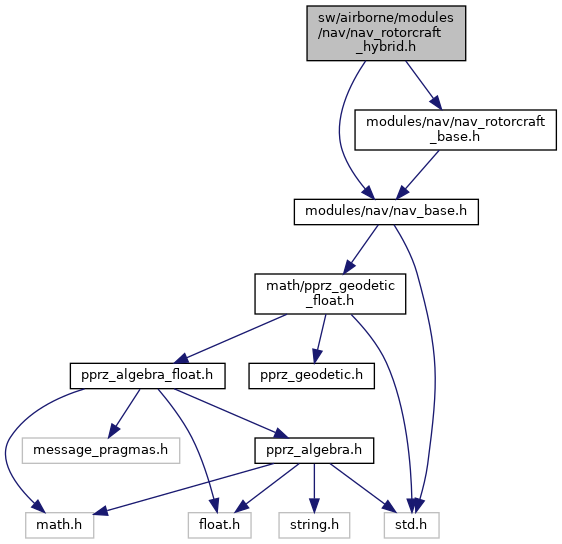
Specific navigation functions for hybrid aircraft. More...
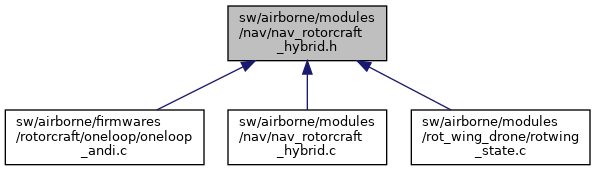
 Include dependency graph for nav_rotorcraft_hybrid.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_rotorcraft_hybrid.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | nav_rotorcraft_hybrid_init (void) |
| Init and register nav functions. | |
Specific navigation functions for hybrid aircraft.
FIXME for now, build on top of nav_rotorcraft_base
Definition in file nav_rotorcraft_hybrid.h.
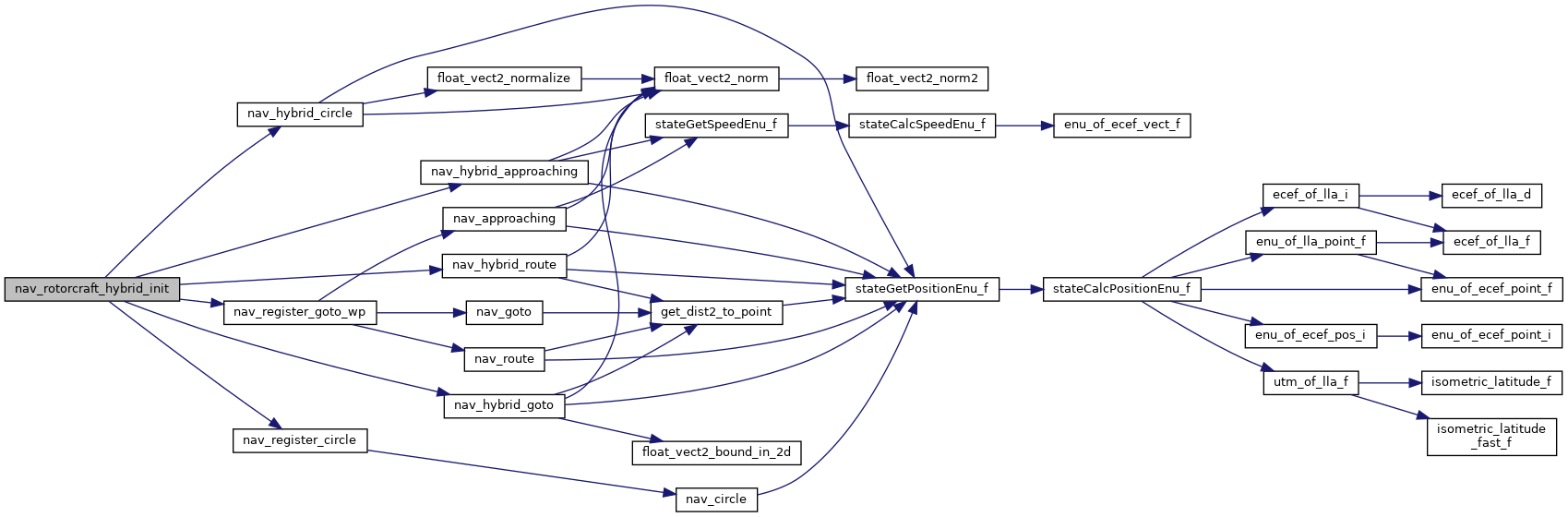
Init and register nav functions.
For hybrid vehicle nav Init should be called after the normal rotorcraft nav_init as we are reusing some of the functions and overwritting others
Definition at line 330 of file nav_rotorcraft_hybrid.c.
References NavBase_t::circle, DEFAULT_CIRCLE_RADIUS, NavBase_t::goto_wp, NavGoto_t::leg_length, NavGoto_t::leg_progress, nav_hybrid_approaching(), nav_hybrid_circle(), nav_hybrid_goto(), nav_hybrid_route(), nav_register_circle(), nav_register_goto_wp(), nav_rotorcraft_base, and NavCircle_t::radius.
Here is the call graph for this function:
|
extern |
forward flight for hybrid nav
Definition at line 161 of file guidance_indi_hybrid.c.
Referenced by compute_accel_from_speed_sp(), nav_hybrid_circle(), nav_hybrid_goto(), nav_hybrid_route(), and reshape_wind().
|
extern |
Definition at line 79 of file nav_rotorcraft_hybrid.c.
Referenced by nav_hybrid_route().
|
extern |
Definition at line 69 of file nav_rotorcraft_hybrid.c.
Referenced by nav_hybrid_circle().
|
extern |
Definition at line 33 of file nav_rotorcraft_hybrid.c.
Referenced by init_controller(), and nav_hybrid_circle().
|
extern |
Definition at line 74 of file nav_rotorcraft_hybrid.c.
Referenced by nav_hybrid_circle().
|
extern |
Definition at line 95 of file nav_rotorcraft_hybrid.c.
Referenced by init_controller(), nav_hybrid_circle(), nav_hybrid_goto(), and nav_hybrid_route().
|
extern |
Definition at line 67 of file nav_rotorcraft_hybrid.c.
Referenced by init_controller(), nav_hybrid_circle(), and nav_hybrid_goto().
|
extern |
Definition at line 66 of file nav_rotorcraft_hybrid.c.
Referenced by max_speed_for_deceleration(), and rotwing_state_periodic().
|
extern |
Definition at line 48 of file nav_rotorcraft_hybrid.c.
Referenced by init_controller(), max_speed_for_deceleration(), nav_hybrid_circle(), nav_hybrid_goto(), and nav_hybrid_route().