|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Automatic survey of a rectangle for rotorcraft. More...
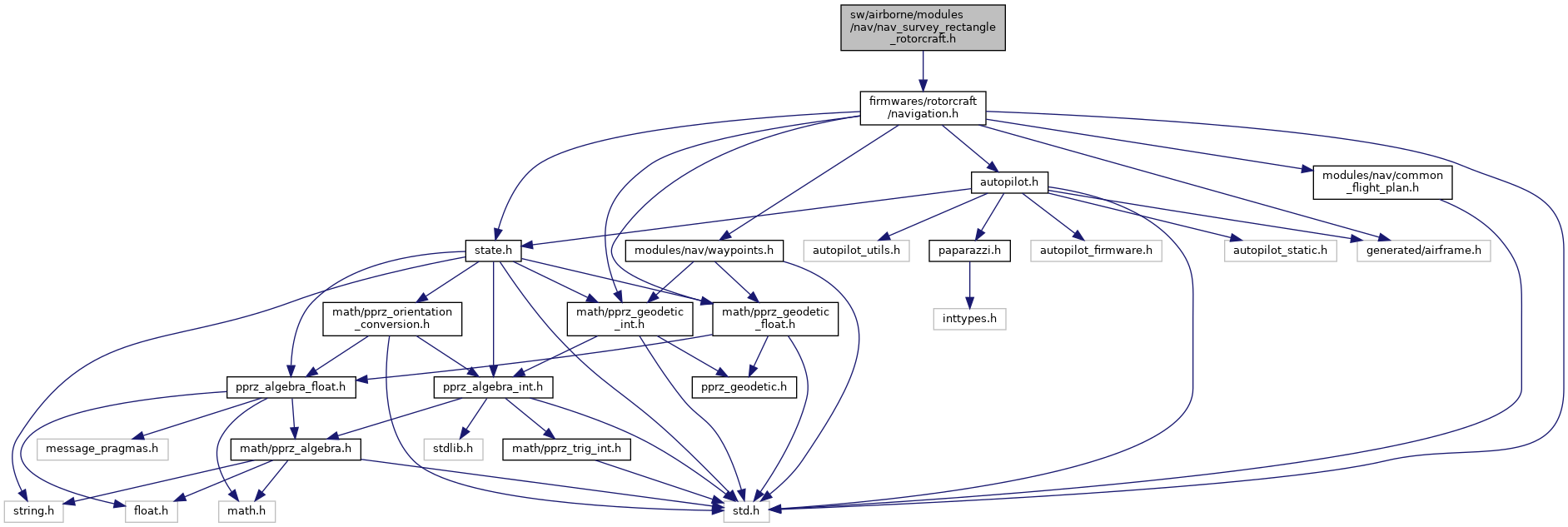
#include "firmwares/rotorcraft/navigation.h" Include dependency graph for nav_survey_rectangle_rotorcraft.h: This graph shows which files directly or indirectly include this file:
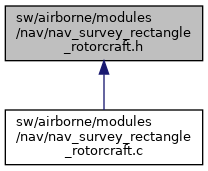
Include dependency graph for nav_survey_rectangle_rotorcraft.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Enumerations | |
| enum | survey_orientation_t { NS , WE } |
Variables | |
| float | sweep |
| uint16_t | rectangle_survey_sweep_num |
| bool | interleave |
Automatic survey of a rectangle for rotorcraft.
Rectangle is defined by two points, sweep can be south-north or west-east.
Definition in file nav_survey_rectangle_rotorcraft.h.
Definition at line 48 of file nav_survey_rectangle_rotorcraft.h.
| #define NavSurveyRectangleInit | ( | _wp1, | |
| _wp2, | |||
| _grid, | |||
| _orientation | |||
| ) | nav_survey_rectangle_rotorcraft_setup(_wp1, _wp2, _grid, _orientation) |
Definition at line 47 of file nav_survey_rectangle_rotorcraft.h.
| Enumerator | |
|---|---|
| NS | |
| WE | |
Definition at line 36 of file nav_survey_rectangle_rotorcraft.h.
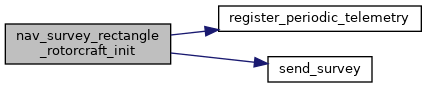
Definition at line 101 of file nav_survey_rectangle_rotorcraft.c.
References DefaultPeriodic, foo, register_periodic_telemetry(), and send_survey().
Here is the call graph for this function:Do half a circle around WP 0
Do half a circle around WP 0
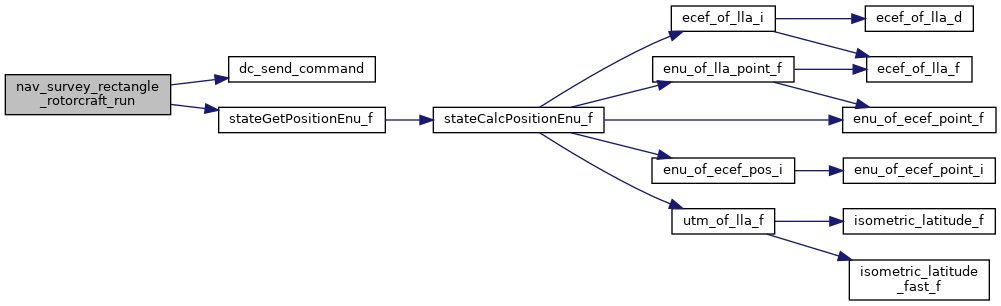
Definition at line 165 of file nav_survey_rectangle_rotorcraft.c.
References dc_distance_interval, dc_send_command(), DC_SHOOT, foo, interleave, LINE_START_FUNCTION, LINE_STOP_FUNCTION, Min, nav, RotorcraftNavigation::nav_approaching, nav_in_circle, nav_in_segment, RotorcraftNavigation::nav_route, nav_survey_east, nav_survey_north, nav_survey_rectangle_active, nav_survey_send, nav_survey_shift, nav_survey_south, nav_survey_west, NS, rectangle_survey_sweep_num, stateGetPositionEnu_f(), survey_from, survey_orientation, survey_to, survey_uturn, SurveyGoingEast, SurveyGoingNorth, SurveyGoingSouth, SurveyGoingWest, sweep, waypoints, WaypointX, WaypointY, WE, EnuCoor_f::x, point::x, EnuCoor_f::y, point::y, and EnuCoor_f::z.
Here is the call graph for this function:
|
extern |
Definition at line 108 of file nav_survey_rectangle_rotorcraft.c.
References foo, RotorcraftNavigation::horizontal_mode, LINE_STOP_FUNCTION, Min, nav, NAV_HORIZONTAL_MODE_ROUTE, nav_set_heading_deg(), nav_survey_east, nav_survey_north, nav_survey_rectangle_active, nav_survey_shift, nav_survey_south, nav_survey_west, NavVerticalAltitudeMode, NS, RECTANGLE_SURVEY_HEADING_NS, RECTANGLE_SURVEY_HEADING_WE, rectangle_survey_sweep_num, stateGetPositionEnu_f(), survey_from, survey_orientation, survey_to, survey_uturn, sweep, RotorcraftNavigation::target, VECT3_COPY, waypoints, WaypointX, WaypointY, EnuCoor_f::x, point::x, EnuCoor_f::y, and point::y.
Here is the call graph for this function:
|
extern |
Definition at line 67 of file nav_survey_rectangle_rotorcraft.c.
Referenced by nav_survey_rectangle_rotorcraft_run().
|
extern |
Definition at line 64 of file nav_survey_rectangle_rotorcraft.c.
Referenced by nav_survey_rectangle_rotorcraft_run(), and nav_survey_rectangle_rotorcraft_setup().
|
extern |
Definition at line 62 of file nav_survey_rectangle_rotorcraft.c.
Referenced by nav_gvf_survey_polygon_setup(), nav_survey_hybrid_setup(), nav_survey_hybrid_setup_orientation(), nav_survey_hybrid_setup_towards(), nav_survey_polygon_setup(), nav_survey_rectangle_rotorcraft_run(), and nav_survey_rectangle_rotorcraft_setup().