|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
gps landing system More...
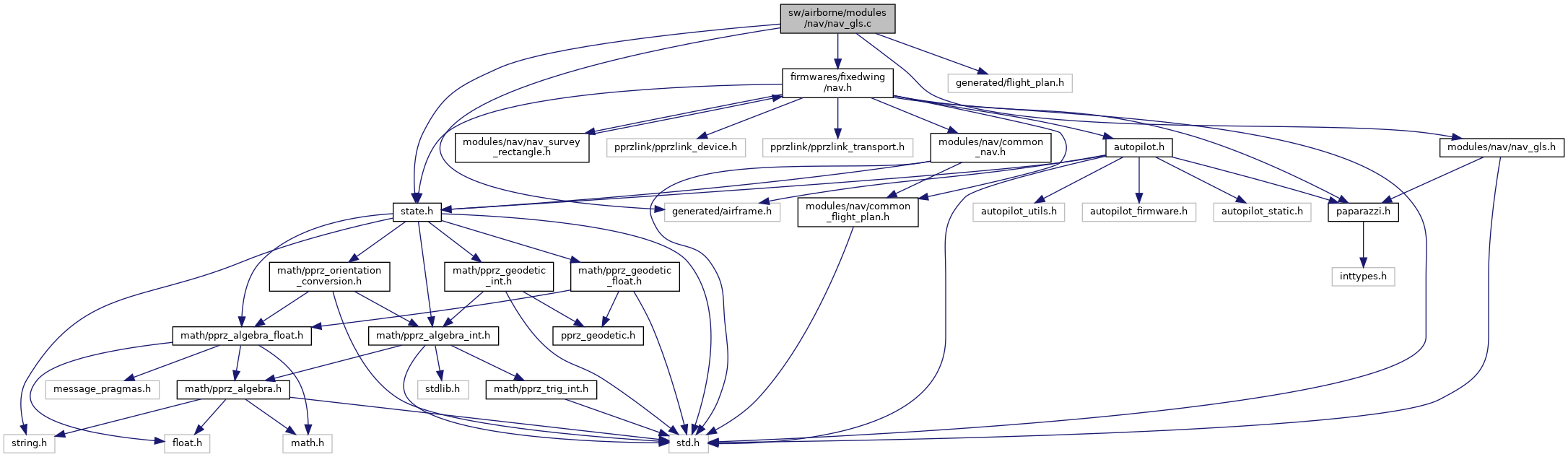
#include "generated/airframe.h"#include "state.h"#include "modules/nav/nav_gls.h"#include "firmwares/fixedwing/nav.h"#include "generated/flight_plan.h" Include dependency graph for nav_gls.c:
Include dependency graph for nav_gls.c:Go to the source code of this file.
Macros | |
| #define | APP_TARGET_SPEED NOMINAL_AIRSPEED |
| #define | MAX_WIND_ON_FINAL 0.8*APP_TARGET_SPEED |
| #define | APP_ANGLE RadOfDeg(5) |
| #define | APP_INTERCEPT_RATE 0.625 |
| #define | APP_DISTANCE_AF_SD 100 |
Functions | |
| static bool | gls_compute_TOD (uint8_t _af, uint8_t _sd, uint8_t _tod, uint8_t _td) |
| bool | gls_start (uint8_t _af, uint8_t _sd, uint8_t _tod, uint8_t _td) |
| bool | gls_run (uint8_t _af, uint8_t _sd, uint8_t _tod, uint8_t _td) |
Variables | |
| float | target_speed |
| float | app_angle |
| float | app_intercept_rate |
| float | app_distance_af_sd |
| bool | init = true |
| float | gs_on_final |
| float | sd_tod |
| float | sd_intercept |
| float | sd_tod_x |
| float | sd_tod_y |
gps landing system
gps landing system -automatic calculation of top of decent for const app angle -smooth intercept posible -landing direction is set by app fix / also possible in flight!!!
in airframe.xml it is possible to define
1 - only efective with useairspeed flag 2 - defauld is an approach angle of 5 degree which should be fine for most planes 3 - const. acceleration in z direction to reach desiered pre_climb 4 - distance between approach fix and top of decent
Definition in file nav_gls.c.
| #define APP_TARGET_SPEED NOMINAL_AIRSPEED |
| #define MAX_WIND_ON_FINAL 0.8*APP_TARGET_SPEED |
Definition at line 82 of file nav_gls.c.
References app_angle, app_distance_af_sd, app_intercept_rate, foo, gs_on_final, MAX_WIND_ON_FINAL, sd_intercept, sd_tod, sd_tod_x, sd_tod_y, stateGetHorizontalWindspeed_f(), target_speed, WaypointAlt, WaypointX, WaypointY, FloatVect2::x, and FloatVect2::y.
Referenced by gls_start().
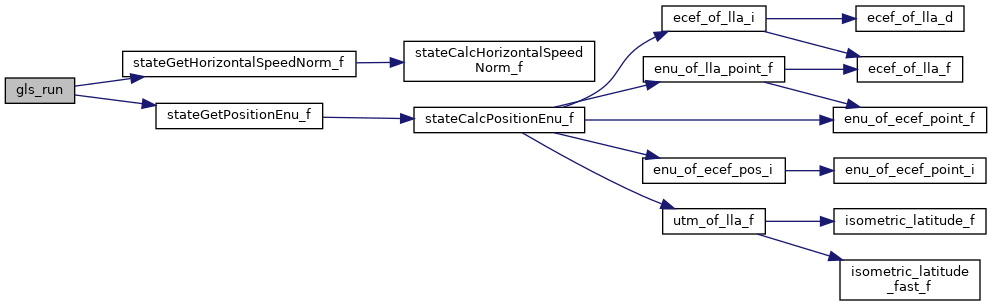
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 159 of file nav_gls.c.
References app_angle, app_distance_af_sd, app_intercept_rate, foo, gs_on_final, init, NavSegment, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, sd_intercept, sd_tod_x, sd_tod_y, stateGetHorizontalSpeedNorm_f(), stateGetPositionEnu_f(), target_speed, v_ctl_auto_airspeed_setpoint, WaypointAlt, WaypointX, and WaypointY.
Here is the call graph for this function:Definition at line 135 of file nav_gls.c.
References app_angle, APP_ANGLE, app_distance_af_sd, APP_DISTANCE_AF_SD, app_intercept_rate, APP_INTERCEPT_RATE, APP_TARGET_SPEED, foo, gls_compute_TOD(), init, and target_speed.
Here is the call graph for this function:| float app_angle |
Definition at line 53 of file nav_gls.c.
Referenced by gls_compute_TOD(), gls_run(), and gls_start().
| float app_distance_af_sd |
Definition at line 55 of file nav_gls.c.
Referenced by gls_compute_TOD(), gls_run(), and gls_start().
| float app_intercept_rate |
Definition at line 54 of file nav_gls.c.
Referenced by gls_compute_TOD(), gls_run(), and gls_start().
| float gs_on_final |
Definition at line 76 of file nav_gls.c.
Referenced by gls_compute_TOD(), and gls_run().
Definition at line 57 of file nav_gls.c.
Referenced by calculate_wind_no_airspeed(), gls_run(), gls_start(), main(), mission_nav_custom(), mission_nav_custom(), mission_nav_custom(), p4_halley(), and step_adaptation().
| float sd_intercept |
Definition at line 78 of file nav_gls.c.
Referenced by gls_compute_TOD(), and gls_run().
| float sd_tod |
Definition at line 77 of file nav_gls.c.
Referenced by gls_compute_TOD().
| float sd_tod_x |
Definition at line 79 of file nav_gls.c.
Referenced by gls_compute_TOD(), and gls_run().
| float sd_tod_y |
Definition at line 80 of file nav_gls.c.
Referenced by gls_compute_TOD(), and gls_run().
| float target_speed |
Definition at line 52 of file nav_gls.c.
Referenced by gls_compute_TOD(), gls_run(), and gls_start().