|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
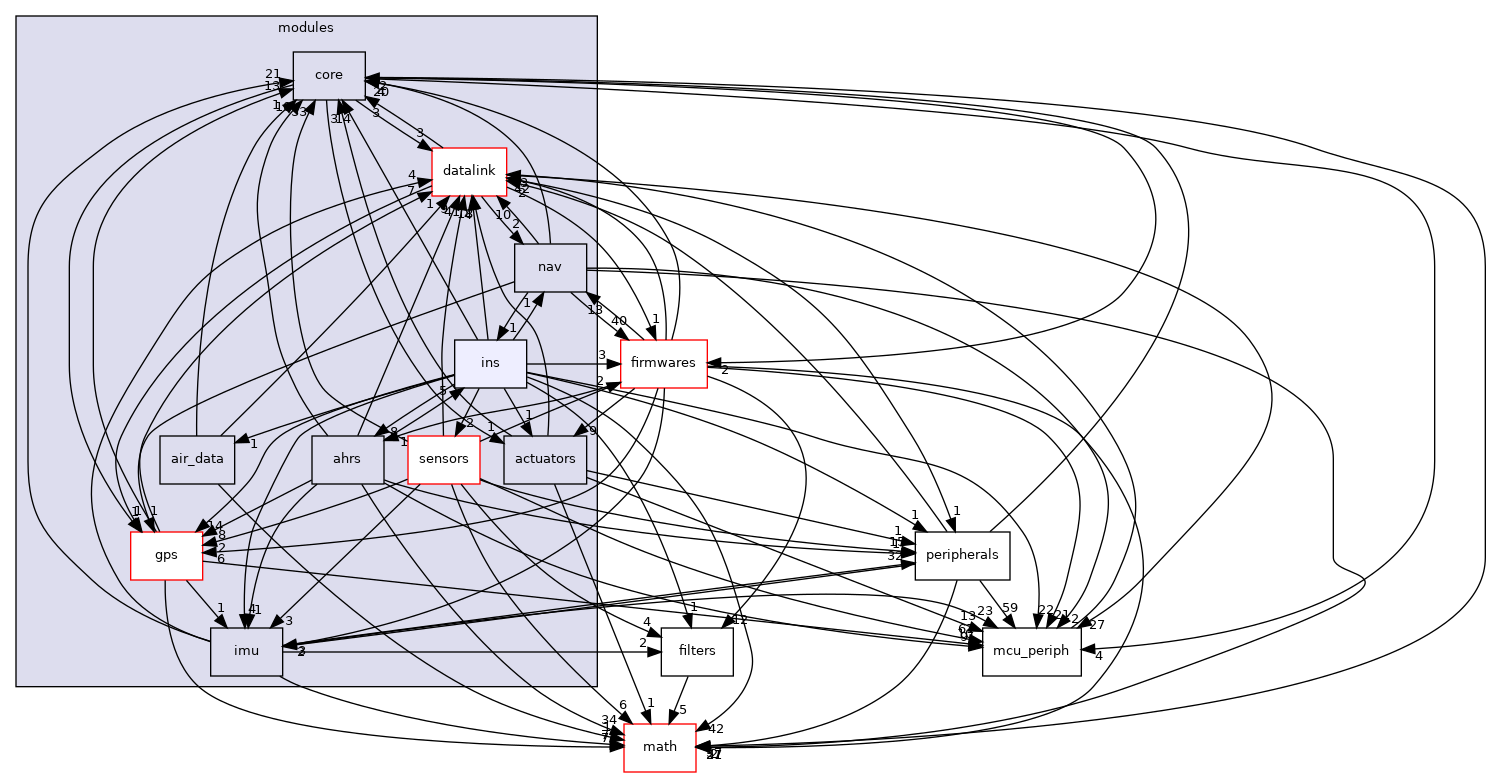
 Directory dependency graph for ins:
Directory dependency graph for ins:Files | |
| alt_filter.c | |
| alt_filter.h | |
| hf_float.c | |
| Horizontal filter (x,y) to estimate position and velocity. | |
| hf_float.h | |
| Horizontal filter (x,y) to estimate position and velocity. | |
| imu_temp_ctrl.c | |
| INS temperature control on pwm 6 for Bebop2, pwm 10 for DISCO. | |
| imu_temp_ctrl.h | |
| imu_xsens.c | |
| XSENS to just provide IMU measurements. | |
| imu_xsens.h | |
| XSENS to just provide IMU measurements. | |
| ins.c | |
| Integrated Navigation System interface. | |
| ins.h | |
| Integrated Navigation System interface. | |
| ins_alt_float.c | |
| Filters altitude and climb rate for fixedwings. | |
| ins_alt_float.h | |
| Filters altitude and climb rate for fixedwings. | |
| ins_arduimu.c | |
| ins_arduimu.h | |
| ins_arduimu_basic.c | |
| ins_arduimu_basic.h | |
| ins_ekf2.cpp | |
| INS based in the EKF2 of PX4. | |
| ins_ekf2.h | |
| INS based in the EKF2 of PX4. | |
| ins_ext_pose.c | |
| Integrated Navigation System interface. | |
| ins_ext_pose.h | |
| Integrated Navigation System interface. | |
| ins_float_invariant.c | |
| ins_float_invariant.h | |
| INS using invariant filter. | |
| ins_float_invariant_wrapper.c | |
| Paparazzi specific wrapper to run INVARIANT filter. | |
| ins_float_invariant_wrapper.h | |
| Paparazzi specific wrapper to run INVARIANT filter. | |
| ins_flow.c | |
| ins_flow.h | |
| ins_gps_passthrough.c | |
| Simply converts GPS ECEF position and velocity to NED and passes it through to the state interface. | |
| ins_gps_passthrough.h | |
| Simply passes GPS through to the state interface. | |
| ins_gps_passthrough_utm.c | |
| Simply passes GPS UTM position and velocity through to the state interface. | |
| ins_int.c | |
| INS for rotorcrafts combining vertical and horizontal filters. | |
| ins_int.h | |
| INS for rotorcrafts combining vertical and horizontal filters. | |
| ins_mekf_wind.cpp | |
| Multiplicative Extended Kalman Filter in rotation matrix formulation. | |
| ins_mekf_wind.h | |
| Multiplicative Extended Kalman Filter in rotation matrix formulation. | |
| ins_mekf_wind_wrapper.c | |
| Paparazzi specific wrapper to run MEKF-Wind INS filter. | |
| ins_mekf_wind_wrapper.h | |
| Paparazzi specific wrapper to run MEKF-Wind INS filter. | |
| ins_module.h | |
| Device independent INS code. | |
| ins_skeleton.c | |
| Paparazzi specific wrapper to run simple module based INS. | |
| ins_skeleton.h | |
| Paparazzi specific wrapper to run simple module based INS. | |
| ins_vectornav.c | |
| Vectornav VN-200 INS subsystem. | |
| ins_vectornav.h | |
| Vectornav VN-200 INS module. | |
| ins_vectornav_wrapper.c | |
| Vectornav VN-200 INS subsystem. | |
| ins_vectornav_wrapper.h | |
| Vectornav VN-200 INS subsystem. | |
| ins_vn100.c | |
| ins_vn100.h | |
| Interface for the VectorNav VN100 AHRS use the binary protocal on the SPI link. | |
| ins_xsens.c | |
| Xsens as a full INS solution. | |
| ins_xsens.h | |
| Xsens as a full INS solution. | |
| ins_xsens700.c | |
| Xsens700 as a full INS solution. | |
| ins_xsens700.h | |
| Xsens700 as a full INS solution. | |
| vf_extended_float.c | |
| Extended vertical filter (in float). | |
| vf_extended_float.h | |
| Interface for extended vertical filter (in float). | |
| vf_float.c | |
| Vertical filter (in float) estimating altitude, velocity and accel bias. | |
| vf_float.h | |
| Vertical filter (in float) estimating altitude, velocity and accel bias. | |
| VN100.h | |
| xsens.c | |
| Parser for the Xsens protocol. | |
| xsens.h | |
| Parser for the Xsens protocol. | |
| xsens700.c | |
| Parser for the Xsens700 protocol. | |
| xsens700.h | |
| Parser for the Xsens protocol. | |
| xsens_parser.c | |
| xsens_parser.h | |
| Parser for the XSens protocol. | |