|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
INS temperature control on pwm 6 for Bebop2, pwm 10 for DISCO. More...
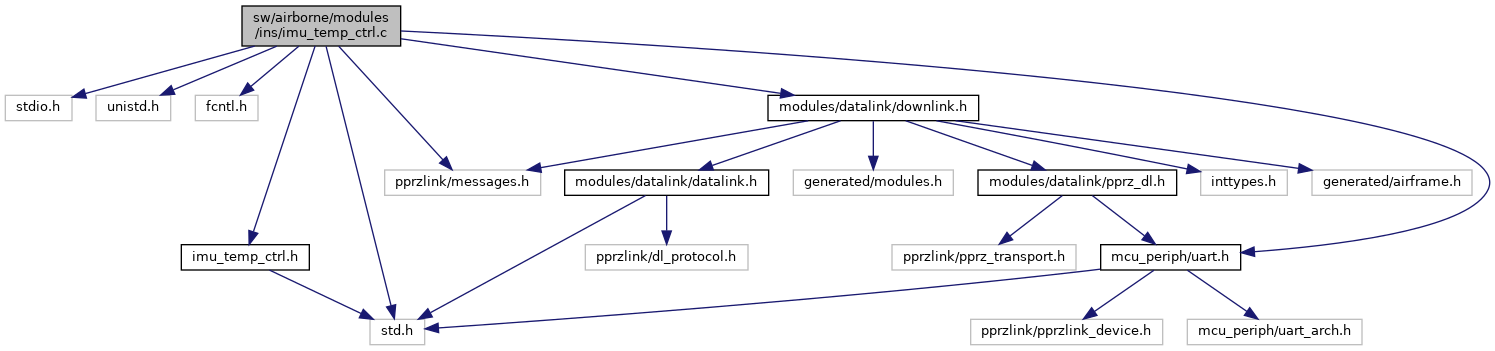
#include <stdio.h>#include <unistd.h>#include <fcntl.h>#include "std.h"#include "mcu_periph/uart.h"#include "pprzlink/messages.h"#include "modules/datalink/downlink.h"#include "imu_temp_ctrl.h" Include dependency graph for imu_temp_ctrl.c:
Include dependency graph for imu_temp_ctrl.c:Go to the source code of this file.
Macros | |
| #define | PWM_HEAT_CHAN PWM_HEAT_CHAN_DISCO |
Functions | |
| void | imu_temp_ctrl_periodic (void) |
| void | imu_temp_ctrl_init (void) |
Variables | |
| uint8_t | imu_temp_ctrl_ok = 0 |
| int | pwm_heat_duty_fd = 0 |
INS temperature control on pwm 6 for Bebop2, pwm 10 for DISCO.
Controls the heating resistors in the Bebop2 to keep the MPU6050 gyro/accel INS sensors at a constant temperature
Definition in file imu_temp_ctrl.c.
| #define PWM_HEAT_CHAN PWM_HEAT_CHAN_DISCO |
Definition at line 47 of file imu_temp_ctrl.c.
Definition at line 92 of file imu_temp_ctrl.c.
References foo, imu_temp_ctrl_ok, PWM_HEAT_CHAN, and pwm_heat_duty_fd.
Definition at line 52 of file imu_temp_ctrl.c.
References DefaultChannel, DefaultDevice, foo, imu_bebop, IMU_TEMP_CTRL_DUTY_MAX, IMU_TEMP_CTRL_KI, IMU_TEMP_CTRL_KP, imu_temp_ctrl_ok, IMU_TEMP_TARGET, ImuBebop::mpu, pwm_heat_duty_fd, and Mpu60x0_I2c::temp.
| uint8_t imu_temp_ctrl_ok = 0 |
Definition at line 41 of file imu_temp_ctrl.c.
Referenced by imu_temp_ctrl_init(), and imu_temp_ctrl_periodic().
| int pwm_heat_duty_fd = 0 |
Definition at line 42 of file imu_temp_ctrl.c.
Referenced by imu_temp_ctrl_init(), and imu_temp_ctrl_periodic().