|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | TypeKalman |
Macros | |
| #define | KALT_N_ETAT 3 |
Functions | |
| void | alt_filter_init (void) |
| void | alt_filter_periodic (void) |
Variables | |
| TypeKalman | alt_filter |
| struct TypeKalman |
Definition at line 38 of file alt_filter.h.
| Data Fields | ||
|---|---|---|
| float | Ad[KALT_N_ETAT][KALT_N_ETAT] | |
| float | Bd[KALT_N_ETAT] | |
| float | Md[KALT_N_ETAT][KALT_N_ETAT - 1] | |
| float | P[KALT_N_ETAT][KALT_N_ETAT] | |
| float | Te | |
| float | W[KALT_N_ETAT - 1][KALT_N_ETAT - 1] | |
| float | X[KALT_N_ETAT] | |
| #define KALT_N_ETAT 3 |
Definition at line 36 of file alt_filter.h.
Definition at line 49 of file alt_filter.c.
References alt_filter, kalmanInit(), last_baro_alt, last_gps_alt, MarcheAleaAccelerometre, MarcheAleaBiaisAltimetre, SigAltiAltimetre, and SigAltiGPS.
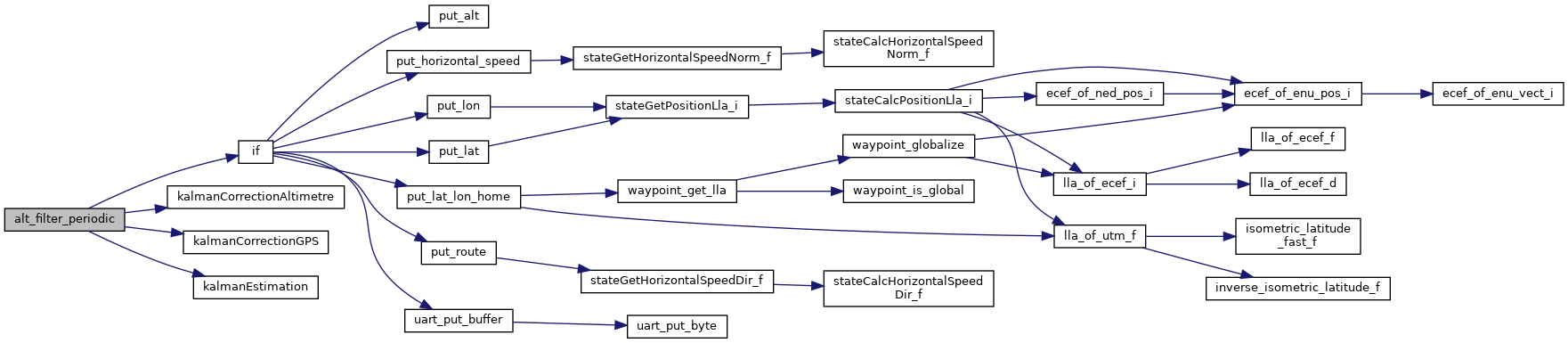
Here is the call graph for this function:Definition at line 61 of file alt_filter.c.
References alt_filter, baro_ets_altitude, DefaultChannel, DefaultDevice, foo, gps, GpsFixValid, GpsState::hmsl, kalmanCorrectionAltimetre(), kalmanCorrectionGPS(), kalmanEstimation(), last_baro_alt, last_gps_alt, TypeKalman::P, and TypeKalman::X.
Here is the call graph for this function:
|
extern |
Definition at line 31 of file alt_filter.c.
Referenced by alt_filter_init(), and alt_filter_periodic().