|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
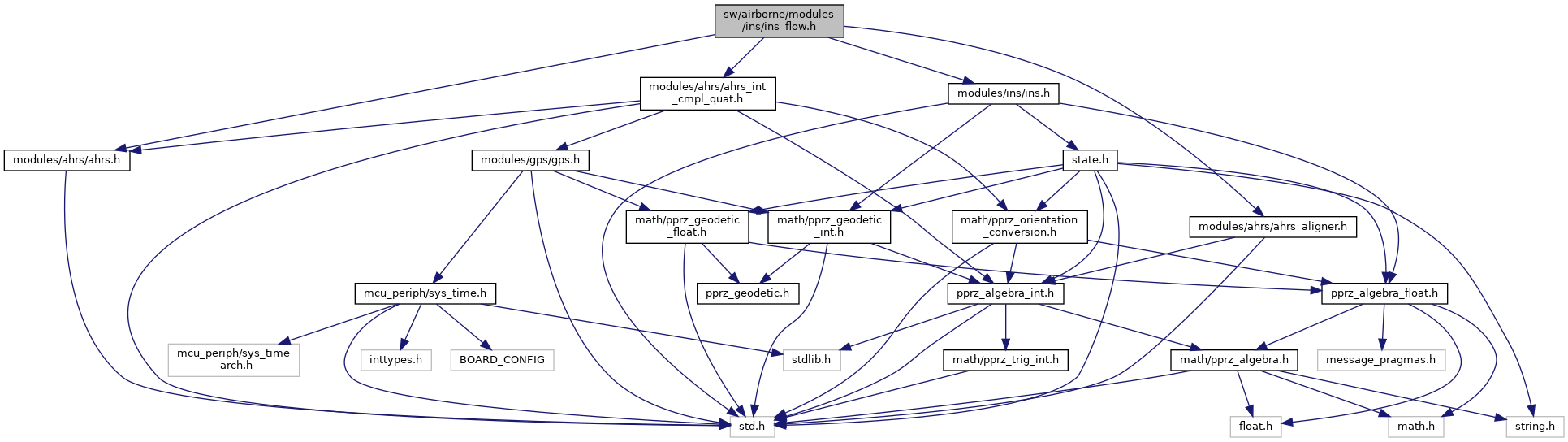
#include "modules/ahrs/ahrs.h"#include "modules/ahrs/ahrs_int_cmpl_quat.h"#include "modules/ahrs/ahrs_aligner.h"#include "modules/ins/ins.h" Include dependency graph for ins_flow.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ins_flow.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | CONSTANT_ALT_FILTER 1 |
| #define | OF_DRAG 1 |
| #define | OF_TWO_DIM 1 |
| #define | OF_THRUST_BIAS 0 |
| #define | OF_USE_GYROS 1 |
| #define | PREDICT_GYROS 0 |
| #define | N_STATES_OF_KF 5 |
| #define | OF_THRUST_BIAS_IND -1 |
| #define | OF_V_IND 0 |
| #define | OF_ANGLE_IND 1 |
| #define | OF_ANGLE_DOT_IND 2 |
| #define | OF_Z_IND 3 |
| #define | OF_Z_DOT_IND 4 |
| #define | OF_THETA_IND -1 |
| #define | OF_VX_IND -1 |
| #define | N_MEAS_OF_KF 2 |
| #define | OF_TB_Q 0.02 |
| #define | OF_TB_P 0.5 |
| #define | OF_LAT_FLOW_IND 0 |
| #define | OF_DIV_FLOW_IND 1 |
| #define | OF_RATE_IND 2 |
| #define | OF_LAT_FLOW_X_IND 2 |
| #define | USE_ANGLE 1 |
| #define | USE_VELOCITY 2 |
| #define | USE_HEIGHT 3 |
Functions | |
| void | ins_flow_init (void) |
| void | ins_flow_update (void) |
Variables | |
| float | OF_X [N_STATES_OF_KF] |
| bool | reset_filter |
| bool | run_filter |
| int | use_filter |
| float | thrust_factor |
| float | GT_phi |
| float | GT_theta |
| #define CONSTANT_ALT_FILTER 1 |
Definition at line 35 of file ins_flow.h.
| #define N_MEAS_OF_KF 2 |
Definition at line 122 of file ins_flow.h.
| #define N_STATES_OF_KF 5 |
Definition at line 100 of file ins_flow.h.
| #define OF_ANGLE_DOT_IND 2 |
Definition at line 109 of file ins_flow.h.
| #define OF_ANGLE_IND 1 |
Definition at line 108 of file ins_flow.h.
| #define OF_DIV_FLOW_IND 1 |
Definition at line 133 of file ins_flow.h.
| #define OF_DRAG 1 |
Definition at line 36 of file ins_flow.h.
| #define OF_LAT_FLOW_IND 0 |
Definition at line 132 of file ins_flow.h.
| #define OF_LAT_FLOW_X_IND 2 |
Definition at line 138 of file ins_flow.h.
| #define OF_RATE_IND 2 |
Definition at line 134 of file ins_flow.h.
| #define OF_TB_P 0.5 |
Definition at line 129 of file ins_flow.h.
| #define OF_TB_Q 0.02 |
Definition at line 128 of file ins_flow.h.
| #define OF_THETA_IND -1 |
Definition at line 113 of file ins_flow.h.
| #define OF_THRUST_BIAS 0 |
Definition at line 40 of file ins_flow.h.
| #define OF_THRUST_BIAS_IND -1 |
Definition at line 101 of file ins_flow.h.
| #define OF_TWO_DIM 1 |
Definition at line 38 of file ins_flow.h.
| #define OF_USE_GYROS 1 |
Definition at line 42 of file ins_flow.h.
| #define OF_V_IND 0 |
Definition at line 107 of file ins_flow.h.
| #define OF_VX_IND -1 |
Definition at line 114 of file ins_flow.h.
| #define OF_Z_DOT_IND 4 |
Definition at line 111 of file ins_flow.h.
| #define OF_Z_IND 3 |
Definition at line 110 of file ins_flow.h.
| #define PREDICT_GYROS 0 |
Definition at line 44 of file ins_flow.h.
| #define USE_ANGLE 1 |
Definition at line 143 of file ins_flow.h.
| #define USE_HEIGHT 3 |
Definition at line 145 of file ins_flow.h.
| #define USE_VELOCITY 2 |
Definition at line 144 of file ins_flow.h.
Definition at line 532 of file ins_flow.c.
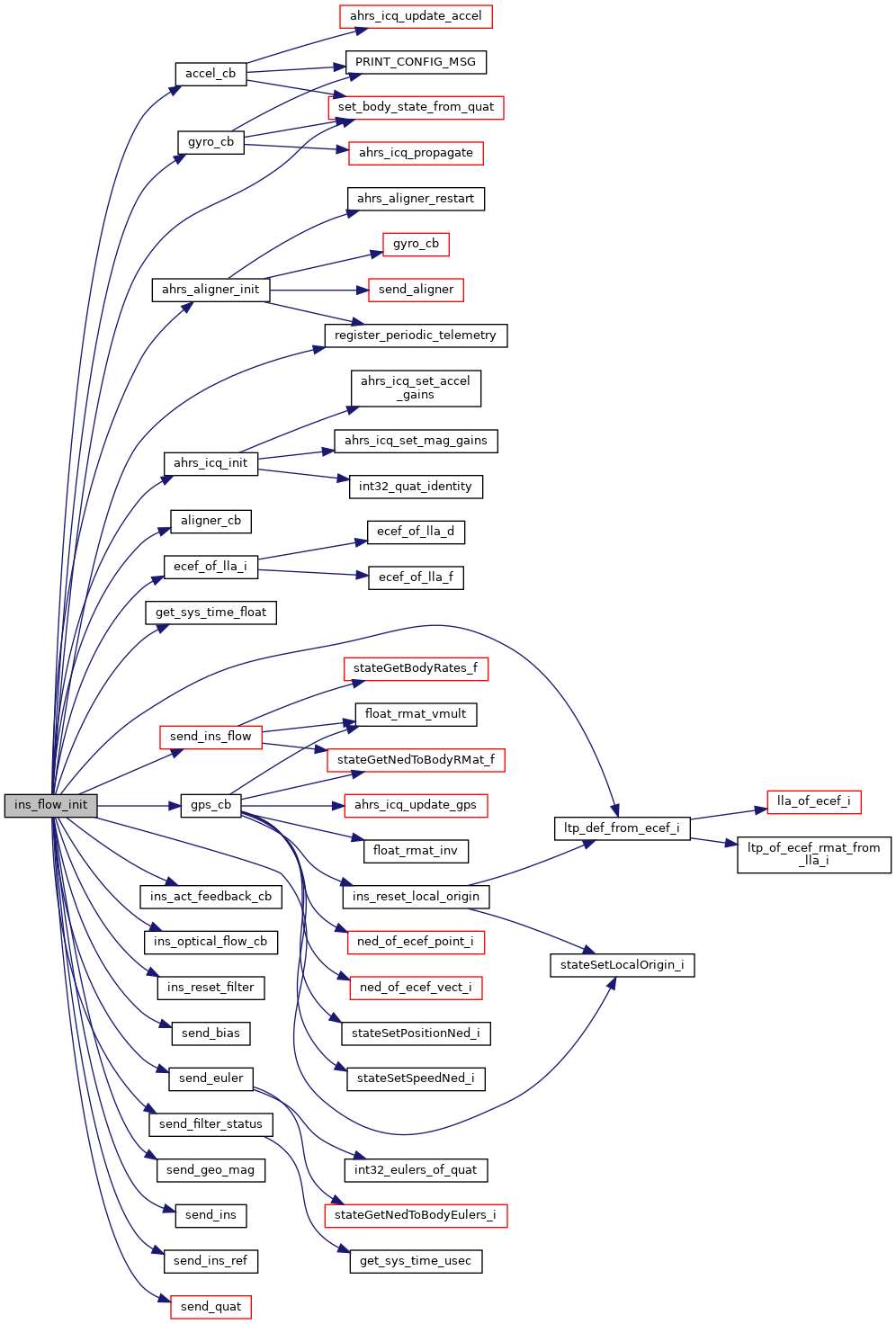
References ABI_BROADCAST, accel_cb(), accel_ev, ahrs_aligner_init(), ahrs_icq_init(), aligner_cb(), aligner_ev, CONSTANT_ALT_FILTER, DefaultPeriodic, E, ecef_of_lla_i(), foo, get_sys_time_float(), gps_cb(), gps_ev, GT_phi, GT_theta, gyro_cb(), gyro_ev, LtpDef_i::hmsl, ins_act_feedback_cb(), ins_act_feedback_ev, ins_flow, INS_FLOW_ACCEL_ID, INS_FLOW_GPS_ID, INS_FLOW_GYRO_ID, INS_FLOW_IMU_ID, ins_optical_flow_cb(), ins_optical_flow_ev, INS_OPTICAL_FLOW_ID, ins_reset_filter(), INS_RPM_ID, LlaCoor_i::lat, lp_factor, lp_factor_strong, InsFlow::lp_gyro_bias_pitch, InsFlow::lp_gyro_bias_roll, InsFlow::lp_gyro_pitch, InsFlow::lp_gyro_roll, InsFlow::lp_roll_command, InsFlow::lp_thrust, ltp_def, InsFlow::ltp_def, ltp_def_from_ecef_i(), InsFlow::ltp_initialized, moment_ind, N_MEAS_OF_KF, InsFlow::new_flow_measurement, OF_ANGLE_DOT_IND, OF_ANGLE_IND, OF_DIV_FLOW_IND, OF_LAT_FLOW_IND, OF_LAT_FLOW_X_IND, of_prev_time, OF_Q, OF_R, OF_RATE_IND, OF_THETA_IND, OF_THRUST_BIAS, OF_THRUST_BIAS_IND, of_time, OF_TWO_DIM, OF_V_IND, OF_VX_IND, OF_Z_DOT_IND, OF_Z_IND, PAR_K0, PAR_K1, PAR_K2, PAR_K3, PAR_Q0, PAR_Q1, PAR_Q2, PAR_Q3, PAR_Q4, PAR_Q_TB, PAR_R0, PAR_R1, parameters, register_periodic_telemetry(), reset_cb(), reset_ev, reset_filter, RPM_FACTORS, run_filter, send_bias(), send_euler(), send_filter_status(), send_geo_mag(), send_ins(), send_ins_flow(), send_ins_ref(), send_quat(), set_body_state_from_quat(), stateSetLocalOrigin_i(), InsFlow::thrust_factor, and use_filter.
Here is the call graph for this function:Definition at line 725 of file ins_flow.c.
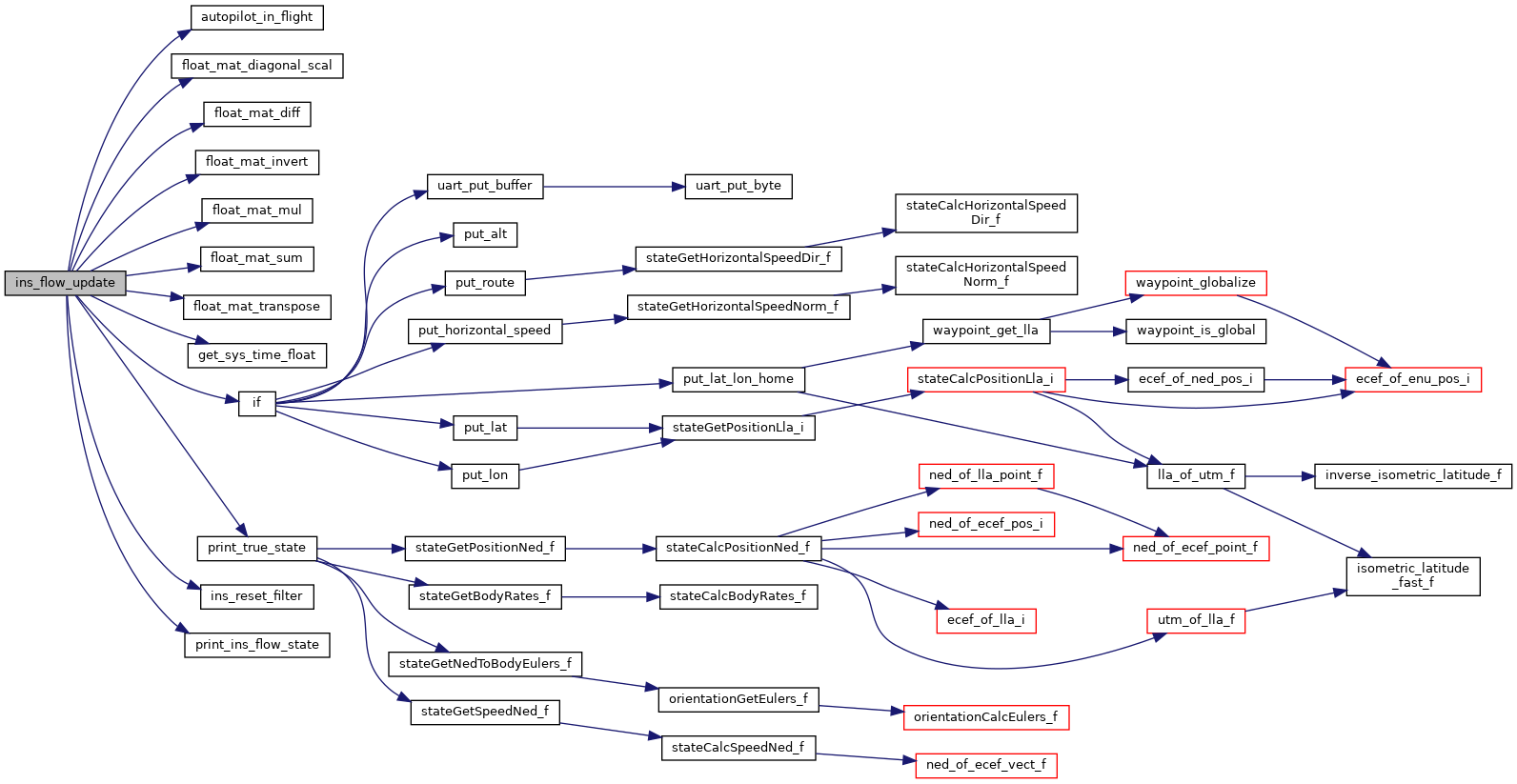
References autopilot_in_flight(), Stabilization::cmd, CONSTANT_ALT_FILTER, DEBUG_INS_FLOW, DEBUG_MAT_PRINT, DEBUG_PRINT, InsFlow::divergence, E, float_mat_diagonal_scal(), float_mat_diff(), float_mat_invert(), float_mat_mul(), float_mat_sum(), float_mat_transpose(), foo, g, get_sys_time_float(), H, ins_flow, ins_reset_filter(), K, lp_factor_strong, InsFlow::lp_gyro_bias_pitch, InsFlow::lp_gyro_bias_roll, InsFlow::lp_gyro_pitch, InsFlow::lp_gyro_roll, InsFlow::lp_roll_command, InsFlow::lp_thrust, MAKE_MATRIX_PTR, N_MEAS_OF_KF, N_STATES_OF_KF, InsFlow::new_flow_measurement, OF_ANGLE_DOT_IND, OF_ANGLE_IND, OF_DIV_FLOW_IND, OF_DRAG, OF_LAT_FLOW_IND, OF_LAT_FLOW_X_IND, OF_N_ROTORS, OF_P, of_prev_time, OF_Q, OF_R, OF_RATE_IND, OF_THETA_IND, OF_THRUST_BIAS, OF_THRUST_BIAS_IND, of_time, OF_TWO_DIM, OF_USE_GYROS, OF_V_IND, OF_VX_IND, OF_X, OF_Z_DOT_IND, OF_Z_IND, InsFlow::optical_flow_x, InsFlow::optical_flow_y, P, PAR_IX, PAR_KD, PAR_MASS, PAR_PRED_ROLL_3, parameters, PREDICT_GYROS, print_ins_flow_state(), print_true_state(), reset_filter, InsFlow::RPM, RPM_FACTORS, run_filter, stabilization, InsFlow::thrust_factor, and thrust_factor.
Here is the call graph for this function:
|
extern |
Definition at line 190 of file ins_flow.c.
Referenced by ins_flow_init(), send_ins_flow(), and set_body_state_from_quat().
|
extern |
Definition at line 191 of file ins_flow.c.
Referenced by ins_flow_init(), send_ins_flow(), and set_body_state_from_quat().
|
extern |
Definition at line 172 of file ins_flow.c.
Referenced by gps_cb(), ins_flow_update(), ins_reset_filter(), print_ins_flow_state(), send_ins_flow(), and set_body_state_from_quat().
|
extern |
Definition at line 184 of file ins_flow.c.
Referenced by ins_flow_init(), and ins_flow_update().
|
extern |
Definition at line 186 of file ins_flow.c.
Referenced by ins_flow_init(), and ins_flow_update().
|
extern |
Definition at line 188 of file ins_flow.c.
Referenced by ins_flow_update(), and send_ins_flow().
|
extern |
Definition at line 185 of file ins_flow.c.
Referenced by gps_cb(), ins_flow_init(), send_ins_flow(), and set_body_state_from_quat().