|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "ins_flow.h"#include "modules/core/abi.h"#include "generated/airframe.h"#include "mcu_periph/sys_time.h"#include "autopilot.h"#include "math/pprz_algebra_float.h"#include "generated/flight_plan.h"#include "modules/actuators/motor_mixing.h"#include "stabilization.h"#include <stdio.h>#include "modules/datalink/telemetry.h"#include "state.h" Include dependency graph for ins_flow.c:
Include dependency graph for ins_flow.c:Go to the source code of this file.
Data Structures | |
| struct | InsFlow |
Macros | |
| #define | DEBUG_INS_FLOW 0 |
| #define | DEBUG_PRINT(...) |
| #define | DEBUG_MAT_PRINT(...) |
| #define | AHRS_ICQ_OUTPUT_ENABLED TRUE |
| #define | INS_FLOW_GYRO_ID ABI_BROADCAST |
| #define | INS_FLOW_ACCEL_ID ABI_BROADCAST |
| #define | INS_FLOW_IMU_ID ABI_BROADCAST |
| #define | INS_FLOW_GPS_ID GPS_MULTI_ID |
| #define | INS_OPTICAL_FLOW_ID ABI_BROADCAST |
| #define | INS_RPM_ID ABI_BROADCAST |
| #define | MOMENT_DELAY 20 |
| #define | OF_N_ROTORS 4 |
| #define | USE_STANDARD_PARAMS 0 |
| #define | PAR_IX 0 |
| #define | PAR_MASS 1 |
| #define | PAR_BASE 2 |
| #define | PAR_K0 3 |
| #define | PAR_K1 4 |
| #define | PAR_K2 5 |
| #define | PAR_K3 6 |
| #define | PAR_R0 7 |
| #define | PAR_R1 8 |
| #define | PAR_Q0 9 |
| #define | PAR_Q1 10 |
| #define | PAR_Q2 11 |
| #define | PAR_Q3 12 |
| #define | PAR_Q4 13 |
| #define | PAR_P0 14 |
| #define | PAR_P1 15 |
| #define | PAR_P2 16 |
| #define | PAR_P3 17 |
| #define | PAR_P4 18 |
| #define | PAR_KD 19 |
| #define | PAR_Q_TB 20 |
| #define | PAR_P_TB 21 |
| #define | PAR_PRED_ROLL_1 22 |
| #define | PAR_PRED_ROLL_2 23 |
| #define | PAR_PRED_ROLL_3 24 |
| struct InsFlow |
Definition at line 133 of file ins_flow.c.
Collaboration diagram for InsFlow:| Data Fields | ||
|---|---|---|
| float | divergence | |
| float | lp_gyro_bias_pitch | |
| float | lp_gyro_bias_roll | |
| float | lp_gyro_pitch | |
| float | lp_gyro_roll | |
| float | lp_roll_command | |
| float | lp_thrust | |
| struct NedCoor_i | ltp_accel | |
| struct LtpDef_i | ltp_def | |
| bool | ltp_initialized | |
| struct NedCoor_i | ltp_pos | |
| struct NedCoor_i | ltp_speed | |
| bool | new_flow_measurement | |
| float | optical_flow_x | |
| float | optical_flow_y | |
| uint16_t | RPM[8] | |
| uint8_t | RPM_num_act | |
| float | thrust_factor | |
| float | vision_time | |
Definition at line 62 of file ins_flow.c.
| #define DEBUG_INS_FLOW 0 |
Definition at line 49 of file ins_flow.c.
| #define DEBUG_MAT_PRINT | ( | ... | ) |
Definition at line 58 of file ins_flow.c.
| #define DEBUG_PRINT | ( | ... | ) |
Definition at line 57 of file ins_flow.c.
| #define INS_FLOW_ACCEL_ID ABI_BROADCAST |
Definition at line 74 of file ins_flow.c.
| #define INS_FLOW_GPS_ID GPS_MULTI_ID |
Definition at line 87 of file ins_flow.c.
| #define INS_FLOW_GYRO_ID ABI_BROADCAST |
Definition at line 68 of file ins_flow.c.
| #define INS_FLOW_IMU_ID ABI_BROADCAST |
Definition at line 80 of file ins_flow.c.
| #define INS_OPTICAL_FLOW_ID ABI_BROADCAST |
Definition at line 93 of file ins_flow.c.
| #define INS_RPM_ID ABI_BROADCAST |
Definition at line 99 of file ins_flow.c.
| #define MOMENT_DELAY 20 |
Definition at line 168 of file ins_flow.c.
| #define OF_N_ROTORS 4 |
Definition at line 177 of file ins_flow.c.
| #define PAR_BASE 2 |
Definition at line 257 of file ins_flow.c.
| #define PAR_IX 0 |
Definition at line 255 of file ins_flow.c.
| #define PAR_K0 3 |
Definition at line 258 of file ins_flow.c.
| #define PAR_K1 4 |
Definition at line 259 of file ins_flow.c.
| #define PAR_K2 5 |
Definition at line 260 of file ins_flow.c.
| #define PAR_K3 6 |
Definition at line 261 of file ins_flow.c.
| #define PAR_KD 19 |
Definition at line 274 of file ins_flow.c.
| #define PAR_MASS 1 |
Definition at line 256 of file ins_flow.c.
| #define PAR_P0 14 |
Definition at line 269 of file ins_flow.c.
| #define PAR_P1 15 |
Definition at line 270 of file ins_flow.c.
| #define PAR_P2 16 |
Definition at line 271 of file ins_flow.c.
| #define PAR_P3 17 |
Definition at line 272 of file ins_flow.c.
| #define PAR_P4 18 |
Definition at line 273 of file ins_flow.c.
| #define PAR_P_TB 21 |
Definition at line 276 of file ins_flow.c.
| #define PAR_PRED_ROLL_1 22 |
Definition at line 277 of file ins_flow.c.
| #define PAR_PRED_ROLL_2 23 |
Definition at line 278 of file ins_flow.c.
| #define PAR_PRED_ROLL_3 24 |
Definition at line 279 of file ins_flow.c.
| #define PAR_Q0 9 |
Definition at line 264 of file ins_flow.c.
| #define PAR_Q1 10 |
Definition at line 265 of file ins_flow.c.
| #define PAR_Q2 11 |
Definition at line 266 of file ins_flow.c.
| #define PAR_Q3 12 |
Definition at line 267 of file ins_flow.c.
| #define PAR_Q4 13 |
Definition at line 268 of file ins_flow.c.
| #define PAR_Q_TB 20 |
Definition at line 275 of file ins_flow.c.
| #define PAR_R0 7 |
Definition at line 262 of file ins_flow.c.
| #define PAR_R1 8 |
Definition at line 263 of file ins_flow.c.
| #define USE_STANDARD_PARAMS 0 |
Definition at line 194 of file ins_flow.c.
|
static |
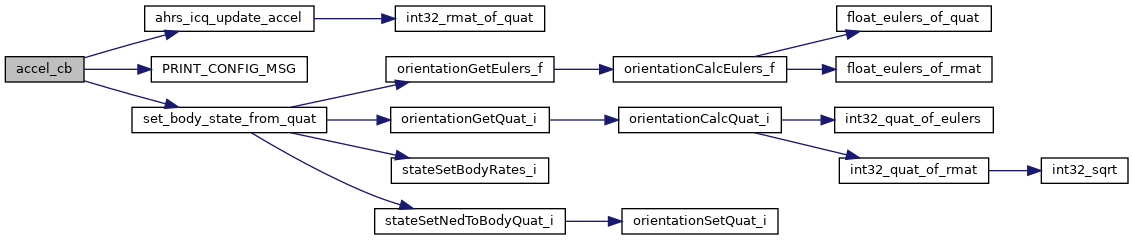
Definition at line 1372 of file ins_flow.c.
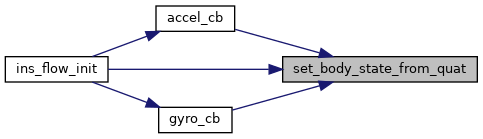
References ahrs_icq, ahrs_icq_update_accel(), foo, AhrsIntCmplQuat::is_aligned, PRINT_CONFIG_MSG(), PRINT_CONFIG_VAR(), and set_body_state_from_quat().
Referenced by ins_flow_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
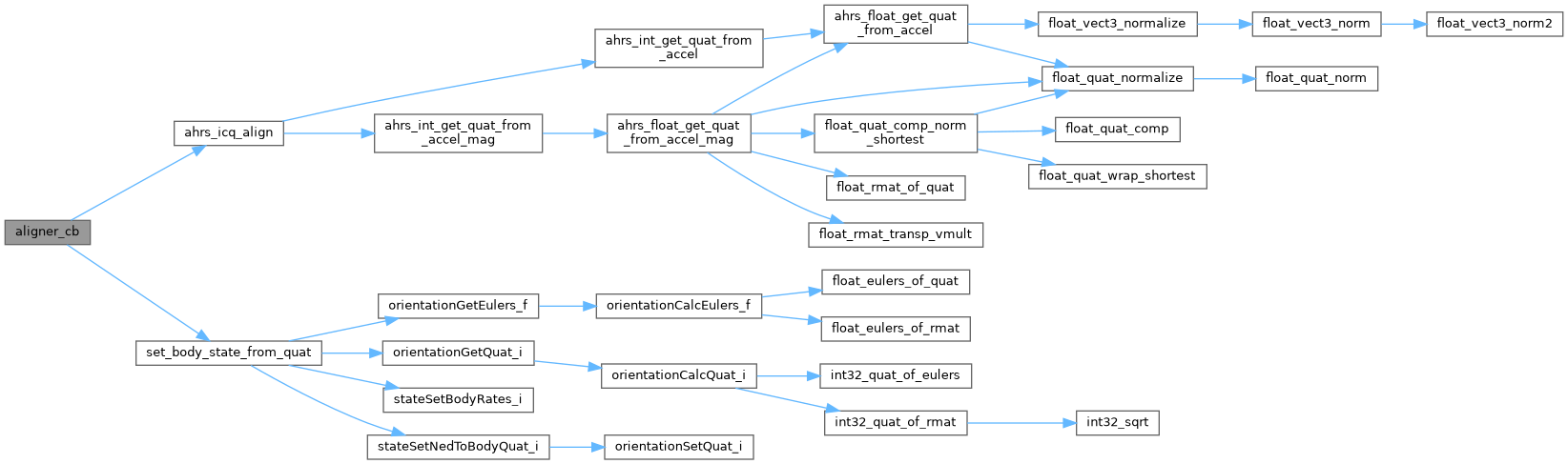
static |
Definition at line 1527 of file ins_flow.c.
References ahrs_icq, ahrs_icq_align(), AhrsIntCmplQuat::is_aligned, and set_body_state_from_quat().
Referenced by ins_flow_init().
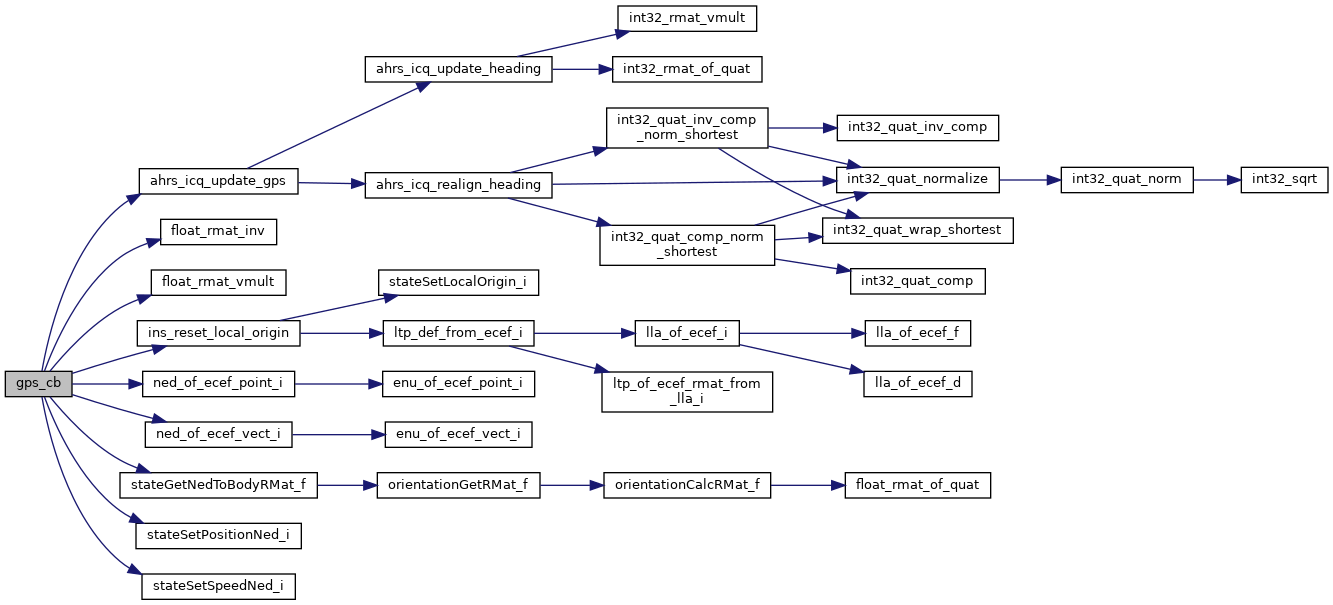
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1455 of file ins_flow.c.
References ahrs_icq_update_gps(), CONSTANT_ALT_FILTER, float_rmat_inv(), float_rmat_vmult(), foo, GPS_FIX_3D, ins_flow, INS_RESET_REF, INT32_POS_OF_CM_DEN, INT32_POS_OF_CM_NUM, INT32_SPEED_OF_CM_S_DEN, INT32_SPEED_OF_CM_S_NUM, INT32_VECT3_SCALE_2, InsFlow::ltp_def, InsFlow::ltp_initialized, InsFlow::ltp_pos, InsFlow::ltp_speed, ned_of_ecef_point_i(), ned_of_ecef_vect_i(), OF_V_IND, OF_X, OF_Z_IND, reset_cb(), stateGetNedToBodyRMat_f(), stateSetPositionNed_i(), stateSetSpeedNed_i(), use_filter, USE_HEIGHT, USE_VELOCITY, FloatVect3::x, NedCoor_i::y, and NedCoor_i::z.
Referenced by ins_flow_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
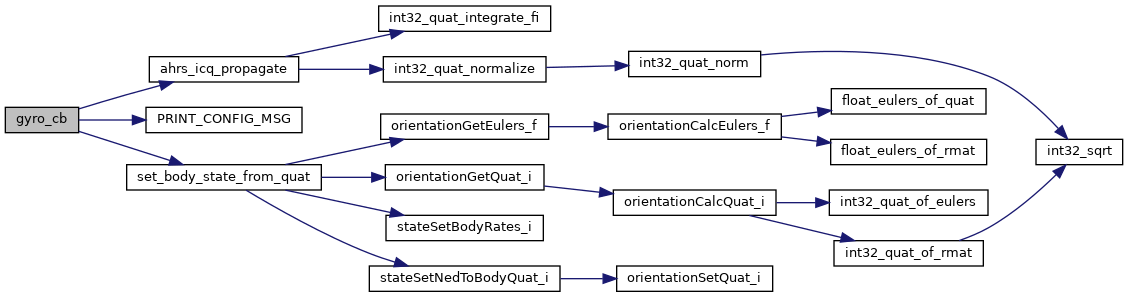
static |
Definition at line 1339 of file ins_flow.c.
References ahrs_icq, ahrs_icq_last_stamp, ahrs_icq_propagate(), AHRS_ICQ_RUNNING, AHRS_PROPAGATE_FREQUENCY, foo, ins_flow, AhrsIntCmplQuat::is_aligned, lp_factor, InsFlow::lp_gyro_pitch, InsFlow::lp_gyro_roll, Int32Rates::p, PRINT_CONFIG_MSG(), PRINT_CONFIG_VAR(), Int32Rates::q, set_body_state_from_quat(), and AhrsIntCmplQuat::status.
Referenced by ins_flow_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 1443 of file ins_flow.c.
References foo, ins_flow, act_feedback_t::rpm, InsFlow::RPM, and InsFlow::RPM_num_act.
Referenced by ins_flow_init().
Here is the caller graph for this function:Definition at line 532 of file ins_flow.c.
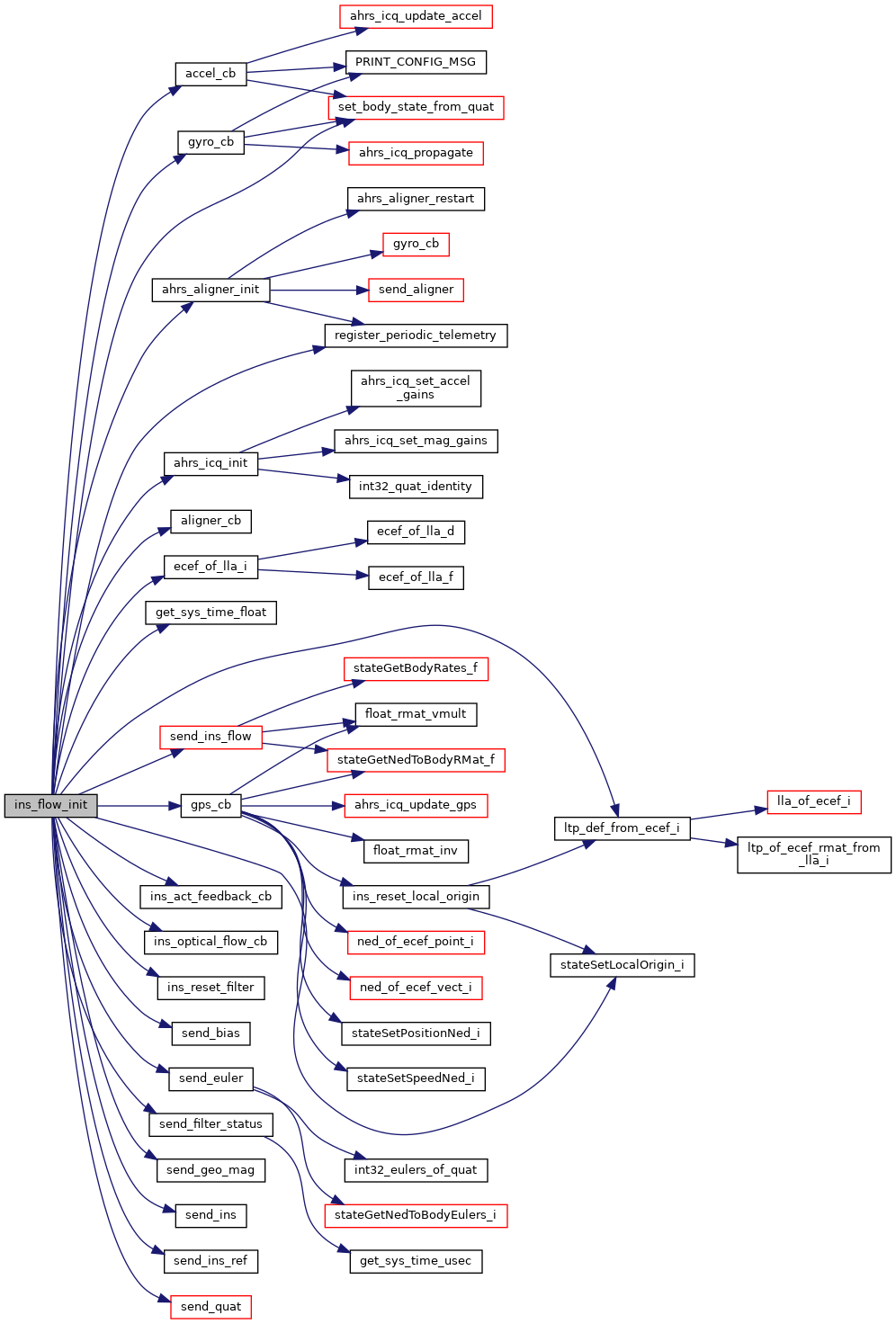
References ABI_BROADCAST, accel_cb(), accel_ev, ahrs_aligner_init(), ahrs_icq_init(), aligner_cb(), aligner_ev, CONSTANT_ALT_FILTER, DefaultPeriodic, E, ecef_of_lla_i(), foo, get_sys_time_float(), gps_cb(), gps_ev, GT_phi, GT_theta, gyro_cb(), gyro_ev, LtpDef_i::hmsl, ins_act_feedback_cb(), ins_act_feedback_ev, ins_flow, INS_FLOW_ACCEL_ID, INS_FLOW_GPS_ID, INS_FLOW_GYRO_ID, INS_FLOW_IMU_ID, ins_optical_flow_cb(), ins_optical_flow_ev, INS_OPTICAL_FLOW_ID, ins_reset_filter(), INS_RPM_ID, LlaCoor_i::lat, lp_factor, lp_factor_strong, InsFlow::lp_gyro_bias_pitch, InsFlow::lp_gyro_bias_roll, InsFlow::lp_gyro_pitch, InsFlow::lp_gyro_roll, InsFlow::lp_roll_command, InsFlow::lp_thrust, ltp_def, InsFlow::ltp_def, ltp_def_from_ecef_i(), InsFlow::ltp_initialized, moment_ind, N_MEAS_OF_KF, InsFlow::new_flow_measurement, OF_ANGLE_DOT_IND, OF_ANGLE_IND, OF_DIV_FLOW_IND, OF_LAT_FLOW_IND, OF_LAT_FLOW_X_IND, of_prev_time, OF_Q, OF_R, OF_RATE_IND, OF_THETA_IND, OF_THRUST_BIAS, OF_THRUST_BIAS_IND, of_time, OF_TWO_DIM, OF_V_IND, OF_VX_IND, OF_Z_DOT_IND, OF_Z_IND, PAR_K0, PAR_K1, PAR_K2, PAR_K3, PAR_Q0, PAR_Q1, PAR_Q2, PAR_Q3, PAR_Q4, PAR_Q_TB, PAR_R0, PAR_R1, parameters, register_periodic_telemetry(), reset_cb(), reset_ev, reset_filter, RPM_FACTORS, run_filter, send_bias(), send_euler(), send_filter_status(), send_geo_mag(), send_ins(), send_ins_flow(), send_ins_ref(), send_quat(), set_body_state_from_quat(), stateSetLocalOrigin_i(), InsFlow::thrust_factor, and use_filter.
Here is the call graph for this function:Definition at line 725 of file ins_flow.c.
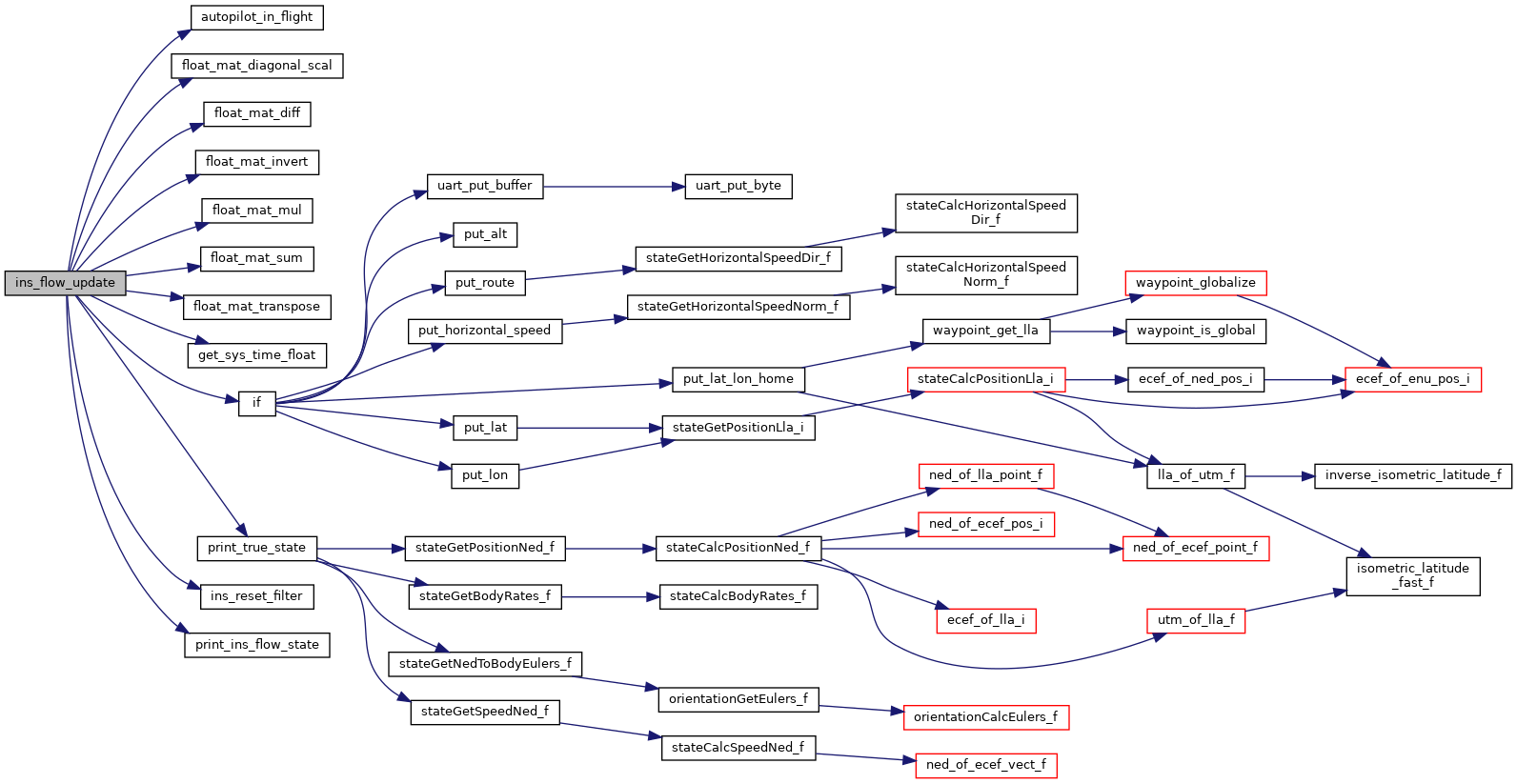
References autopilot_in_flight(), Stabilization::cmd, CONSTANT_ALT_FILTER, DEBUG_INS_FLOW, DEBUG_MAT_PRINT, DEBUG_PRINT, InsFlow::divergence, E, float_mat_diagonal_scal(), float_mat_diff(), float_mat_invert(), float_mat_mul(), float_mat_sum(), float_mat_transpose(), foo, g, get_sys_time_float(), H, ins_flow, ins_reset_filter(), K, lp_factor_strong, InsFlow::lp_gyro_bias_pitch, InsFlow::lp_gyro_bias_roll, InsFlow::lp_gyro_pitch, InsFlow::lp_gyro_roll, InsFlow::lp_roll_command, InsFlow::lp_thrust, MAKE_MATRIX_PTR, N_MEAS_OF_KF, N_STATES_OF_KF, InsFlow::new_flow_measurement, OF_ANGLE_DOT_IND, OF_ANGLE_IND, OF_DIV_FLOW_IND, OF_DRAG, OF_LAT_FLOW_IND, OF_LAT_FLOW_X_IND, OF_N_ROTORS, OF_P, of_prev_time, OF_Q, OF_R, OF_RATE_IND, OF_THETA_IND, OF_THRUST_BIAS, OF_THRUST_BIAS_IND, of_time, OF_TWO_DIM, OF_USE_GYROS, OF_V_IND, OF_VX_IND, OF_X, OF_Z_DOT_IND, OF_Z_IND, InsFlow::optical_flow_x, InsFlow::optical_flow_y, P, PAR_IX, PAR_KD, PAR_MASS, PAR_PRED_ROLL_3, parameters, PREDICT_GYROS, print_ins_flow_state(), print_true_state(), reset_filter, InsFlow::RPM, RPM_FACTORS, run_filter, stabilization, InsFlow::thrust_factor, and thrust_factor.
Here is the call graph for this function:| void ins_optical_flow_cb | ( | uint8_t sender_id | UNUSED, |
| uint32_t | stamp, | ||
| int32_t flow_x | UNUSED, | ||
| int32_t flow_y | UNUSED, | ||
| int32_t flow_der_x | UNUSED, | ||
| int32_t flow_der_y | UNUSED, | ||
| float quality | UNUSED, | ||
| float | size_divergence | ||
| ) |
Definition at line 668 of file ins_flow.c.
References InsFlow::divergence, foo, ins_flow, InsFlow::new_flow_measurement, InsFlow::optical_flow_x, InsFlow::optical_flow_y, and InsFlow::vision_time.
Referenced by ins_flow_init().
Here is the caller graph for this function:Definition at line 489 of file ins_flow.c.
References CONSTANT_ALT_FILTER, counter, foo, N_STATES_OF_KF, OF_ANGLE_DOT_IND, OF_ANGLE_IND, OF_P, OF_THETA_IND, OF_THRUST_BIAS, OF_THRUST_BIAS_IND, OF_TWO_DIM, OF_V_IND, OF_VX_IND, OF_X, OF_Z_DOT_IND, OF_Z_IND, PAR_P0, PAR_P1, PAR_P2, PAR_P3, PAR_P4, PAR_P_TB, and parameters.
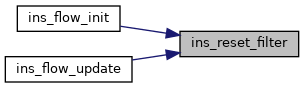
Referenced by ins_flow_init(), and ins_flow_update().
Here is the caller graph for this function:Definition at line 687 of file ins_flow.c.
References CONSTANT_ALT_FILTER, foo, OF_ANGLE_DOT_IND, OF_ANGLE_IND, OF_THETA_IND, OF_THRUST_BIAS, OF_THRUST_BIAS_IND, OF_TWO_DIM, OF_V_IND, OF_VX_IND, OF_X, OF_Z_DOT_IND, and OF_Z_IND.
Referenced by ins_flow_update().
Here is the caller graph for this function:Definition at line 712 of file ins_flow.c.
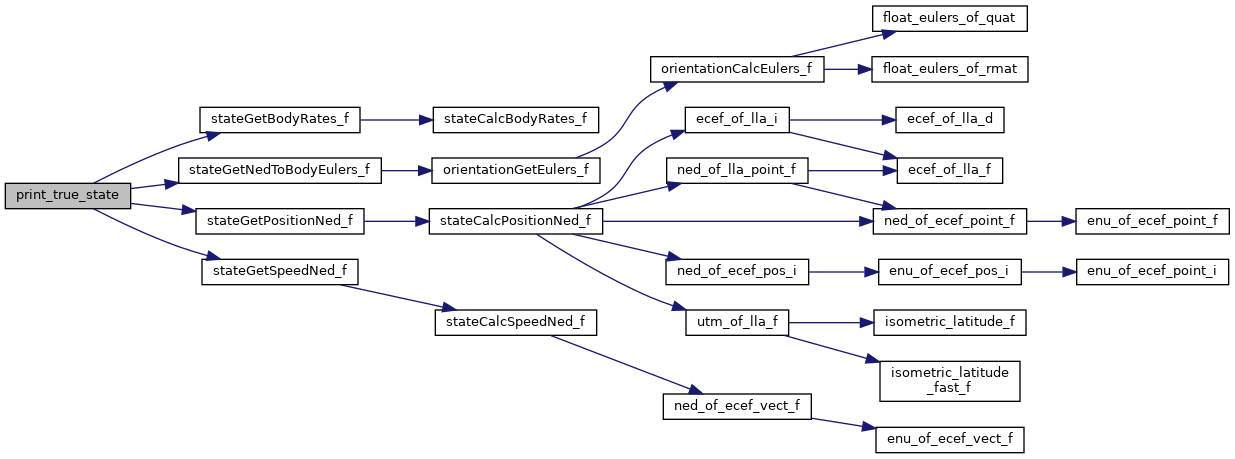
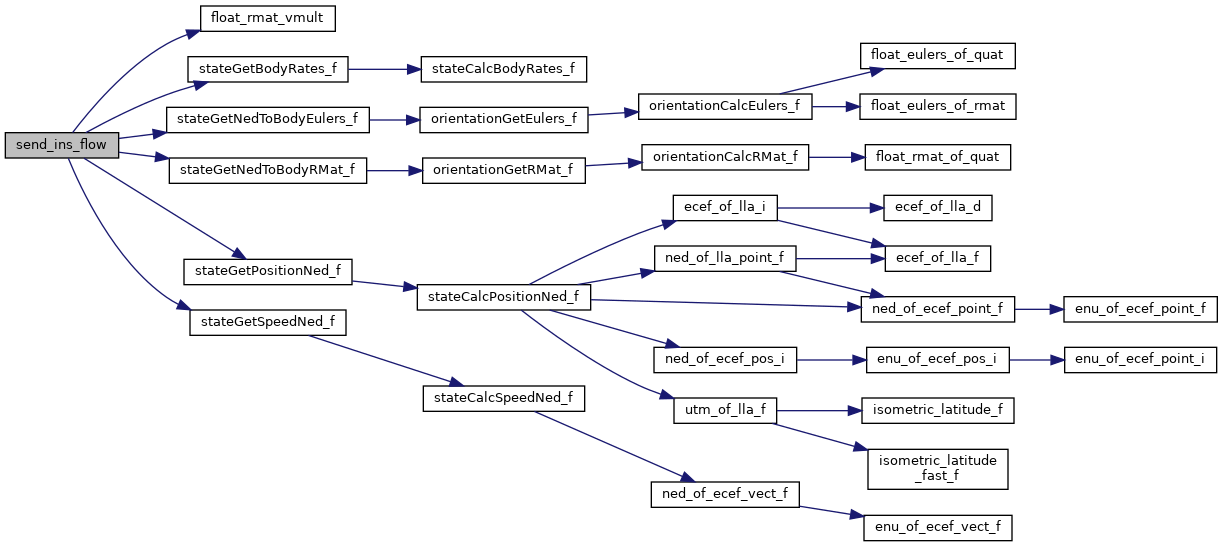
References foo, FloatRates::p, FloatEulers::phi, stateGetBodyRates_f(), stateGetNedToBodyEulers_f(), stateGetPositionNed_f(), stateGetSpeedNed_f(), and NedCoor_f::z.
Referenced by ins_flow_update().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 657 of file ins_flow.c.
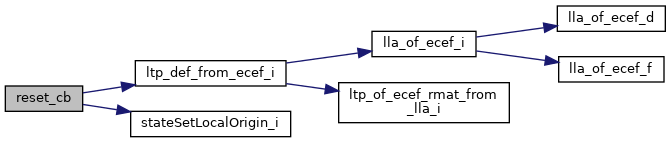
References LlaCoor_i::alt, GpsState::ecef_pos, foo, gps, LtpDef_i::hmsl, GpsState::hmsl, ins_flow, INS_RESET_REF, LtpDef_i::lla, GpsState::lla_pos, InsFlow::ltp_def, ltp_def_from_ecef_i(), InsFlow::ltp_initialized, and stateSetLocalOrigin_i().
Referenced by gps_cb(), and ins_flow_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 331 of file ins_flow.c.
References ahrs_flow_id, ahrs_icq, dev, foo, AhrsIntCmplQuat::gyro_bias, Int32Rates::p, Int32Rates::q, and Int32Rates::r.
Referenced by ins_flow_init().
Here is the caller graph for this function:
|
static |
Definition at line 315 of file ins_flow.c.
References ahrs_flow_id, ahrs_icq, dev, foo, int32_eulers_of_quat(), AhrsIntCmplQuat::ltp_to_body_quat, Int32Eulers::phi, Int32Eulers::psi, stateGetNedToBodyEulers_i(), and Int32Eulers::theta.
Referenced by ins_flow_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 348 of file ins_flow.c.
References ahrs_flow_id, ahrs_icq, ahrs_icq_last_stamp, dev, foo, get_sys_time_usec(), AhrsIntCmplQuat::is_aligned, and val.
Referenced by ins_flow_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 338 of file ins_flow.c.
References ahrs_flow_id, ahrs_icq, dev, foo, MAG_FLOAT_OF_BFP, AhrsIntCmplQuat::mag_h, FloatVect3::x, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by ins_flow_init().
Here is the caller graph for this function:
|
static |
Definition at line 360 of file ins_flow.c.
References dev, foo, ins_flow, InsFlow::ltp_accel, InsFlow::ltp_pos, InsFlow::ltp_speed, NedCoor_i::x, NedCoor_i::y, and NedCoor_i::z.
Referenced by ins_flow_init().
Here is the caller graph for this function:
|
static |
Definition at line 390 of file ins_flow.c.
References CONSTANT_ALT_FILTER, dev, float_rmat_vmult(), foo, g, GT_phi, GT_theta, ins_flow, InsFlow::lp_gyro_bias_pitch, InsFlow::lp_gyro_bias_roll, InsFlow::lp_gyro_pitch, InsFlow::lp_gyro_roll, OF_ANGLE_DOT_IND, OF_ANGLE_IND, OF_N_ROTORS, OF_THETA_IND, OF_THRUST_BIAS, OF_THRUST_BIAS_IND, OF_TWO_DIM, OF_V_IND, OF_VX_IND, OF_X, OF_Z_DOT_IND, OF_Z_IND, FloatRates::p, p, PAR_MASS, parameters, FloatEulers::phi, FloatRates::q, InsFlow::RPM, RPM_FACTORS, stateGetBodyRates_f(), stateGetNedToBodyEulers_f(), stateGetNedToBodyRMat_f(), stateGetPositionNed_f(), stateGetSpeedNed_f(), FloatEulers::theta, thrust_factor, USE_ANGLE, use_filter, FloatVect3::x, FloatVect3::z, and NedCoor_f::z.
Referenced by ins_flow_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 376 of file ins_flow.c.
References LlaCoor_i::alt, dev, LtpDef_i::ecef, foo, LtpDef_i::hmsl, ins_flow, LlaCoor_i::lat, LtpDef_i::lla, LlaCoor_i::lon, InsFlow::ltp_def, InsFlow::ltp_initialized, EcefCoor_i::x, EcefCoor_i::y, and EcefCoor_i::z.
Referenced by ins_flow_init().
Here is the caller graph for this function:
|
static |
Definition at line 299 of file ins_flow.c.
References ahrs_flow_id, ahrs_icq, dev, foo, AhrsIntCmplQuat::ltp_to_body_quat, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, stateGetNedToBodyQuat_i(), and AhrsIntCmplQuat::weight.
Referenced by ins_flow_init().
Here is the call graph for this function: Here is the caller graph for this function:Rotate angles and rates from imu to body frame and set state.
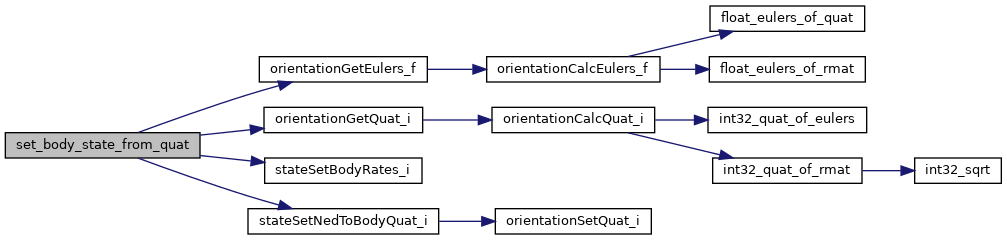
Definition at line 1398 of file ins_flow.c.
References ahrs_icq, AhrsIntCmplQuat::body_rate, foo, GT_phi, GT_theta, AhrsIntCmplQuat::ltp_to_body_quat, OF_ANGLE_IND, OF_THETA_IND, OF_TWO_DIM, OF_X, orientationGetEulers_f(), orientationGetQuat_i(), ORREP_EULER_F, ORREP_QUAT_I, FloatEulers::phi, OrientationReps::quat_i, stateSetBodyRates_i(), stateSetNedToBodyQuat_i(), OrientationReps::status, FloatEulers::theta, USE_ANGLE, and use_filter.
Referenced by accel_cb(), aligner_cb(), gyro_cb(), and ins_flow_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 105 of file ins_flow.c.
Referenced by ins_flow_init().
|
static |
Component ID for FLOW.
Definition at line 129 of file ins_flow.c.
Referenced by send_bias(), send_euler(), send_filter_status(), send_geo_mag(), and send_quat().
|
static |
Definition at line 128 of file ins_flow.c.
Referenced by gyro_cb(), and send_filter_status().
|
static |
Definition at line 109 of file ins_flow.c.
Referenced by ins_flow_init().
| uint32_t counter |
Definition at line 187 of file ins_flow.c.
Referenced by actuators_esc32_play_melody(), airspeed_otf_parse(), gec_decrypt_message(), gec_encrypt_message(), high_speed_logger_spi_link_periodic(), ins_mekf_wind_wrapper_init(), ins_reset_filter(), logger_file_start(), motor_mixing_run_spinup(), nav_fish_velocity_run(), open_log(), periodic_light(), save_shot_on_disk(), stereo_avoid_run(), video_usb_logger_start(), and wind_estimator_init().
|
static |
Definition at line 106 of file ins_flow.c.
Referenced by ins_flow_init().
| float GT_phi |
Definition at line 190 of file ins_flow.c.
Referenced by ins_flow_init(), send_ins_flow(), and set_body_state_from_quat().
| float GT_theta |
Definition at line 191 of file ins_flow.c.
Referenced by ins_flow_init(), send_ins_flow(), and set_body_state_from_quat().
|
static |
Definition at line 104 of file ins_flow.c.
Referenced by ins_flow_init().
|
static |
Definition at line 108 of file ins_flow.c.
Referenced by ins_flow_init().
| struct InsFlow ins_flow |
Definition at line 164 of file ins_flow.c.
Referenced by gps_cb(), gyro_cb(), ins_act_feedback_cb(), ins_flow_init(), ins_flow_update(), ins_optical_flow_cb(), reset_cb(), send_ins(), send_ins_flow(), and send_ins_ref().
|
static |
Definition at line 107 of file ins_flow.c.
Referenced by ins_flow_init().
| float lp_factor |
Definition at line 182 of file ins_flow.c.
Referenced by gyro_cb(), horizontal_ctrl_module_run(), ins_flow_init(), PID_divergence_control(), PID_flow_control(), update_errors(), vertical_ctrl_module_run(), and vertical_ctrl_module_run().
| float lp_factor_strong |
Definition at line 183 of file ins_flow.c.
Referenced by ins_flow_init(), and ins_flow_update().
| int moment_ind |
Definition at line 170 of file ins_flow.c.
Referenced by ins_flow_init().
| float moments[MOMENT_DELAY] = {0.} |
Definition at line 169 of file ins_flow.c.
Referenced by evaluate_obm_moments(), and find_contour().
| float OF_P[N_STATES_OF_KF][N_STATES_OF_KF] = {{0.}} |
Definition at line 174 of file ins_flow.c.
Referenced by ins_flow_update(), and ins_reset_filter().
| float of_prev_time |
Definition at line 181 of file ins_flow.c.
Referenced by ins_flow_init(), and ins_flow_update().
| float OF_Q[N_STATES_OF_KF][N_STATES_OF_KF] = {{0.}} |
Definition at line 173 of file ins_flow.c.
Referenced by ins_flow_init(), and ins_flow_update().
| float OF_R[N_MEAS_OF_KF][N_MEAS_OF_KF] = {{0.}} |
Definition at line 175 of file ins_flow.c.
Referenced by ins_flow_init(), and ins_flow_update().
| float of_time |
Definition at line 180 of file ins_flow.c.
Referenced by ins_flow_init(), and ins_flow_update().
| float OF_X[N_STATES_OF_KF] = {0.} |
Definition at line 172 of file ins_flow.c.
Referenced by gps_cb(), ins_flow_update(), ins_reset_filter(), print_ins_flow_state(), send_ins_flow(), and set_body_state_from_quat().
| float parameters[22] = {0.219033, 0.376572, 0.184002, 0.096388, 0.240843, 0.172390, 0.133111, 0.495885, 0.357086, 0.233624, 0.125611, 1.661682, 0.136735, 2.812652, 0.715887, 0.166932, 0.371409, 1.043920, 0.840683, 0.567703, 0.192238, 0.301966} |
Definition at line 249 of file ins_flow.c.
Referenced by fit_linear_model(), fit_linear_model_OF(), fit_linear_model_prior(), ins_flow_init(), ins_flow_update(), ins_reset_filter(), and send_ins_flow().
|
static |
Definition at line 110 of file ins_flow.c.
Referenced by ins_flow_init().
| bool reset_filter |
Definition at line 184 of file ins_flow.c.
Referenced by ins_flow_init(), and ins_flow_update().
| float RPM_FACTORS[OF_N_ROTORS] |
Definition at line 178 of file ins_flow.c.
Referenced by ins_flow_init(), ins_flow_update(), and send_ins_flow().
| bool run_filter |
Definition at line 186 of file ins_flow.c.
Referenced by ins_flow_init(), and ins_flow_update().
| float thrust_factor |
Definition at line 188 of file ins_flow.c.
Referenced by ins_flow_update(), and send_ins_flow().
| int use_filter |
Definition at line 185 of file ins_flow.c.
Referenced by gps_cb(), ins_flow_init(), send_ins_flow(), and set_body_state_from_quat().