|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Filters altitude and climb rate for fixedwings. More...
 Include dependency graph for ins_alt_float.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ins_alt_float.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | InsAltFloat |
| Ins implementation state (altitude, float) More... | |
Functions | |
| void | ins_alt_float_init (void) |
| void | ins_alt_float_update_baro (float pressure) |
Variables | |
| struct InsAltFloat | ins_altf |
Filters altitude and climb rate for fixedwings.
Definition in file ins_alt_float.h.
| struct InsAltFloat |
Ins implementation state (altitude, float)
Definition at line 37 of file ins_alt_float.h.
| Data Fields | ||
|---|---|---|
| float | alt | estimated altitude above MSL in meters |
| float | alt_dot | estimated vertical speed in m/s (positive-up) |
| float | baro_alt | |
| bool | baro_initialized | |
| bool | origin_initialized | TRUE if UTM origin was initialized. |
| float | qfe | |
| bool | reset_alt_ref | flag to request reset of altitude reference to current alt |
Definition at line 101 of file ins_alt_float.c.
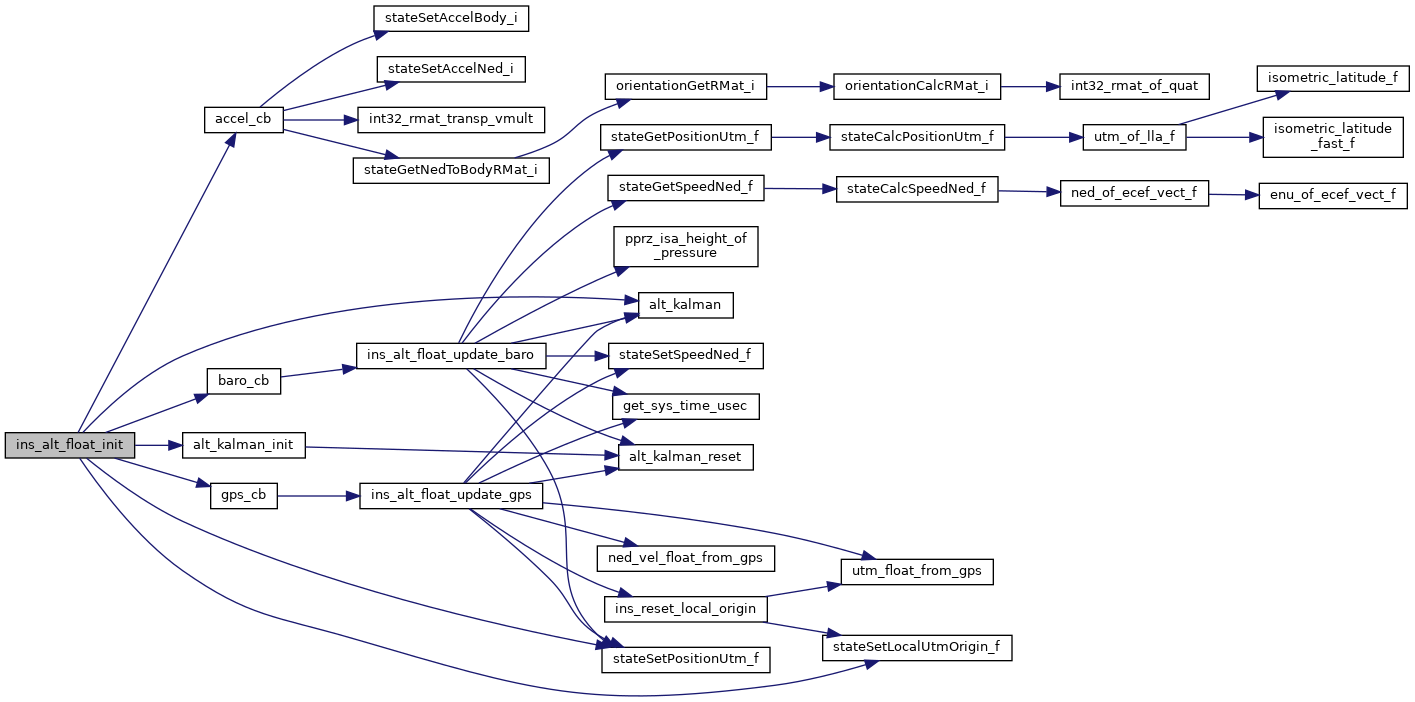
References ABI_BROADCAST, accel_cb(), accel_ev, alt_kalman(), alt_kalman_init(), InsAltFloat::baro_alt, baro_cb(), baro_ev, InsAltFloat::baro_initialized, foo, gps_cb(), gps_ev, INS_ALT_BARO_ID, INS_ALT_GPS_ID, INS_ALT_IMU_ID, ins_altf, nav_utm_east0, nav_utm_north0, nav_utm_zone0, InsAltFloat::origin_initialized, InsAltFloat::qfe, InsAltFloat::reset_alt_ref, reset_cb(), reset_ev, stateSetLocalUtmOrigin_f(), and stateSetPositionUtm_f().
Here is the call graph for this function:Definition at line 172 of file ins_alt_float.c.
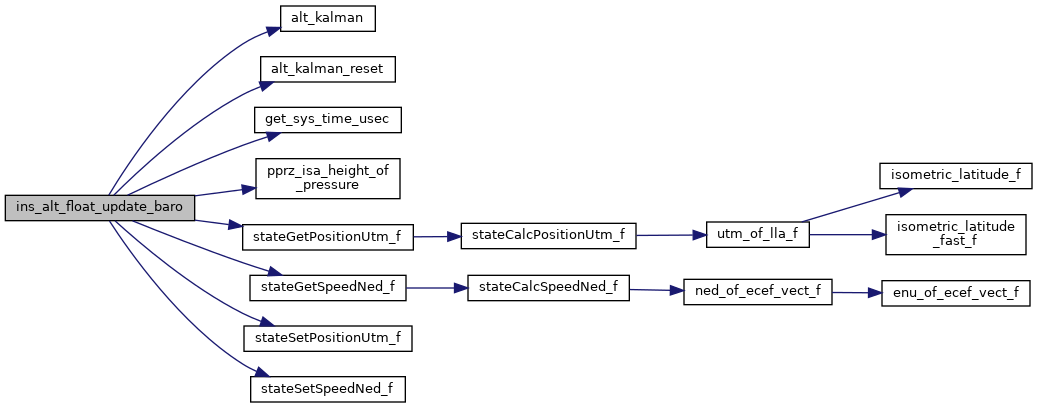
References InsAltFloat::alt, InsAltFloat::alt_dot, alt_kalman(), alt_kalman_reset(), InsAltFloat::baro_alt, InsAltFloat::baro_initialized, foo, get_sys_time_usec(), ground_alt, ins_altf, last_ts, pprz_isa_height_of_pressure(), InsAltFloat::qfe, InsAltFloat::reset_alt_ref, stateGetPositionUtm_f(), stateGetSpeedNed_f(), stateSetPositionUtm_f(), stateSetSpeedNed_f(), UTM_COPY, and NedCoor_f::z.
Referenced by baro_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 54 of file ins_alt_float.c.
Referenced by alt_kalman(), ins_alt_float_init(), ins_alt_float_update_baro(), ins_alt_float_update_gps(), reset_ref(), and reset_vertical_ref().