|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Extended vertical filter (in float). More...
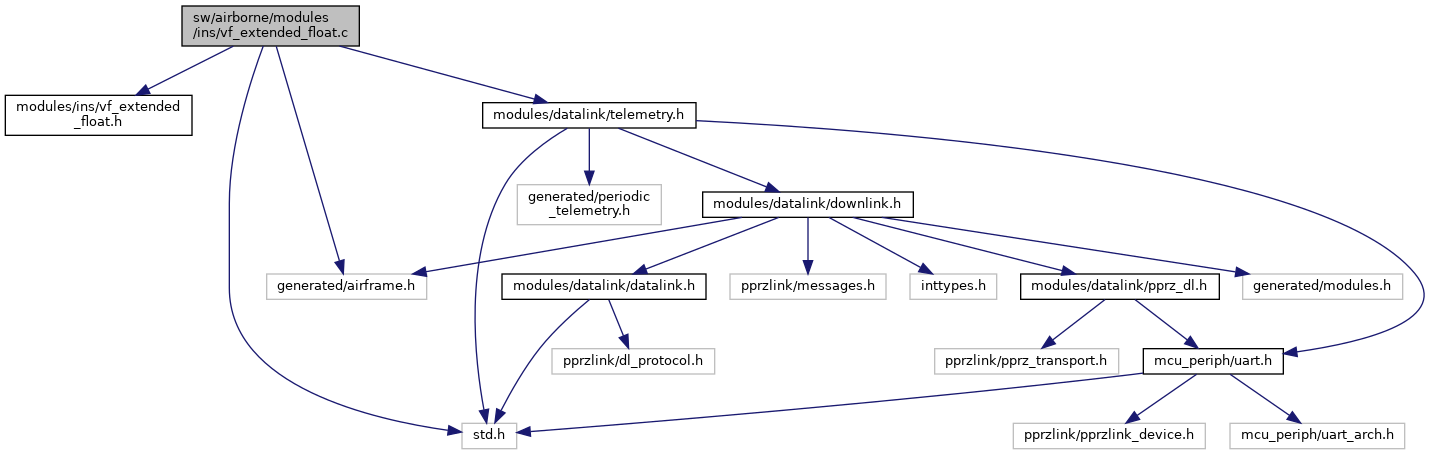
#include "modules/ins/vf_extended_float.h"#include "generated/airframe.h"#include "std.h"#include "modules/datalink/telemetry.h" Include dependency graph for vf_extended_float.c:
Include dependency graph for vf_extended_float.c:Go to the source code of this file.
Macros | |
| #define | DEBUG_VFF_EXTENDED 0 |
| #define | VFF_EXTENDED_INIT_PXX 1.0f |
| initial covariance diagonal | |
| #define | VFF_EXTENDED_ACCEL_NOISE 0.5f |
| process noise covariance Q | |
| #define | VFF_EXTENDED_R_BARO 2.f |
| Barometer confidence. | |
| #define | Qbiasbias 1e-6 |
| #define | Qoffoff 1e-4f |
| VFF_EXTENDED_NON_FLAT_GROUND removes the assumption of a flat ground and tries to estimate the height of the obstacles under the vehicle. | |
| #define | Qobsobs 0.f |
| #define | R_ALT 0.2f |
| #define | R_OBS_HEIGHT 8.f |
Functions | |
| void | vff_update_obs_height (float obs_height) |
| static void | send_vffe (struct transport_tx *trans, struct link_device *dev) |
| void | vff_init_zero (void) |
| void | vff_init (float init_z, float init_zdot, float init_accel_bias, float init_offset, float init_obs_height) |
| void | vff_propagate (float accel, float dt) |
| Propagate the filter in time. | |
| static void | update_biased_z_conf (float z_meas, float conf) |
| Update sensor "with" offset (baro, sonar). | |
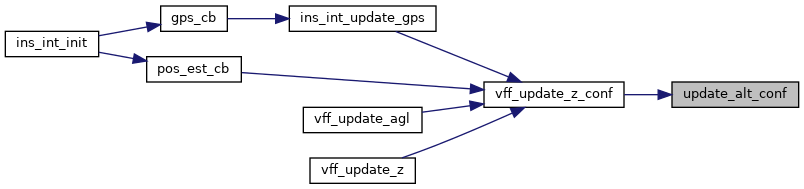
| static void | update_alt_conf (float z_meas, float conf) |
| Update sensor "without" offset (gps, sonar) H = [1 0 0 0 -1]; // state residual y = rangemeter - H * Xm; // covariance residual S = H*Pm*H' + R; // kalman gain K = Pm*H'*inv(S); // update state Xp = Xm + K*y; // update covariance Pp = Pm - K*H*Pm;. | |
| void | vff_update_z_conf (float z_meas, float conf) |
| void | vff_update_z (float z_meas) |
| void | vff_update_agl (float z_meas, float conf) |
| void | vff_update_baro_conf (float z_meas, float conf) |
| void | vff_update_baro (float z_meas) |
| static void | update_obs_height (float obs_height, float conf) |
| Update obstacle height. | |
| void | vff_realign (float z_meas) |
| static void | update_vz_conf (float vz, float conf) |
| void | vff_update_vz_conf (float vz_meas, float conf) |
Variables | |
| struct VffExtended | vff |
Extended vertical filter (in float).
Estimates altitude, vertical speed, accelerometer bias barometer offset and obstacle height.
X = [ z zdot accel_bias baro_offset obstacle_height ]
Definition in file vf_extended_float.c.
| #define DEBUG_VFF_EXTENDED 0 |
Definition at line 39 of file vf_extended_float.c.
| #define Qbiasbias 1e-6 |
Definition at line 65 of file vf_extended_float.c.
Definition at line 83 of file vf_extended_float.c.
VFF_EXTENDED_NON_FLAT_GROUND removes the assumption of a flat ground and tries to estimate the height of the obstacles under the vehicle.
This results in a barometer focused filter with the agl measurement used to slowly update the barometer offset. Over time, the obstacle height will tend towards zero, this will result in a relatively smooth transition over sort obstacles but will maintain a constant height above the true ground. If not defined the filter is agl measurement heavy with the result assuming the agl measurement is truth and is used to quickly update the barometer offset.
Definition at line 82 of file vf_extended_float.c.
Definition at line 86 of file vf_extended_float.c.
Definition at line 87 of file vf_extended_float.c.
process noise covariance Q
Definition at line 57 of file vf_extended_float.c.
| #define VFF_EXTENDED_INIT_PXX 1.0f |
initial covariance diagonal
Definition at line 52 of file vf_extended_float.c.
Barometer confidence.
Definition at line 62 of file vf_extended_float.c.
|
static |
Definition at line 96 of file vf_extended_float.c.
References VffExtended::bias, dev, foo, VffExtended::obs_height, VffExtended::offset, VffExtended::P, vff, VffExtended::z, VffExtended::z_meas, VffExtended::z_meas_baro, VffExtended::zdot, and VffExtended::zdotdot.
Referenced by vff_init(), and vff_propagate().
Here is the caller graph for this function:Update sensor "without" offset (gps, sonar) H = [1 0 0 0 -1]; // state residual y = rangemeter - H * Xm; // covariance residual S = H*Pm*H' + R; // kalman gain K = Pm*H'*inv(S); // update state Xp = Xm + K*y; // update covariance Pp = Pm - K*H*Pm;.
Definition at line 281 of file vf_extended_float.c.
References VffExtended::bias, foo, K, VffExtended::obs_height, VffExtended::offset, P, VffExtended::P, vff, VFF_STATE_SIZE, VffExtended::z, VffExtended::z_meas, and VffExtended::zdot.
Referenced by vff_update_z_conf().
Here is the caller graph for this function:Update sensor "with" offset (baro, sonar).
H = [1 0 0 -1 0]; // state residual y = rangemeter - H * Xm; // covariance residual S = H*Pm*H' + R; // kalman gain K = Pm*H'*inv(S); // update state Xp = Xm + K*y; // update covariance Pp = Pm - K*H*Pm;
Definition at line 236 of file vf_extended_float.c.
References VffExtended::bias, foo, K, VffExtended::obs_height, VffExtended::offset, P, VffExtended::P, vff, VFF_STATE_SIZE, vff_update_obs_height(), VffExtended::z, VffExtended::z_meas, VffExtended::z_meas_baro, and VffExtended::zdot.
Referenced by vff_update_baro_conf().
Here is the call graph for this function: Here is the caller graph for this function:Update obstacle height.
H = [0 0 0 0 1]; // state residual y = rangemeter - H * Xm; // covariance residual S = H*Pm*H' + R; // kalman gain K = Pm*H'*inv(S); // update state Xp = Xm + K*y; // update covariance Pp = Pm - K*H*Pm;
Definition at line 352 of file vf_extended_float.c.
References VffExtended::bias, foo, K, VffExtended::obs_height, VffExtended::offset, P, VffExtended::P, vff, VFF_STATE_SIZE, VffExtended::z, and VffExtended::zdot.
Referenced by vff_update_obs_height().
Here is the caller graph for this function:Definition at line 406 of file vf_extended_float.c.
References VffExtended::bias, foo, K, VffExtended::obs_height, VffExtended::offset, P, VffExtended::P, vff, VFF_STATE_SIZE, VffExtended::z, and VffExtended::zdot.
Referenced by vff_update_vz_conf().
Here is the caller graph for this function:| void vff_init | ( | float | init_z, |
| float | init_zdot, | ||
| float | init_accel_bias, | ||
| float | init_offset, | ||
| float | init_obs_height | ||
| ) |
Definition at line 127 of file vf_extended_float.c.
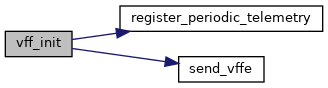
References VffExtended::accel_noise, VffExtended::bias, DefaultPeriodic, foo, VffExtended::obs_height, VffExtended::offset, VffExtended::P, R_ALT, VffExtended::r_alt, VffExtended::r_baro, R_OBS_HEIGHT, VffExtended::r_obs_height, register_periodic_telemetry(), send_vffe(), vff, VFF_EXTENDED_ACCEL_NOISE, VFF_EXTENDED_INIT_PXX, VFF_EXTENDED_R_BARO, VFF_STATE_SIZE, VffExtended::z, and VffExtended::zdot.
Referenced by vff_init_zero().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 107 of file vf_extended_float.c.
References vff_init().
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:Propagate the filter in time.
F = [ 1 dt -dt^2/2 0 0 0 1 -dt 0 0 0 0 1 0 0 0 0 0 1 0 0 0 0 0 1 ];
B = [ dt^2/2 dt 0 0 0]';
Q = [ Qzz 0 0 0 0 0 Qzdotzdot 0 0 0 0 0 Qbiasbias 0 0 0 0 0 0 Qoffoff 0 0 0 0 0 0 Qobsobs ];
Qzz = VFF_EXTENDED_ACCEL_NOISE * DT_VFILTER * DT_VFILTER / 2. Qzdotzdot = VFF_EXTENDED_ACCEL_NOISE * DT_VFILTER
Xk1 = F * Xk0 + B * accel;
Pk1 = F * Pk0 * F' + Q;
Definition at line 181 of file vf_extended_float.c.
References VffExtended::accel_noise, VffExtended::bias, DefaultChannel, DefaultDevice, foo, VffExtended::P, Qbiasbias, Qobsobs, Qoffoff, send_vffe(), vff, VffExtended::z, VffExtended::zdot, and VffExtended::zdotdot.
Referenced by ins_int_propagate().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 384 of file vf_extended_float.c.
References VffExtended::obs_height, VffExtended::offset, vff, VffExtended::z, VffExtended::z_meas, and VffExtended::zdot.
Referenced by baro_cb().
Here is the caller graph for this function:Definition at line 321 of file vf_extended_float.c.
References vff_update_z_conf(), and VffExtended::z_meas.
Here is the call graph for this function:Definition at line 333 of file vf_extended_float.c.
References VffExtended::r_baro, vff, vff_update_baro_conf(), and VffExtended::z_meas.
Referenced by baro_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 327 of file vf_extended_float.c.
References update_biased_z_conf(), and VffExtended::z_meas.
Referenced by vff_update_baro().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 379 of file vf_extended_float.c.
References VffExtended::obs_height, VffExtended::r_obs_height, update_obs_height(), and vff.
Referenced by update_biased_z_conf().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 433 of file vf_extended_float.c.
References foo, and update_vz_conf().
Referenced by ins_int_update_gps(), and vel_est_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 316 of file vf_extended_float.c.
References VffExtended::r_alt, vff, vff_update_z_conf(), and VffExtended::z_meas.
Here is the call graph for this function:Definition at line 310 of file vf_extended_float.c.
References update_alt_conf(), and VffExtended::z_meas.
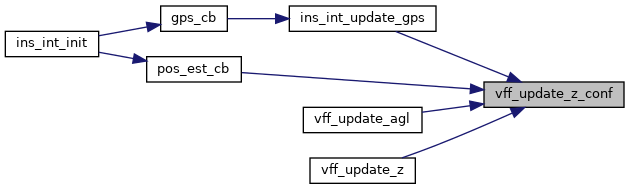
Referenced by ins_int_update_gps(), pos_est_cb(), vff_update_agl(), and vff_update_z().
Here is the call graph for this function: Here is the caller graph for this function:| struct VffExtended vff |
Definition at line 89 of file vf_extended_float.c.
Referenced by ins_update_from_vff(), send_vffe(), update_alt_conf(), update_biased_z_conf(), update_obs_height(), update_vz_conf(), vff_init(), vff_propagate(), vff_realign(), vff_update_baro(), vff_update_obs_height(), and vff_update_z().