|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Horizontal filter (x,y) to estimate position and velocity. More...
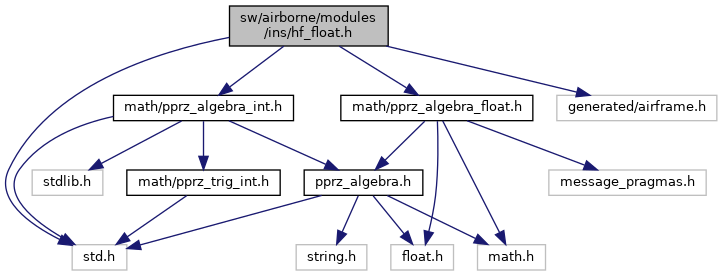
#include "std.h"#include "math/pprz_algebra_float.h"#include "math/pprz_algebra_int.h"#include "generated/airframe.h" Include dependency graph for hf_float.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for hf_float.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | HfilterFloat |
Macros | |
| #define | HFF_STATE_SIZE 3 |
Functions | |
| void | hff_init (float init_x, float init_xdot, float init_y, float init_ydot) |
| void | hff_propagate (void) |
| void | hff_update_gps (struct FloatVect2 *pos_ned, struct FloatVect2 *speed_ned) |
| void | hff_update_pos (struct FloatVect2 pos, struct FloatVect2 Rpos) |
| Update position. | |
| void | hff_update_vel (struct FloatVect2 vel, struct FloatVect2 Rvel) |
| void | hff_realign (struct FloatVect2 pos, struct FloatVect2 vel) |
Variables | |
| struct HfilterFloat | hff |
Horizontal filter (x,y) to estimate position and velocity.
Definition in file hf_float.h.
| struct HfilterFloat |
Definition at line 40 of file hf_float.h.
| Data Fields | ||
|---|---|---|
| uint16_t | lag_counter | |
| bool | rollback | |
| float | x | |
| float | xbias | |
| float | xdot | |
| float | xdotdot | |
| float | xP[HFF_STATE_SIZE][HFF_STATE_SIZE] | |
| float | y | |
| float | ybias | |
| float | ydot | |
| float | ydotdot | |
| float | yP[HFF_STATE_SIZE][HFF_STATE_SIZE] | |
| #define HFF_STATE_SIZE 3 |
Definition at line 38 of file hf_float.h.
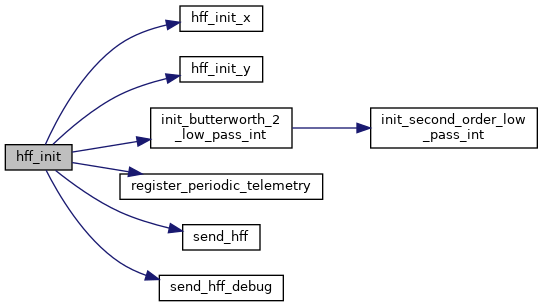
Definition at line 274 of file hf_float.c.
References AHRS_PROPAGATE_FREQUENCY, DefaultPeriodic, filter_x, filter_y, filter_z, foo, hff, HFF_DT, hff_init_x(), hff_init_y(), hff_lost_counter, HFF_LOST_LIMIT, hff_lost_limit, HFF_LOWPASS_CUTOFF_FREQUENCY, hff_ps_counter, HFF_R_GPS_SPEED, HFF_R_POS, hff_rb_last, hff_rb_n, hff_speed_lost_counter, init_butterworth_2_low_pass_int(), HfilterFloat::lag_counter, lag_counter_err, past_save_counter, register_periodic_telemetry(), Rgps_pos, Rgps_vel, HfilterFloat::rollback, save_counter, SAVE_DONE, send_hff(), and send_hff_debug().
Referenced by ins_int_init().
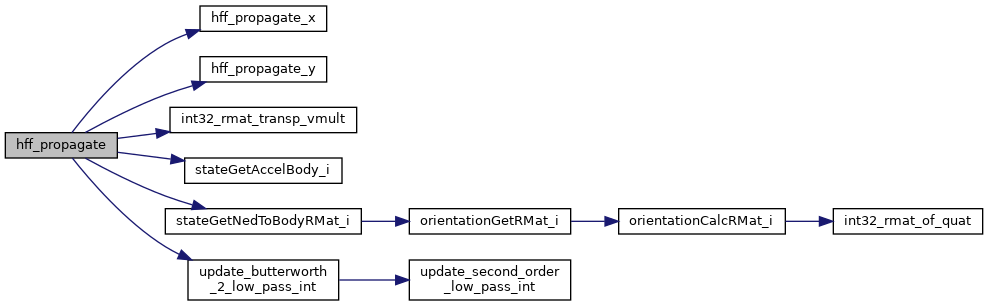
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 479 of file hf_float.c.
References ACCEL_FLOAT_OF_BFP, filter_x, filter_y, filter_z, foo, hff, HFF_DT, hff_lost_counter, hff_lost_limit, hff_propagate_x(), hff_propagate_y(), hff_ps_counter, hff_rb_last, hff_rb_n, hff_speed_lost_counter, hff_xdd_meas, hff_ydd_meas, int32_rmat_transp_vmult(), HfilterFloat::lag_counter, PRINT_DBG, HfilterFloat::rollback, save_counter, stateGetAccelBody_i(), stateGetNedToBodyRMat_i(), update_butterworth_2_low_pass_int(), Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by ins_int_propagate().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 602 of file hf_float.c.
References foo, hff, hff_rb_n, past_save_counter, save_counter, SAVE_DONE, FloatVect2::x, HfilterFloat::x, HfilterFloat::xbias, HfilterFloat::xdot, FloatVect2::y, HfilterFloat::y, HfilterFloat::ybias, and HfilterFloat::ydot.
Referenced by ins_int_update_gps().
Here is the caller graph for this function:
|
extern |
Definition at line 541 of file hf_float.c.
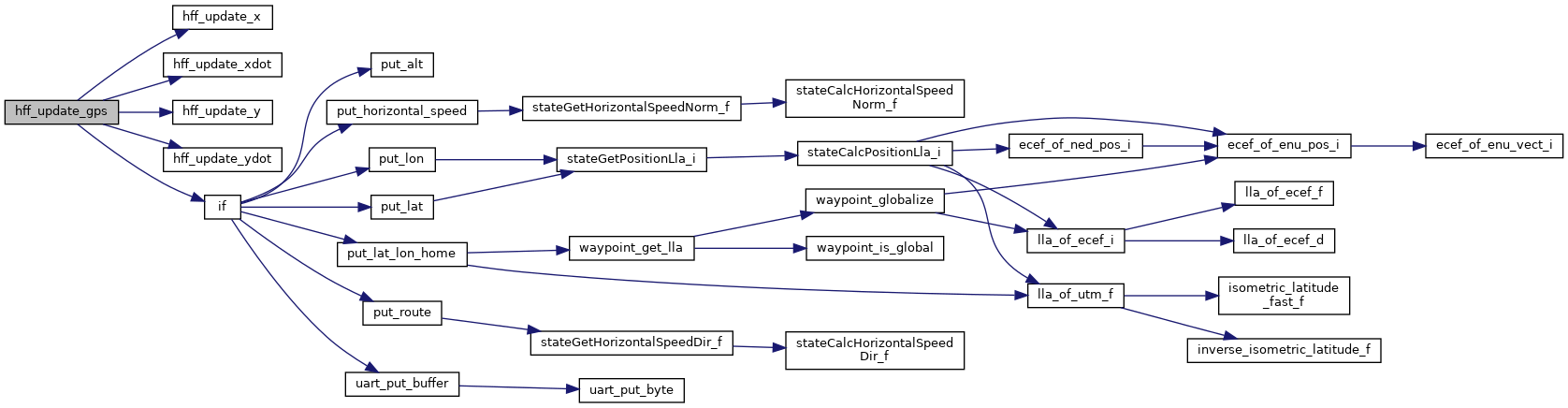
References foo, gps, hff, hff_lost_counter, HFF_R_GPS_SPEED_MIN, HFF_R_POS_MIN, hff_rb_last, hff_rb_n, hff_update_gps(), hff_update_x(), hff_update_xdot(), hff_update_y(), hff_update_ydot(), HfilterFloat::lag_counter, lag_counter_err, GpsState::pacc, past_save_counter, PRINT_DBG, Rgps_pos, Rgps_vel, HfilterFloat::rollback, GpsState::sacc, save_counter, HfilterFloat::x, and HfilterFloat::y.
Referenced by hff_update_gps(), and ins_int_update_gps().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Update position.
H = [1 0 0]; R = 0.1; // state residual y = rangemeter - H * Xm; // covariance residual S = H*Pm*H' + R; // kalman gain K = Pm*H'*inv(S); // update state Xp = Xm + K*y; // update covariance Pp = Pm - K*H*Pm;
Definition at line 711 of file hf_float.c.
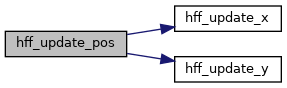
References foo, hff, hff_lost_counter, hff_update_x(), hff_update_y(), FloatVect2::x, and FloatVect2::y.
Referenced by pos_est_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 806 of file hf_float.c.
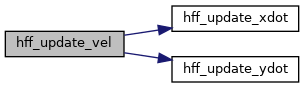
References foo, hff, hff_speed_lost_counter, hff_update_xdot(), hff_update_ydot(), FloatVect2::x, and FloatVect2::y.
Referenced by vel_est_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 124 of file hf_float.c.
Referenced by hff_init(), hff_init_x(), hff_init_y(), hff_propagate(), hff_realign(), hff_update_gps(), hff_update_pos(), hff_update_vel(), send_hff(), and send_hff_debug().