|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
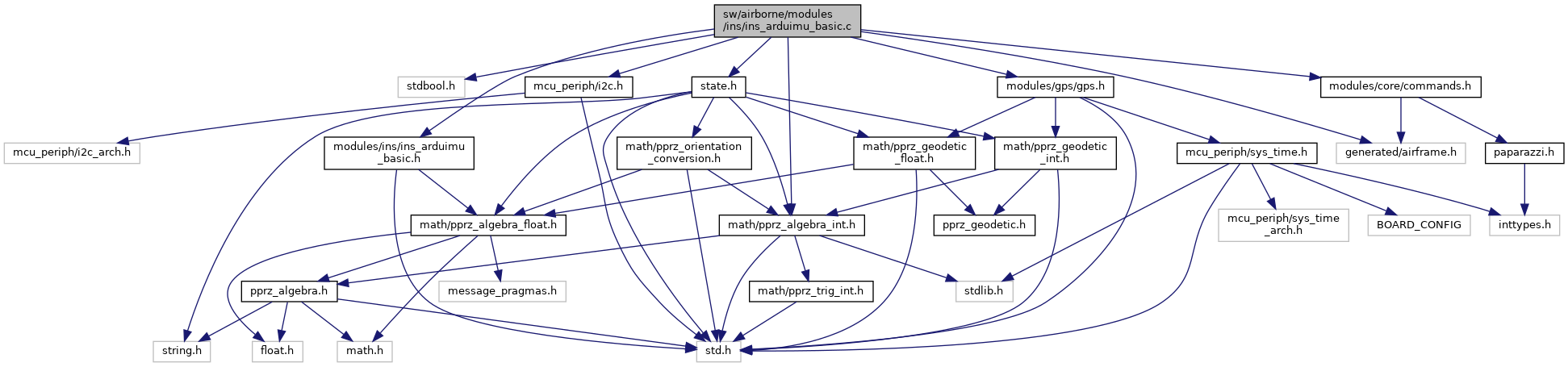
#include <stdbool.h>#include "modules/ins/ins_arduimu_basic.h"#include "mcu_periph/i2c.h"#include "state.h"#include "modules/gps/gps.h"#include "generated/airframe.h"#include "modules/core/commands.h"#include "math/pprz_algebra_int.h" Include dependency graph for ins_arduimu_basic.c:
Include dependency graph for ins_arduimu_basic.c:Go to the source code of this file.
Macros | |
| #define | NB_DATA 9 |
| #define | ARDUIMU_I2C_DEV i2c0 |
| #define | ArduIMU_SLAVE_ADDR 0x22 |
| #define | HIGH_ACCEL_LOW_SPEED 15.0 |
| #define | HIGH_ACCEL_LOW_SPEED_RESUME 4.0 |
| #define | HIGH_ACCEL_HIGH_THRUST (0.8*MAX_PPRZ) |
| #define | HIGH_ACCEL_HIGH_THRUST_RESUME (0.1*MAX_PPRZ) |
| #define | FillBufWith32bit(_buf, _index, _value) |
Functions | |
| void | ArduIMU_init (void) |
| void | ArduIMU_periodicGPS (void) |
| void | ArduIMU_periodic (void) |
| void | ArduIMU_event (void) |
| void | ahrs_update_gps (void) |
Variables | |
| struct i2c_transaction | ardu_gps_trans |
| struct i2c_transaction | ardu_ins_trans |
| static int16_t | recievedData [NB_DATA] |
| struct FloatEulers | arduimu_eulers |
| ArduIMU simulation. | |
| struct FloatRates | arduimu_rates |
| struct FloatVect3 | arduimu_accel |
| float | ins_roll_neutral |
| float | ins_pitch_neutral |
| bool | arduimu_calibrate_neutrals |
| bool | high_accel_done |
| bool | high_accel_flag |
Definition at line 43 of file ins_arduimu_basic.c.
| #define ArduIMU_SLAVE_ADDR 0x22 |
Definition at line 49 of file ins_arduimu_basic.c.
Definition at line 98 of file ins_arduimu_basic.c.
Definition at line 76 of file ins_arduimu_basic.c.
Definition at line 77 of file ins_arduimu_basic.c.
| #define HIGH_ACCEL_LOW_SPEED 15.0 |
Definition at line 74 of file ins_arduimu_basic.c.
| #define HIGH_ACCEL_LOW_SPEED_RESUME 4.0 |
Definition at line 75 of file ins_arduimu_basic.c.
| #define NB_DATA 9 |
Definition at line 40 of file ins_arduimu_basic.c.
Definition at line 214 of file ins_arduimu_basic.c.
Definition at line 165 of file ins_arduimu_basic.c.
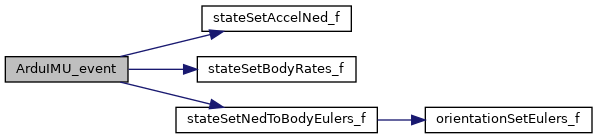
References ACCEL_FLOAT_OF_BFP, ANGLE_FLOAT_OF_BFP, ardu_gps_trans, ardu_ins_trans, arduimu_accel, arduimu_eulers, arduimu_rates, i2c_transaction::buf, DefaultChannel, DefaultDevice, foo, I2CTransDone, I2CTransFailed, I2CTransSuccess, ins_pitch_neutral, ins_roll_neutral, FloatRates::p, FloatEulers::phi, FloatEulers::psi, FloatRates::q, FloatRates::r, RATE_FLOAT_OF_BFP, recievedData, stateSetAccelNed_f(), stateSetBodyRates_f(), stateSetNedToBodyEulers_f(), i2c_transaction::status, FloatEulers::theta, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Here is the call graph for this function:Definition at line 81 of file ins_arduimu_basic.c.
References ardu_gps_trans, ardu_ins_trans, arduimu_accel, arduimu_calibrate_neutrals, arduimu_eulers, arduimu_rates, FLOAT_EULERS_ZERO, FLOAT_RATES_ZERO, FLOAT_VECT3_ZERO, high_accel_done, high_accel_flag, I2CTransDone, ins_pitch_neutral, INS_PITCH_NEUTRAL_DEFAULT, ins_roll_neutral, INS_ROLL_NEUTRAL_DEFAULT, and i2c_transaction::status.
Definition at line 142 of file ins_arduimu_basic.c.
References ardu_ins_trans, ARDUIMU_I2C_DEV, ArduIMU_SLAVE_ADDR, i2c_receive(), I2CTransDone, NB_DATA, and i2c_transaction::status.
Here is the call graph for this function:Definition at line 105 of file ins_arduimu_basic.c.
References ardu_gps_trans, arduimu_calibrate_neutrals, ARDUIMU_I2C_DEV, ArduIMU_SLAVE_ADDR, i2c_transaction::buf, GpsState::course, FillBufWith32bit, GpsState::fix, foo, gps, GpsState::gspeed, high_accel_done, high_accel_flag, HIGH_ACCEL_HIGH_THRUST, HIGH_ACCEL_HIGH_THRUST_RESUME, HIGH_ACCEL_LOW_SPEED, i2c_transmit(), I2CTransDone, GpsState::speed_3d, stateGetHorizontalSpeedNorm_f(), and i2c_transaction::status.
Here is the call graph for this function:| struct i2c_transaction ardu_gps_trans |
Definition at line 57 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event(), ArduIMU_init(), and ArduIMU_periodicGPS().
| struct i2c_transaction ardu_ins_trans |
Definition at line 58 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event(), ArduIMU_init(), and ArduIMU_periodic().
| struct FloatVect3 arduimu_accel |
Definition at line 64 of file ins_arduimu_basic.c.
| bool arduimu_calibrate_neutrals |
Definition at line 71 of file ins_arduimu_basic.c.
| struct FloatEulers arduimu_eulers |
ArduIMU simulation.
Sim provides attitude and rates.
Definition at line 62 of file ins_arduimu_basic.c.
| struct FloatRates arduimu_rates |
Definition at line 63 of file ins_arduimu_basic.c.
| bool high_accel_done |
Definition at line 78 of file ins_arduimu_basic.c.
Referenced by ArduIMU_init(), and ArduIMU_periodicGPS().
| bool high_accel_flag |
Definition at line 79 of file ins_arduimu_basic.c.
Referenced by ArduIMU_init(), and ArduIMU_periodicGPS().
| float ins_pitch_neutral |
Definition at line 67 of file ins_arduimu_basic.c.
| float ins_roll_neutral |
Definition at line 66 of file ins_arduimu_basic.c.
Definition at line 60 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event().