|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
INS for rotorcrafts combining vertical and horizontal filters. More...
#include "modules/ins/ins_int.h"#include "modules/core/abi.h"#include "modules/imu/imu.h"#include "modules/gps/gps.h"#include "generated/airframe.h"#include "modules/ins/vf_float.h"#include "math/pprz_geodetic_int.h"#include "math/pprz_isa.h"#include "math/pprz_stat.h"#include "modules/datalink/telemetry.h" Include dependency graph for ins_int.c:
Include dependency graph for ins_int.c:Go to the source code of this file.
Macros | |
| #define | VFF_R_AGL 0.2 |
| #define | INS_VFF_R_GPS 2.0 |
| #define | INS_VFF_VZ_R_GPS 2.0 |
| #define | INS_MAX_PROPAGATION_STEPS 200 |
| maximum number of propagation steps without any updates in between | |
| #define | USE_INS_NAV_INIT TRUE |
| #define | INS_BARO_MAX_INIT_VAR 1.f |
| default barometer to use in INS | |
| #define | INS_INT_BARO_ID ABI_BROADCAST |
| #define | INS_INT_IMU_ID ABI_BROADCAST |
| ABI binding for IMU data. | |
| #define | INS_INT_GPS_ID GPS_MULTI_ID |
| #define | INS_INT_VEL_ID ABI_BROADCAST |
| ABI binding for VELOCITY_ESTIMATE. | |
| #define | INS_INT_POS_ID ABI_BROADCAST |
| #define | INS_INT_AGL_ID ABI_BROADCAST |
| ABI binding for AGL. | |
| #define | press_hist_len 10 |
Variables | |
| abi_event | baro_ev |
| static abi_event | accel_ev |
| static abi_event | gps_ev |
| static abi_event | vel_est_ev |
| static abi_event | pos_est_ev |
| static abi_event | agl_ev |
| The agl ABI event. | |
| static abi_event | reset_ev |
| struct InsInt | ins_int |
| global INS state | |
INS for rotorcrafts combining vertical and horizontal filters.
Definition in file ins_int.c.
| #define INS_INT_AGL_ID ABI_BROADCAST |
| #define INS_INT_BARO_ID ABI_BROADCAST |
| #define INS_INT_GPS_ID GPS_MULTI_ID |
| #define INS_INT_IMU_ID ABI_BROADCAST |
| #define INS_INT_POS_ID ABI_BROADCAST |
| #define INS_INT_VEL_ID ABI_BROADCAST |
| #define INS_MAX_PROPAGATION_STEPS 200 |
| #define press_hist_len 10 |
|
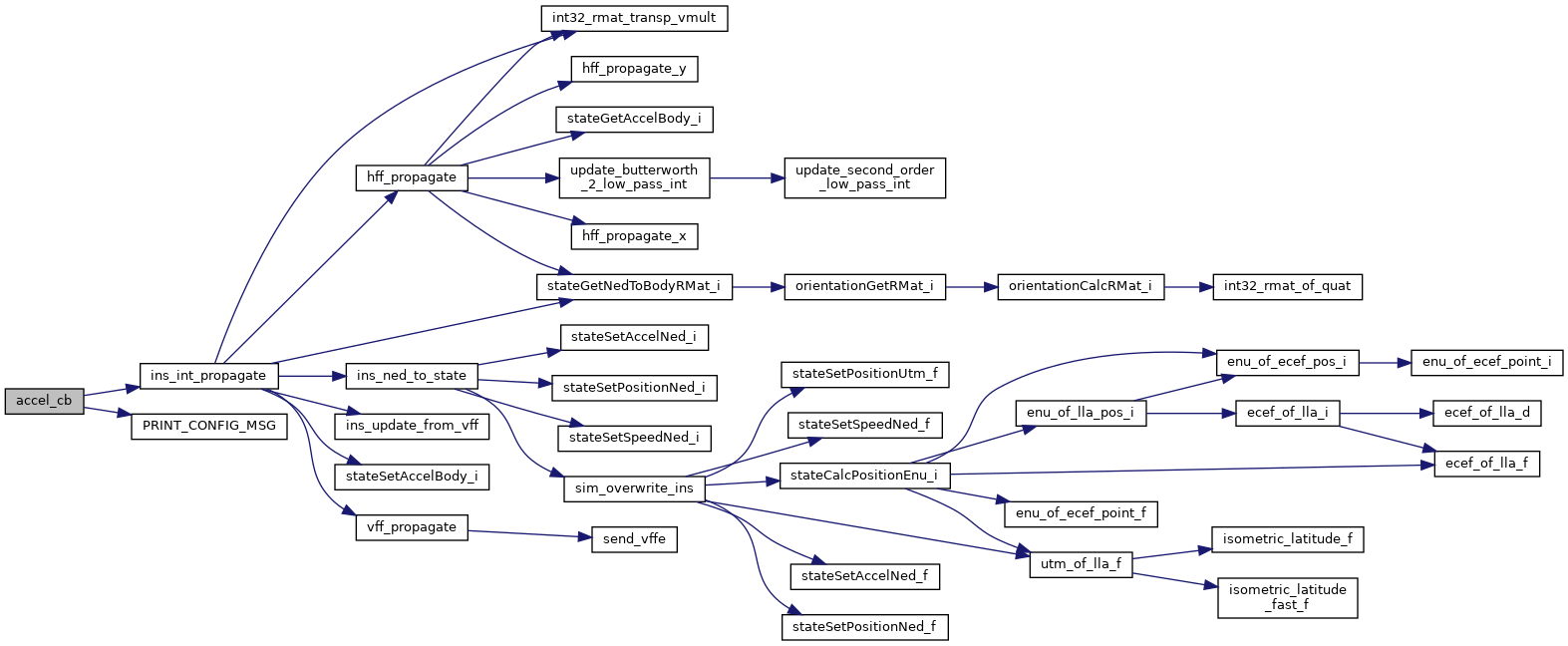
static |
Definition at line 577 of file ins_int.c.
References foo, ins_int_propagate(), and PRINT_CONFIG_MSG().
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:agl_cb This callback handles all estimates of the height of the vehicle above the ground under it This is only used with the extended version of the vertical float filter
Definition at line 538 of file ins_int.c.
Referenced by ins_int_init().
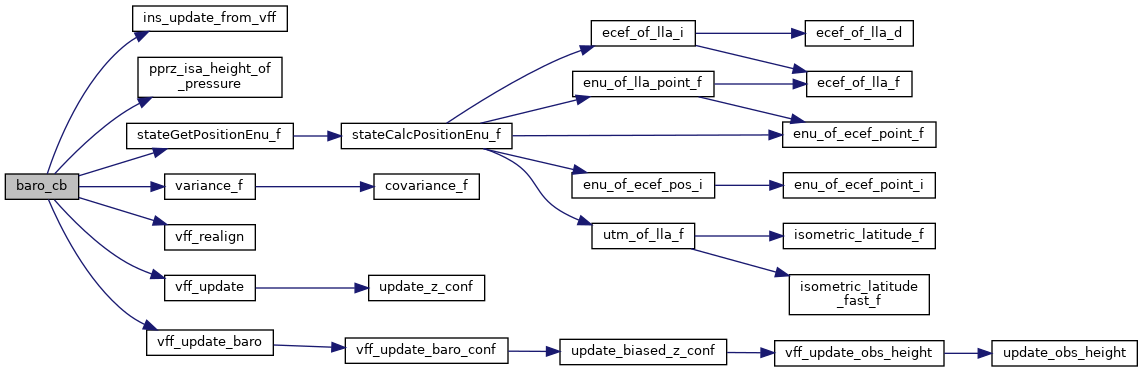
Here is the caller graph for this function:Definition at line 363 of file ins_int.c.
References InsInt::baro_initialized, InsInt::baro_z, foo, idx, INS_BARO_MAX_INIT_VAR, ins_int, ins_update_from_vff(), InsInt::ltp_initialized, pprz_isa_height_of_pressure(), press_hist_len, InsInt::propagation_cnt, InsInt::qfe, stateGetPositionEnu_f(), variance_f(), InsInt::vf_reset, vff_realign(), vff_update(), and vff_update_baro().
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 591 of file ins_int.c.
References foo, and ins_int_update_gps().
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 207 of file ins_int.c.
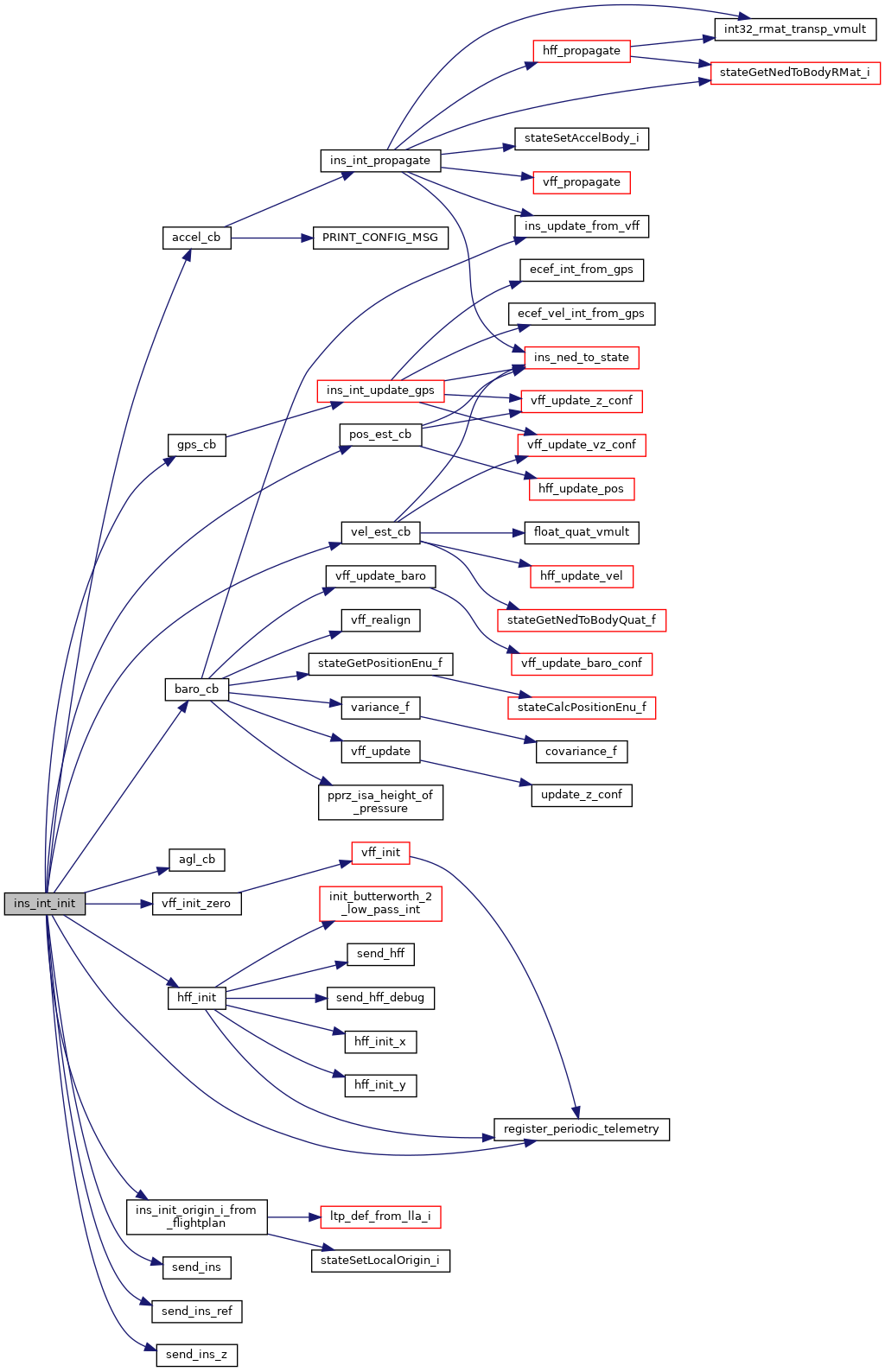
References ABI_BROADCAST, accel_cb(), accel_ev, agl_cb(), agl_ev, baro_cb(), baro_ev, InsInt::baro_initialized, DefaultPeriodic, foo, gps_cb(), gps_ev, InsInt::hf_realign, hff_init(), ins_init_origin_i_from_flightplan(), ins_int, INS_INT_AGL_ID, INS_INT_BARO_ID, INS_INT_GPS_ID, INS_INT_IMU_ID, INS_INT_POS_ID, INS_INT_VEL_ID, INS_MAX_PROPAGATION_STEPS, INT32_VECT3_ZERO, InsInt::ltp_accel, InsInt::ltp_def, InsInt::ltp_initialized, InsInt::ltp_pos, InsInt::ltp_speed, pos_est_cb(), pos_est_ev, InsInt::propagation_cnt, register_periodic_telemetry(), reset_cb(), reset_ev, send_ins(), send_ins_ref(), send_ins_z(), vel_est_cb(), vel_est_ev, InsInt::vf_reset, and vff_init_zero().
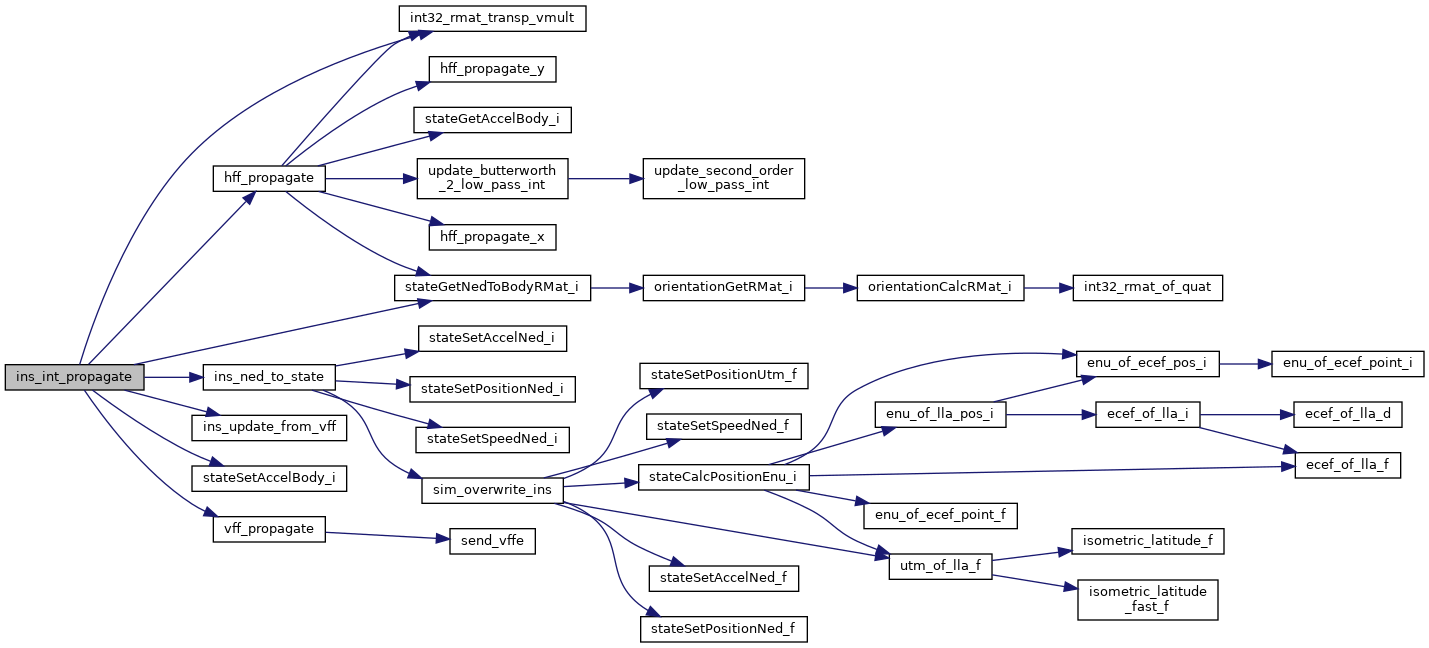
Here is the call graph for this function:| void ins_int_propagate | ( | struct Int32Vect3 * | accel, |
| float | dt | ||
| ) |
Definition at line 319 of file ins_int.c.
References ACCEL_BFP_OF_REAL, ACCEL_FLOAT_OF_BFP, foo, hff_propagate(), ins_int, INS_MAX_PROPAGATION_STEPS, ins_ned_to_state(), ins_update_from_vff(), int32_rmat_transp_vmult(), InsInt::ltp_accel, InsInt::propagation_cnt, stateGetNedToBodyRMat_i(), stateSetAccelBody_i(), vff_propagate(), NedCoor_i::x, NedCoor_i::y, and NedCoor_i::z.
Referenced by accel_cb().
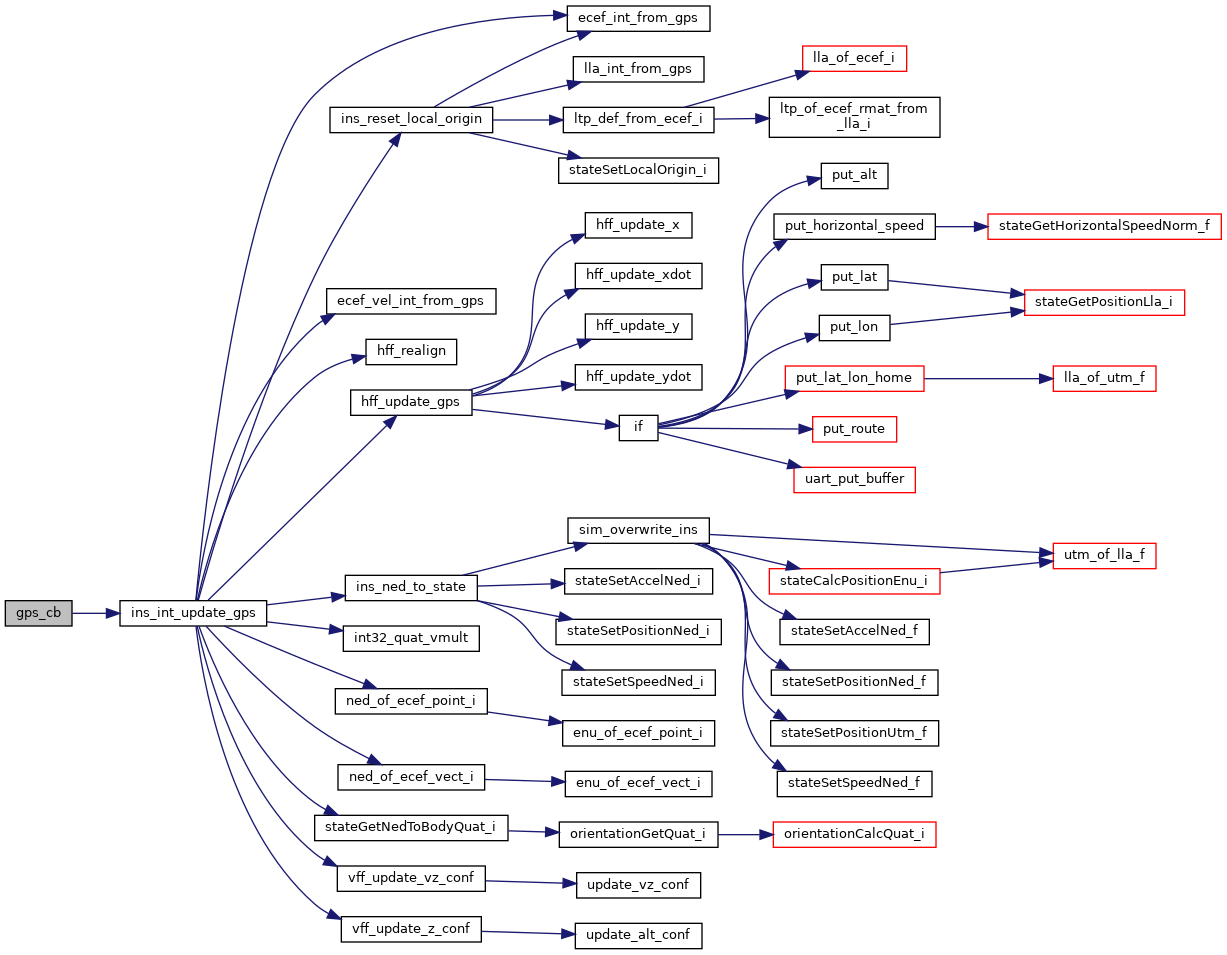
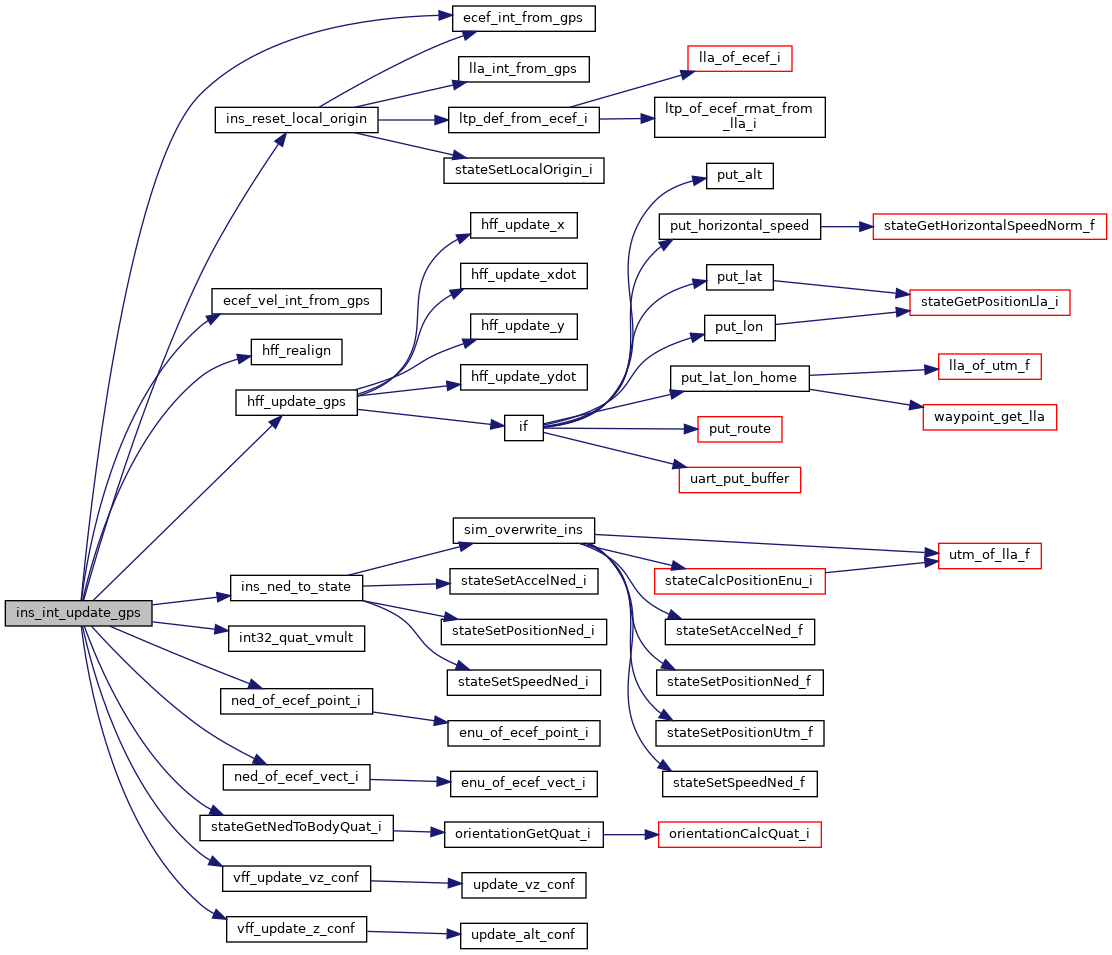
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 422 of file ins_int.c.
References ecef_int_from_gps(), ecef_vel_int_from_gps(), foo, GPS_FIX_3D, InsInt::hf_realign, hff_realign(), hff_update_gps(), ins_int, ins_ned_to_state(), INS_VFF_R_GPS, INS_VFF_VZ_R_GPS, INT32_POS_OF_CM_DEN, INT32_POS_OF_CM_NUM, int32_quat_vmult(), INT32_SPEED_OF_CM_S_DEN, INT32_SPEED_OF_CM_S_NUM, INT32_VECT2_SCALE_2, InsInt::ltp_def, InsInt::ltp_initialized, InsInt::ltp_pos, InsInt::ltp_speed, ned_of_ecef_point_i(), ned_of_ecef_vect_i(), InsInt::propagation_cnt, QUAT_INVERT, reset_ref(), stateGetNedToBodyQuat_i(), VECT2_ASSIGN, VECT2_SDIV, VECT3_SUB, vff_update_vz_conf(), vff_update_z_conf(), and Int32Vect3::x.
Referenced by gps_cb().
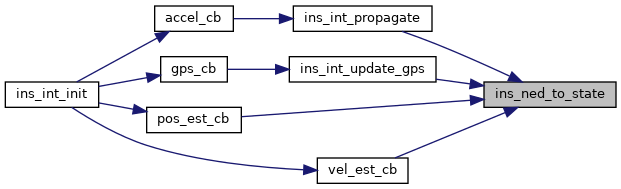
Here is the call graph for this function: Here is the caller graph for this function:copy position and speed to state interface
Definition at line 542 of file ins_int.c.
References foo, ins_int, InsInt::ltp_accel, InsInt::ltp_pos, InsInt::ltp_speed, nps_bypass_ins, sim_overwrite_ins(), stateSetAccelNed_i(), stateSetPositionNed_i(), and stateSetSpeedNed_i().
Referenced by ins_int_propagate(), ins_int_update_gps(), pos_est_cb(), and vel_est_cb().
Here is the call graph for this function: Here is the caller graph for this function:update ins state from vertical filter
Definition at line 556 of file ins_int.c.
References ACCEL_BFP_OF_REAL, ins_int, InsInt::ltp_accel, InsInt::ltp_pos, InsInt::ltp_speed, POS_BFP_OF_REAL, SPEED_BFP_OF_REAL, vff, NedCoor_i::z, VffExtended::z, VffExtended::zdot, and VffExtended::zdotdot.
Referenced by baro_cb(), and ins_int_propagate().
Here is the caller graph for this function:
|
static |
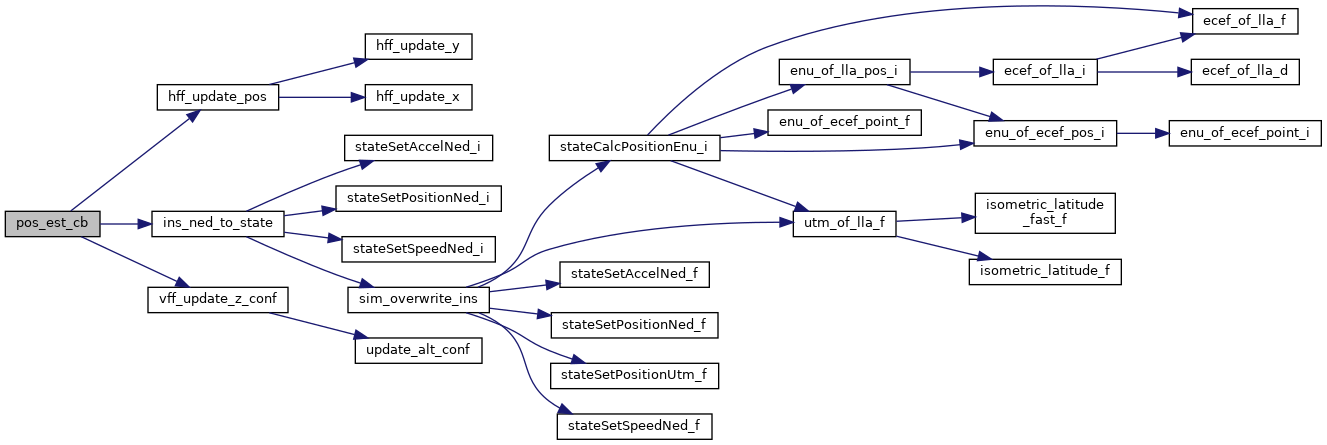
Definition at line 663 of file ins_int.c.
References foo, hff_update_pos(), ins_int, ins_ned_to_state(), InsInt::ltp_pos, POS_BFP_OF_REAL, InsInt::propagation_cnt, vff_update_z_conf(), FloatVect2::x, NedCoor_i::x, FloatVect2::y, and NedCoor_i::y.
Referenced by ins_int_init().
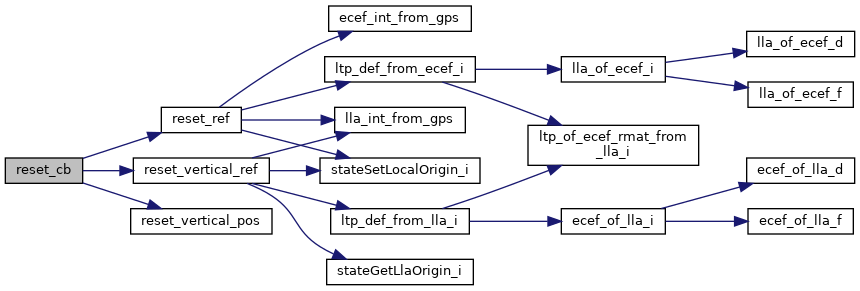
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 301 of file ins_int.c.
References foo, INS_RESET_REF, INS_RESET_VERTICAL_POS, INS_RESET_VERTICAL_REF, reset_ref(), reset_vertical_pos(), and reset_vertical_ref().
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 254 of file ins_int.c.
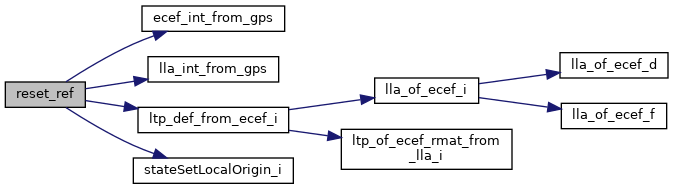
References LlaCoor_i::alt, ecef_int_from_gps(), foo, gps, GpsFixValid, InsInt::hf_realign, LtpDef_i::hmsl, GpsState::hmsl, ins_int, LtpDef_i::lla, lla_int_from_gps(), InsInt::ltp_def, ltp_def_from_ecef_i(), InsInt::ltp_initialized, stateSetLocalOrigin_i(), and InsInt::vf_reset.
Referenced by ins_int_update_gps(), and reset_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 296 of file ins_int.c.
References ins_int, and InsInt::vf_reset.
Referenced by reset_cb().
Here is the caller graph for this function:Definition at line 278 of file ins_int.c.
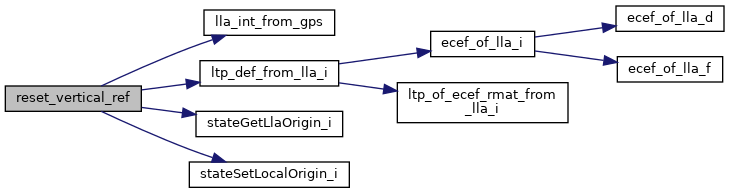
References LlaCoor_i::alt, foo, gps, GpsFixValid, LtpDef_i::hmsl, GpsState::hmsl, ins_int, LlaCoor_i::lat, lla_int_from_gps(), LlaCoor_i::lon, InsInt::ltp_def, ltp_def_from_lla_i(), stateGetLlaOrigin_i(), stateSetLocalOrigin_i(), and InsInt::vf_reset.
Referenced by reset_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 175 of file ins_int.c.
References dev, foo, ins_int, InsInt::ltp_accel, InsInt::ltp_pos, InsInt::ltp_speed, NedCoor_i::x, NedCoor_i::y, and NedCoor_i::z.
Referenced by ins_int_init().
Here is the caller graph for this function:
|
static |
Definition at line 189 of file ins_int.c.
References LlaCoor_i::alt, dev, LtpDef_i::ecef, foo, LtpDef_i::hmsl, ins_int, LlaCoor_i::lat, LtpDef_i::lla, LlaCoor_i::lon, InsInt::ltp_def, InsInt::ltp_initialized, InsInt::qfe, EcefCoor_i::x, EcefCoor_i::y, and EcefCoor_i::z.
Referenced by ins_int_init().
Here is the caller graph for this function:
|
static |
Definition at line 183 of file ins_int.c.
References InsInt::baro_z, dev, foo, ins_int, InsInt::ltp_accel, InsInt::ltp_pos, InsInt::ltp_speed, and NedCoor_i::z.
Referenced by ins_int_init().
Here is the caller graph for this function:
|
static |
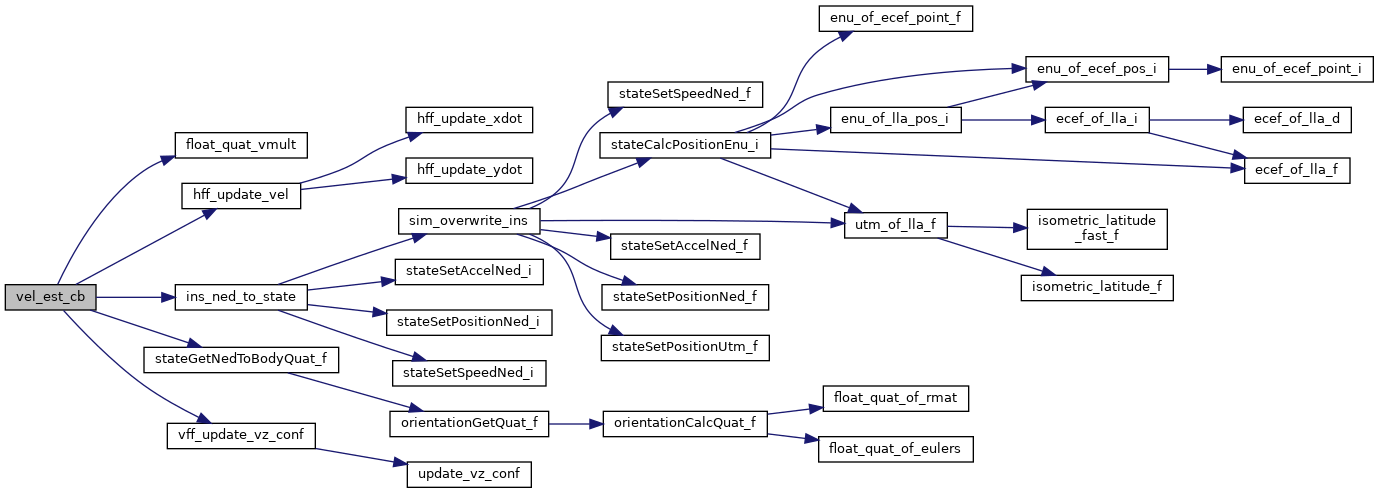
Definition at line 601 of file ins_int.c.
References float_quat_vmult(), foo, hff_update_vel(), ins_int, ins_ned_to_state(), InsInt::ltp_pos, InsInt::ltp_speed, POS_BFP_OF_REAL, InsInt::propagation_cnt, QUAT_INVERT, SPEED_BFP_OF_REAL, stateGetNedToBodyQuat_f(), vff_update_vz_conf(), FloatVect3::x, NedCoor_i::x, FloatVect3::y, NedCoor_i::y, and FloatVect3::z.
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 124 of file ins_int.c.
Referenced by ins_int_init().
|
static |
| abi_event baro_ev |
Definition at line 114 of file ins_int.c.
Referenced by ins_int_init().
|
static |
Definition at line 131 of file ins_int.c.
Referenced by ins_int_init().
| struct InsInt ins_int |
global INS state
Definition at line 170 of file ins_int.c.
Referenced by baro_cb(), ins_int_init(), ins_int_propagate(), ins_int_update_gps(), ins_ned_to_state(), ins_update_from_vff(), pos_est_cb(), reset_ref(), reset_vertical_pos(), reset_vertical_ref(), send_ins(), send_ins_ref(), send_ins_z(), and vel_est_cb().
|
static |
Definition at line 150 of file ins_int.c.
Referenced by ins_int_init().
|
static |
Definition at line 167 of file ins_int.c.
Referenced by ins_int_init().
|
static |
Definition at line 141 of file ins_int.c.
Referenced by ins_int_init().