|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
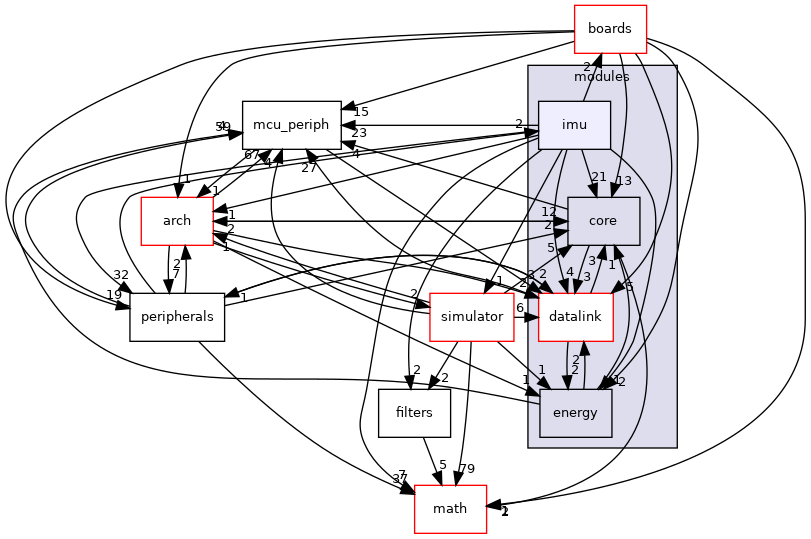
 Directory dependency graph for imu:
Directory dependency graph for imu:Files | |
| filter_1euro_imu.c | |
| filter_1euro_imu.h | |
| imu.c | |
| Inertial Measurement Unit interface. | |
| imu.h | |
| Inertial Measurement Unit interface. | |
| imu_ardrone2.c | |
| IMU implementation for ardrone2. | |
| imu_ardrone2.h | |
| IMU implementation for ardrone2. | |
| imu_aspirin.c | |
| Driver for the Aspirin v1.x IMU using SPI for the accelerometer. | |
| imu_aspirin.h | |
| Interface for the Aspirin v1.x IMU using SPI for the accelerometer. | |
| imu_aspirin_2_spi.c | |
| Driver for the Aspirin v2.x IMU using SPI for the MPU6000. | |
| imu_aspirin_2_spi.h | |
| Driver for the Aspirin v2.x IMU using SPI for the MPU6000. | |
| imu_aspirin_i2c.c | |
| Driver for the Aspirin v1.x IMU using I2C for the accelerometer. | |
| imu_aspirin_i2c.h | |
| Interface for the Aspirin v1.x IMU using I2C for the accelerometer. | |
| imu_bebop.c | |
| Driver for the Bebop (2) magnetometer, accelerometer and gyroscope. | |
| imu_bebop.h | |
| Interface for the Bebop magnetometer, accelerometer and gyroscope. | |
| imu_bmi088_i2c.c | |
| IMU driver for the BMI088 using I2C. | |
| imu_bmi088_i2c.h | |
| IMU driver for the BMI088 using I2C. | |
| imu_cube.c | |
| Driver for the IMU's in the Cube autopilots. | |
| imu_cube.h | |
| Driver for the IMU's in the Cube autopilots. | |
| imu_disco.c | |
| Driver for the Disco magnetometer, accelerometer and gyroscope. | |
| imu_disco.h | |
| Interface for the Disco magnetometer, accelerometer and gyroscope. | |
| imu_heater.c | |
| IMU heater module which can actuate a resistor heater through GPIO or IOMCU. | |
| imu_heater.h | |
| IMU heater module which can actuate a resistor heater through GPIO or IOMCU. | |
| imu_icm42688.c | |
| Driver module for the Invensense v3 IMU ICM42688. | |
| imu_icm42688.h | |
| Driver for the IMU ICM42688. | |
| imu_mpu6000.c | |
| Driver for IMU with only MPU6000 via SPI. | |
| imu_mpu6000.h | |
| Driver for IMU with only MPU6000 via SPI. | |
| imu_mpu6000_hmc5883.c | |
| Driver for IMU with MPU6000 via SPI and HMC5883 via I2c. | |
| imu_mpu6000_hmc5883.h | |
| Driver for IMU with MPU6000 via SPI and HMC5883 via I2c. | |
| imu_mpu60x0_i2c.c | |
| Driver for IMU with only MPU60X0 via I2C. | |
| imu_mpu60x0_i2c.h | |
| Driver for IMU with only MPU60x0 via I2C. | |
| imu_mpu9250.c | |
| imu_mpu9250.h | |
| imu_mpu9250_i2c.c | |
| IMU driver for the MPU9250 using I2C. | |
| imu_mpu9250_i2c.h | |
| IMU driver for the MPU9250 using I2C. | |
| imu_mpu9250_spi.c | |
| IMU driver for the MPU9250 using SPI. | |
| imu_mpu9250_spi.h | |
| IMU driver for the MPU9250 using SPI. | |
| imu_nps.c | |
| imu_nps.h | |
| imu_pixhawk6x.c | |
| imu_pixhawk6x.h | |
| Driver for the IMU's in the Pixhawk 6X autopilots. | |
| imu_px4fmu.c | |
| Driver for the PX4FMU SPI1 for the MPU6000 and I2C2 for the HMC5883. | |
| imu_px4fmu.h | |
| Driver for the PX4FMU SPI1 for the MPU6000 and I2C2 for the HMC5883. | |
| imu_px4fmu_v2.4.c | |
| imu_px4fmu_v2.4.h | |
| Driver for pixhawk IMU's. | |
| imu_vectornav.c | |
| Vectornav VN-200 IMU module, to be used with other AHRS/INS algorithms. | |
| imu_vectornav.h | |
| Vectornav VN-200 IMU module, to be used with other AHRS/INS algorithms. | |