|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
IMU driver for the MPU9250 using I2C. More...
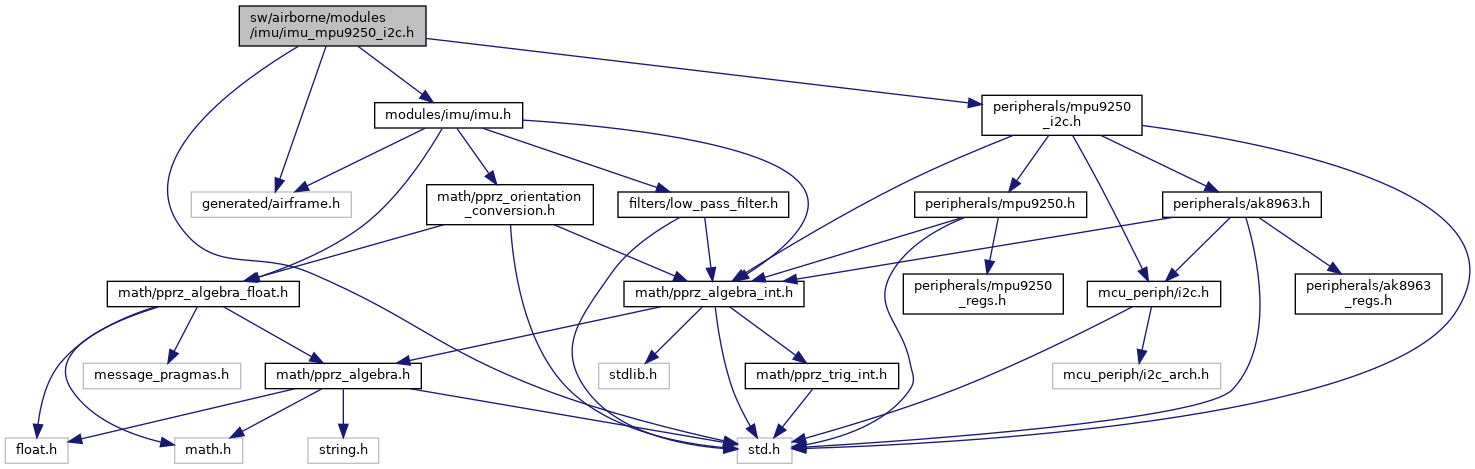
#include "std.h"#include "generated/airframe.h"#include "modules/imu/imu.h"#include "peripherals/mpu9250_i2c.h" Include dependency graph for imu_mpu9250_i2c.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for imu_mpu9250_i2c.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | ImuMpu9250 |
Macros | |
| #define | IMU_MPU9250_GYRO_RANGE MPU9250_GYRO_RANGE_1000 |
| #define | IMU_MPU9250_ACCEL_RANGE MPU9250_ACCEL_RANGE_8G |
Functions | |
| void | imu_mpu9250_init (void) |
| void | imu_mpu9250_periodic (void) |
| void | imu_mpu9250_event (void) |
Variables | |
| struct ImuMpu9250 | imu_mpu9250 |
IMU driver for the MPU9250 using I2C.
Definition in file imu_mpu9250_i2c.h.
| struct ImuMpu9250 |
Definition at line 46 of file imu_mpu9250_i2c.h.
Collaboration diagram for ImuMpu9250:| Data Fields | ||
|---|---|---|
| struct Mpu9250_I2c | mpu | |
| struct Mpu9250_Spi | mpu | |
| volatile bool | slave4_ready | |
| volatile uint8_t | wait_slave4_rx_buf[2] | |
| struct spi_transaction | wait_slave4_trans | |
| volatile uint8_t | wait_slave4_tx_buf[1] | |
| #define IMU_MPU9250_ACCEL_RANGE MPU9250_ACCEL_RANGE_8G |
Definition at line 43 of file imu_mpu9250_i2c.h.
| #define IMU_MPU9250_GYRO_RANGE MPU9250_GYRO_RANGE_1000 |
Definition at line 39 of file imu_mpu9250_i2c.h.
Definition at line 47 of file imu_mpu9250.c.
Definition at line 37 of file imu_mpu9250.c.
Definition at line 42 of file imu_mpu9250.c.
|
extern |
Definition at line 103 of file imu_mpu9250_i2c.c.