|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
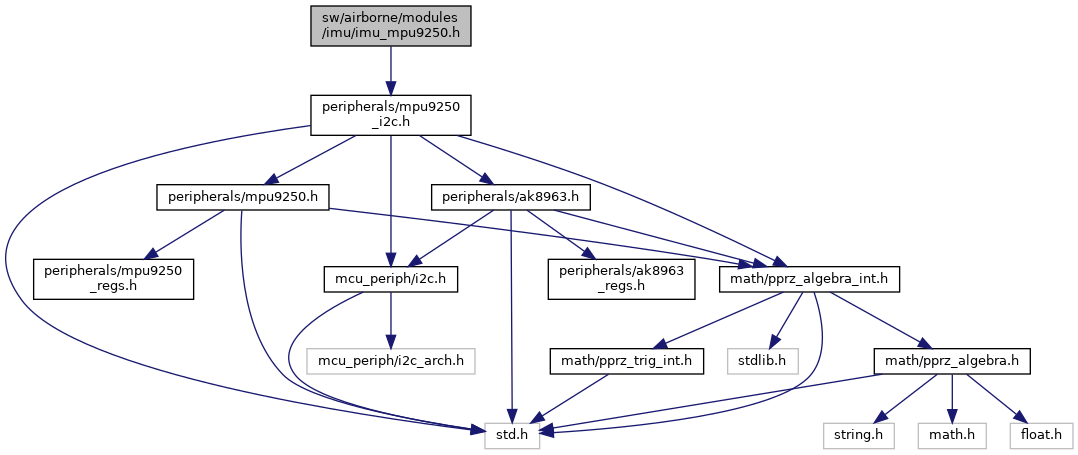
#include "peripherals/mpu9250_i2c.h" Include dependency graph for imu_mpu9250.h: This graph shows which files directly or indirectly include this file:
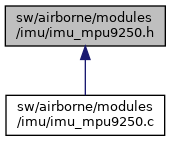
Include dependency graph for imu_mpu9250.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | imu_mpu9250_init (void) |
| void | imu_mpu9250_periodic (void) |
| void | imu_mpu9250_event (void) |
| void | imu_mpu9250_report (void) |
Variables | |
| struct Mpu9250_I2c | mpu9250 |
Test module for the mpu9250
Definition in file imu_mpu9250.h.
Definition at line 47 of file imu_mpu9250.c.
Definition at line 37 of file imu_mpu9250.c.
Definition at line 42 of file imu_mpu9250.c.
Definition at line 56 of file imu_mpu9250.c.
References Mpu9250_I2c::akm, Ak8963::data, Mpu9250_I2c::data_accel, Mpu9250_I2c::data_rates, DefaultChannel, DefaultDevice, foo, IMU_MPU9250_ID, mpu9250, Int32Rates::p, Int32Rates::q, Int32Rates::r, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
|
extern |
Definition at line 35 of file imu_mpu9250.c.
Referenced by imu_mpu9250_event(), imu_mpu9250_init(), imu_mpu9250_periodic(), and imu_mpu9250_report().