|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Driver for the Bebop (2) magnetometer, accelerometer and gyroscope. More...
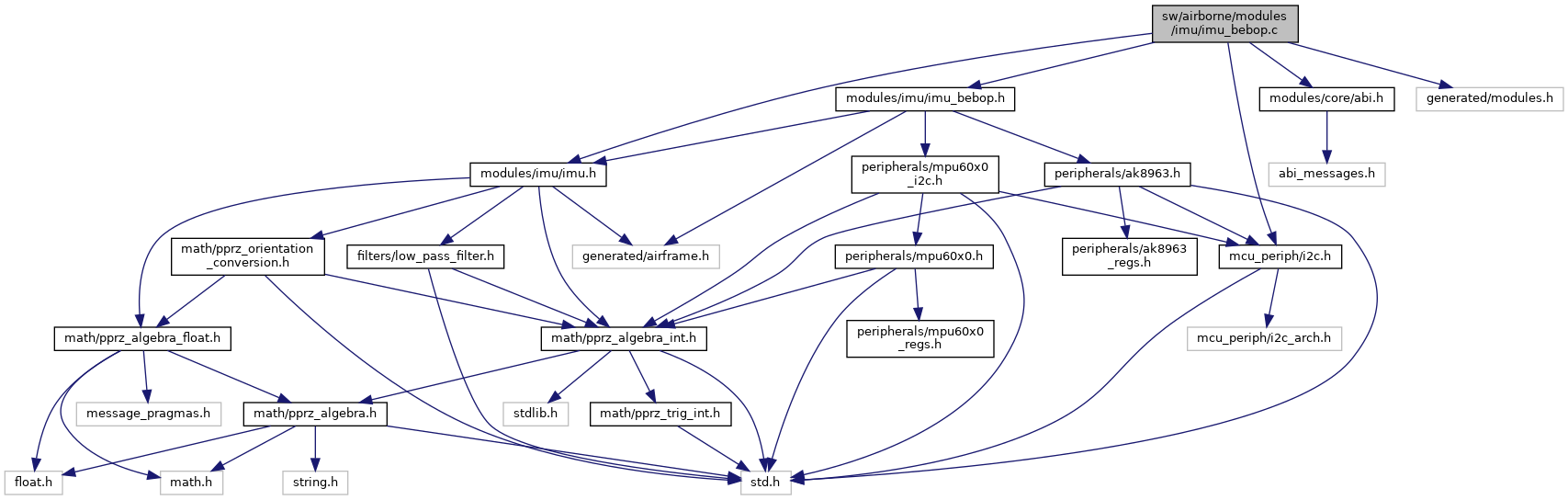
#include "modules/imu/imu_bebop.h"#include "modules/imu/imu.h"#include "modules/core/abi.h"#include "mcu_periph/i2c.h"#include "generated/modules.h" Include dependency graph for imu_bebop.c:
Include dependency graph for imu_bebop.c:Go to the source code of this file.
Macros | |
| #define | BEBOP_MAG_I2C_DEV i2c1 |
| #define | BEBOP_MPU_I2C_DEV i2c2 |
Functions | |
| void | imu_bebop_init (void) |
| Navstik IMU initializtion of the MPU-60x0 and HMC58xx. | |
| void | imu_bebop_periodic (void) |
| Handle all the periodic tasks of the Navstik IMU components. | |
| void | imu_bebop_event (void) |
| Handle all the events of the Navstik IMU components. | |
Variables | |
| struct OrientationReps | imu_to_mag_bebop |
| IMU to magneto rotation. | |
| struct ImuBebop | imu_bebop |
| Basic Navstik IMU data. | |
Driver for the Bebop (2) magnetometer, accelerometer and gyroscope.
Definition in file imu_bebop.c.
Definition at line 36 of file imu_bebop.c.
Definition at line 41 of file imu_bebop.c.
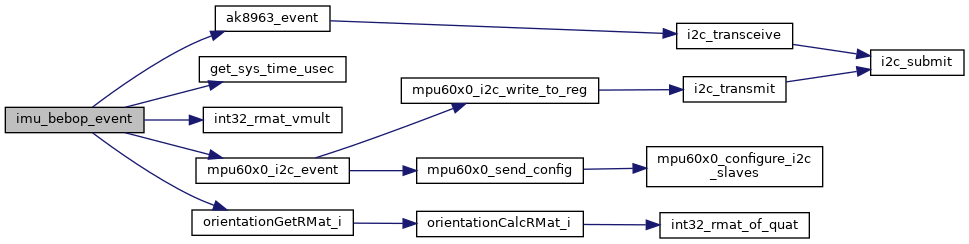
Handle all the events of the Navstik IMU components.
When there is data available convert it to the correct axis and save it in the imu structure.
Definition at line 118 of file imu_bebop.c.
References ImuBebop::ak, ak8963_event(), Ak8963::data, Mpu60x0_I2c::data_accel, Ak8963::data_available, Mpu60x0_I2c::data_available, Mpu60x0_I2c::data_rates, foo, get_sys_time_usec(), imu_bebop, IMU_BOARD_ID, imu_to_mag_bebop, int32_rmat_vmult(), ImuBebop::mpu, mpu60x0_i2c_event(), orientationGetRMat_i(), RATES_ASSIGN, Mpu60x0_I2c::temp, and VECT3_ASSIGN.
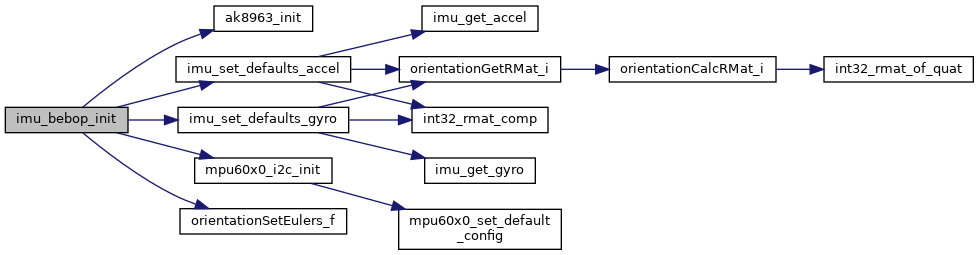
Here is the call graph for this function:Navstik IMU initializtion of the MPU-60x0 and HMC58xx.
Definition at line 76 of file imu_bebop.c.
References Mpu60x0Config::accel_range, ImuBebop::ak, AK8963_ADDR, ak8963_init(), BEBOP_ACCEL_RANGE, BEBOP_GYRO_RANGE, BEBOP_MAG_I2C_DEV, BEBOP_MPU_I2C_DEV, Mpu60x0_I2c::config, Mpu60x0Config::dlpf_cfg, foo, Mpu60x0Config::gyro_range, imu_bebop, IMU_BOARD_ID, imu_set_defaults_accel(), imu_set_defaults_gyro(), imu_to_mag_bebop, ImuBebop::mpu, MPU60X0_ACCEL_SENS_F, MPU60X0_ADDR, MPU60X0_GYRO_SENS_F, mpu60x0_i2c_init(), orientationSetEulers_f(), and Mpu60x0Config::smplrt_div.
Here is the call graph for this function:Handle all the periodic tasks of the Navstik IMU components.
Read the MPU60x0 every periodic call and the HMC58XX every 10th call.
Definition at line 105 of file imu_bebop.c.
References ImuBebop::ak, ak8963_periodic(), imu_bebop, ImuBebop::mpu, and mpu60x0_i2c_periodic().
Here is the call graph for this function:| struct ImuBebop imu_bebop |
Basic Navstik IMU data.
Definition at line 71 of file imu_bebop.c.
Referenced by imu_bebop_event(), imu_bebop_init(), imu_bebop_periodic(), and imu_temp_ctrl_periodic().
| struct OrientationReps imu_to_mag_bebop |
IMU to magneto rotation.
Definition at line 68 of file imu_bebop.c.
Referenced by imu_bebop_event(), and imu_bebop_init().