|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Driver module for the Invensense v3 IMU ICM42688. More...
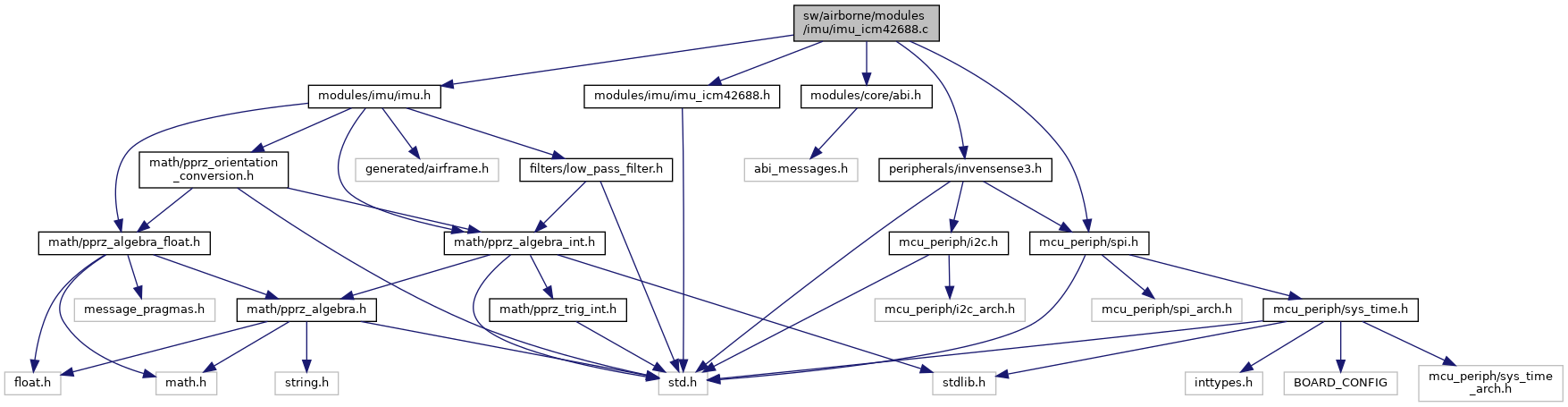
#include "modules/imu/imu_icm42688.h"#include "modules/imu/imu.h"#include "modules/core/abi.h"#include "mcu_periph/spi.h"#include "peripherals/invensense3.h" Include dependency graph for imu_icm42688.c:
Include dependency graph for imu_icm42688.c:Go to the source code of this file.
Macros | |
| #define | INVENSENSE3_GYRO_AAF 977 |
| #define | INVENSENSE3_ACCEL_AAF 213 |
Functions | |
| void | imu_icm42688_init (void) |
| void | imu_icm42688_periodic (void) |
| void | imu_icm42688_event (void) |
Variables | |
| static struct invensense3_t | imu_icm42688 |
Driver module for the Invensense v3 IMU ICM42688.
Definition in file imu_icm42688.c.
| #define INVENSENSE3_ACCEL_AAF 213 |
Definition at line 39 of file imu_icm42688.c.
| #define INVENSENSE3_GYRO_AAF 977 |
Definition at line 35 of file imu_icm42688.c.
Definition at line 71 of file imu_icm42688.c.
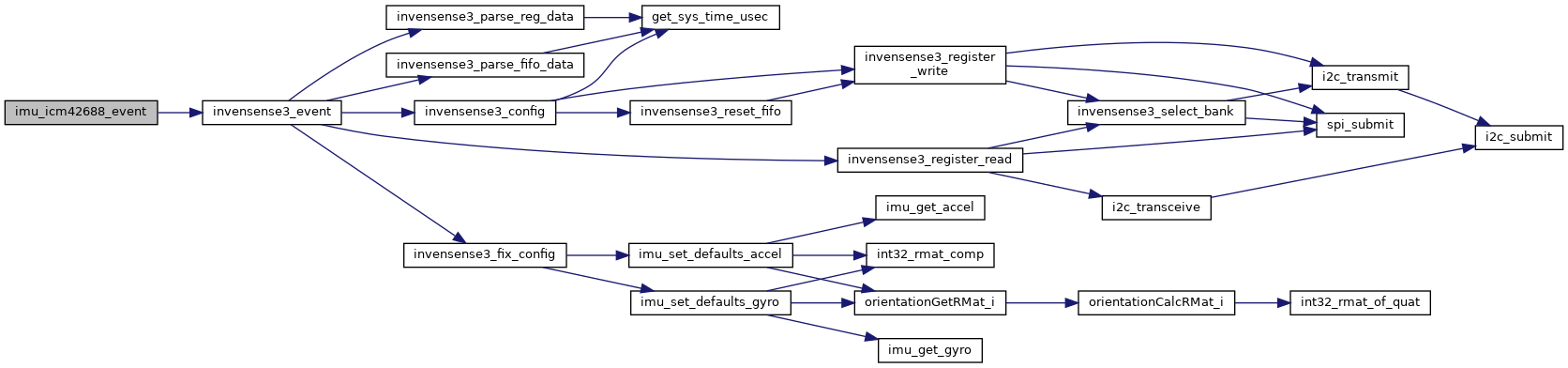
References imu_icm42688, and invensense3_event().
Here is the call graph for this function:Definition at line 44 of file imu_icm42688.c.
References invensense3_t::abi_id, invensense3_t::accel_aaf, invensense3_t::accel_odr, invensense3_t::accel_range, invensense3_t::bus, foo, invensense3_t::gyro_aaf, invensense3_t::gyro_odr, invensense3_t::gyro_range, imu_icm42688, IMU_ICM42688_ID, INVENSENSE3_ACCEL_AAF, INVENSENSE3_GYRO_AAF, invensense3_init(), INVENSENSE3_PARSER_FIFO, INVENSENSE3_SPI, and invensense3_t::parser.
Here is the call graph for this function:Definition at line 66 of file imu_icm42688.c.
References imu_icm42688, and invensense3_periodic().
Here is the call graph for this function:
|
static |
Definition at line 42 of file imu_icm42688.c.
Referenced by imu_icm42688_event(), imu_icm42688_init(), and imu_icm42688_periodic().