|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
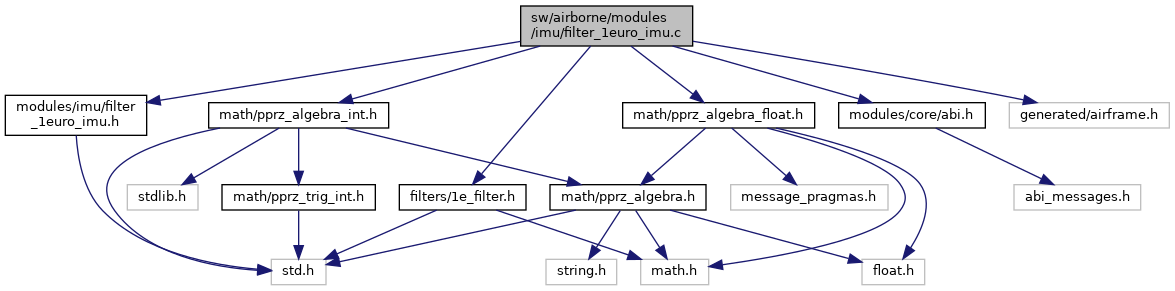
#include "modules/imu/filter_1euro_imu.h"#include "filters/1e_filter.h"#include "math/pprz_algebra_int.h"#include "math/pprz_algebra_float.h"#include "modules/core/abi.h"#include "generated/airframe.h" Include dependency graph for filter_1euro_imu.c:
Include dependency graph for filter_1euro_imu.c:Go to the source code of this file.
Macros | |
| #define | FILTER_1EURO_ENABLED TRUE |
| Enable by default. | |
| #define | FILTER_1EURO_GYRO_MINCUTOFF 10.f |
| Default gyro min cutoff freq. | |
| #define | FILTER_1EURO_GYRO_BETA 0.1f |
| Default gyro beta coef. | |
| #define | FILTER_1EURO_GYRO_DCUTOFF 1.f |
| Default gyro dcutoff (not recommanded to change) | |
| #define | FILTER_1EURO_ACCEL_MINCUTOFF 0.1f |
| Default accel min cutoff freq. | |
| #define | FILTER_1EURO_ACCEL_BETA 0.01f |
| Default accel beta coef. | |
| #define | FILTER_1EURO_ACCEL_DCUTOFF 1.f |
| Default accel dcutoff (not recommanded to change) | |
| #define | FILTER_1EURO_FREQ PERIODIC_FREQUENCY |
| Auto freq if not defined. | |
| #define | IMU_F1E_BIND_ID ABI_BROADCAST |
| ABI bindings. | |
Functions | |
| static void | gyro_cb (uint8_t sender_id, uint32_t stamp, struct Int32Rates *gyro) |
| static void | accel_cb (uint8_t sender_id, uint32_t stamp, struct Int32Vect3 *accel) |
| static void | mag_cb (uint8_t sender_id, uint32_t stamp, struct Int32Vect3 *mag) |
| void | filter_1euro_imu_init (void) |
| Init and bindings. | |
| void | filter_1euro_imu_reset (float enabled) |
| settings handlers | |
| void | filter_1euro_imu_update_gyro_mincutoff (float mincutoff) |
| void | filter_1euro_imu_update_gyro_beta (float beta) |
| void | filter_1euro_imu_update_gyro_dcutoff (float dcutoff) |
| void | filter_1euro_imu_update_accel_mincutoff (float mincutoff) |
| void | filter_1euro_imu_update_accel_beta (float beta) |
| void | filter_1euro_imu_update_accel_dcutoff (float dcutoff) |
Variables | |
| struct Filter1eImu | filter_1e_imu |
| configuration structure | |
| static struct OneEuroFilter | gyro_1e [3] |
| array of 1 euro filters for gyrometer | |
| static struct OneEuroFilter | accel_1e [3] |
| array of 1 euro filters for accelerometer | |
| static abi_event | gyro_ev |
| static abi_event | accel_ev |
| static abi_event | mag_ev |
Definition in file filter_1euro_imu.c.
Default accel beta coef.
Definition at line 60 of file filter_1euro_imu.c.
Default accel dcutoff (not recommanded to change)
Definition at line 65 of file filter_1euro_imu.c.
Default accel min cutoff freq.
Definition at line 55 of file filter_1euro_imu.c.
Enable by default.
Definition at line 35 of file filter_1euro_imu.c.
| #define FILTER_1EURO_FREQ PERIODIC_FREQUENCY |
Auto freq if not defined.
Definition at line 79 of file filter_1euro_imu.c.
Default gyro beta coef.
Definition at line 45 of file filter_1euro_imu.c.
Default gyro dcutoff (not recommanded to change)
Definition at line 50 of file filter_1euro_imu.c.
Default gyro min cutoff freq.
Definition at line 40 of file filter_1euro_imu.c.
| #define IMU_F1E_BIND_ID ABI_BROADCAST |
ABI bindings.
by default bind to all IMU raw data and send filtered data receivers (AHRS, INS) should bind to this prefilter module IMU (gyro, accel)
Definition at line 106 of file filter_1euro_imu.c.
|
static |
Definition at line 143 of file filter_1euro_imu.c.
References accel_1e, ACCELS_BFP_OF_REAL, ACCELS_FLOAT_OF_BFP, Filter1eImu::enabled, filter_1e_imu, foo, IMU_F1E_ID, update_1e_filter(), and update_1e_filter_at_time().
Referenced by filter_1euro_imu_init().
Here is the call graph for this function: Here is the caller graph for this function:Init and bindings.
Definition at line 185 of file filter_1euro_imu.c.
References accel_1e, Filter1eImu::accel_beta, accel_cb(), Filter1eImu::accel_dcutoff, accel_ev, Filter1eImu::accel_mincutoff, Filter1eImu::enabled, filter_1e_imu, FILTER_1EURO_ACCEL_BETA, FILTER_1EURO_ACCEL_DCUTOFF, FILTER_1EURO_ACCEL_MINCUTOFF, FILTER_1EURO_ENABLED, FILTER_1EURO_FREQ, FILTER_1EURO_GYRO_BETA, FILTER_1EURO_GYRO_DCUTOFF, FILTER_1EURO_GYRO_MINCUTOFF, foo, gyro_1e, Filter1eImu::gyro_beta, gyro_cb(), Filter1eImu::gyro_dcutoff, gyro_ev, Filter1eImu::gyro_mincutoff, IMU_F1E_BIND_ID, init_1e_filter(), mag_cb(), and mag_ev.
Here is the call graph for this function:settings handlers
Definition at line 217 of file filter_1euro_imu.c.
References accel_1e, Filter1eImu::enabled, filter_1e_imu, gyro_1e, and reset_1e_filter().
Here is the call graph for this function:Definition at line 258 of file filter_1euro_imu.c.
References accel_1e, Filter1eImu::accel_beta, OneEuroFilter::beta, and filter_1e_imu.
Definition at line 266 of file filter_1euro_imu.c.
References accel_1e, Filter1eImu::accel_dcutoff, OneEuroFilter::dcutoff, and filter_1e_imu.
Definition at line 250 of file filter_1euro_imu.c.
References accel_1e, Filter1eImu::accel_mincutoff, filter_1e_imu, and OneEuroFilter::mincutoff.
Definition at line 234 of file filter_1euro_imu.c.
References OneEuroFilter::beta, filter_1e_imu, gyro_1e, and Filter1eImu::gyro_beta.
Definition at line 242 of file filter_1euro_imu.c.
References OneEuroFilter::dcutoff, filter_1e_imu, gyro_1e, and Filter1eImu::gyro_dcutoff.
Definition at line 226 of file filter_1euro_imu.c.
References filter_1e_imu, gyro_1e, Filter1eImu::gyro_mincutoff, and OneEuroFilter::mincutoff.
|
static |
Definition at line 114 of file filter_1euro_imu.c.
References Filter1eImu::enabled, filter_1e_imu, foo, gyro_1e, IMU_F1E_ID, RATES_BFP_OF_REAL, RATES_FLOAT_OF_BFP, update_1e_filter(), and update_1e_filter_at_time().
Referenced by filter_1euro_imu_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 172 of file filter_1euro_imu.c.
References foo, and IMU_F1E_ID.
Referenced by filter_1euro_imu_init().
Here is the caller graph for this function:
|
static |
array of 1 euro filters for accelerometer
Definition at line 96 of file filter_1euro_imu.c.
Referenced by accel_cb(), filter_1euro_imu_init(), filter_1euro_imu_reset(), filter_1euro_imu_update_accel_beta(), filter_1euro_imu_update_accel_dcutoff(), and filter_1euro_imu_update_accel_mincutoff().
|
static |
Definition at line 111 of file filter_1euro_imu.c.
Referenced by filter_1euro_imu_init().
| struct Filter1eImu filter_1e_imu |
configuration structure
Definition at line 86 of file filter_1euro_imu.c.
Referenced by accel_cb(), filter_1euro_imu_init(), filter_1euro_imu_reset(), filter_1euro_imu_update_accel_beta(), filter_1euro_imu_update_accel_dcutoff(), filter_1euro_imu_update_accel_mincutoff(), filter_1euro_imu_update_gyro_beta(), filter_1euro_imu_update_gyro_dcutoff(), filter_1euro_imu_update_gyro_mincutoff(), and gyro_cb().
|
static |
array of 1 euro filters for gyrometer
Definition at line 91 of file filter_1euro_imu.c.
Referenced by filter_1euro_imu_init(), filter_1euro_imu_reset(), filter_1euro_imu_update_gyro_beta(), filter_1euro_imu_update_gyro_dcutoff(), filter_1euro_imu_update_gyro_mincutoff(), and gyro_cb().
|
static |
Definition at line 110 of file filter_1euro_imu.c.
Referenced by filter_1euro_imu_init().
|
static |
Definition at line 112 of file filter_1euro_imu.c.
Referenced by filter_1euro_imu_init().