|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
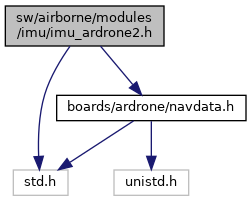
IMU implementation for ardrone2. More...
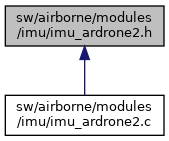
 Include dependency graph for imu_ardrone2.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for imu_ardrone2.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
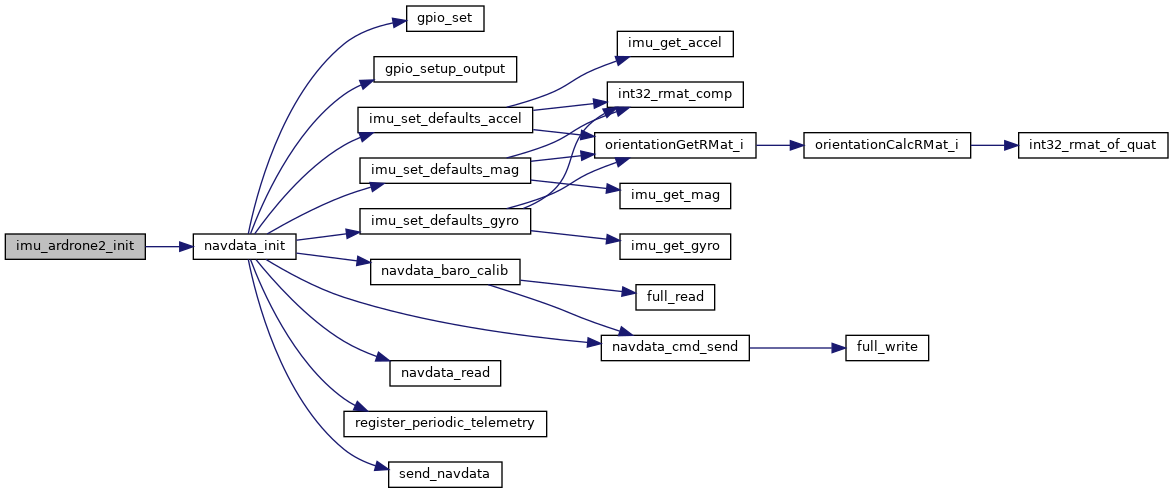
| void | imu_ardrone2_init (void) |
IMU implementation for ardrone2.
Definition in file imu_ardrone2.h.
Definition at line 30 of file imu_ardrone2.c.
References navdata_init().
Here is the call graph for this function: