|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
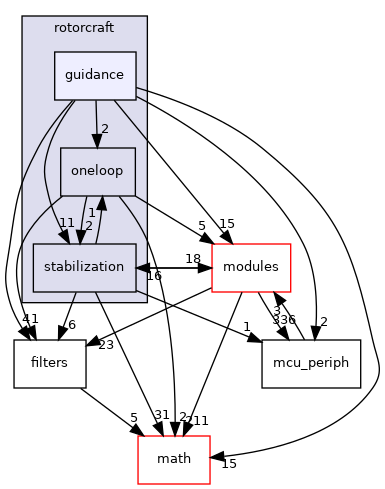
 Directory dependency graph for guidance:
Directory dependency graph for guidance:Files | |
| guidance_flip.c | |
| Open Loop guidance for making a flip. | |
| guidance_flip.h | |
| Open Loop guidance for making a flip. | |
| guidance_h.c | |
| Horizontal guidance for rotorcrafts. | |
| guidance_h.h | |
| Horizontal guidance for rotorcrafts. | |
| guidance_h_ref.c | |
| Reference generation for horizontal guidance. | |
| guidance_h_ref.h | |
| Reference generation for horizontal guidance. | |
| guidance_hybrid.c | |
| Guidance controllers (horizontal and vertical) for Hybrid UAV configurations. | |
| guidance_hybrid.h | |
| Guidance controllers (horizontal and vertical) for Hybrid UAV configurations. | |
| guidance_indi.c | |
| A guidance mode based on Incremental Nonlinear Dynamic Inversion. | |
| guidance_indi.h | |
| A guidance mode based on Incremental Nonlinear Dynamic Inversion. | |
| guidance_indi_fully_actuated.c | |
| Fully actuated plateform can be achieve with hexa-copter with tilted propellers for example. | |
| guidance_indi_fully_actuated.h | |
| Fully actuated plateform can be achieve with hexa-copter with tilted propellers for example TODO cite Mohamad Hachem. | |
| guidance_indi_hinf.c | |
| guidance_indi_hybrid.c | |
| A guidance mode based on Incremental Nonlinear Dynamic Inversion Come to IROS2016 to learn more! | |
| guidance_indi_hybrid.h | |
| A guidance mode based on Incremental Nonlinear Dynamic Inversion Come to ICRA2016 to learn more! | |
| guidance_indi_hybrid_quadplane.c | |
| guidance_indi_hybrid_quadplane.h | |
| guidance_indi_hybrid_tailsitter.c | |
| guidance_indi_hybrid_tailsitter.h | |
| guidance_indi_quadrotor.c | |
| guidance_module.h | |
| Guidance in a module file. | |
| guidance_oneloop.c | |
| A dummy guidance module to run the oneloop_andi controller. | |
| guidance_oneloop.h | |
| A dummy guidance mode to run the oneloop_andi controller. | |
| guidance_pid.c | |
| Guidance controller with PID for rotorcrafts. | |
| guidance_pid.h | |
| Guidance controller with PID for rotorcrafts. | |
| guidance_plane.c | |
| Guidance controller for planes with PID compatible with the rotorcraft firmware no airspeed control. | |
| guidance_plane.h | |
| Guidance controller for planes in rotorcraft firmware using basic PID controller no airspeed control. | |
| guidance_v.c | |
| Vertical guidance for rotorcrafts. | |
| guidance_v.h | |
| Vertical guidance for rotorcrafts. | |
| guidance_v_adapt.c | |
| Adaptation block of the vertical guidance. | |
| guidance_v_adapt.h | |
| Adaptation block of the vertical guidance. | |
| guidance_v_ref.c | |
| Reference generation for vertical guidance. | |
| guidance_v_ref.h | |
| Reference generation for vertical guidance. | |