|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Open Loop guidance for making a flip. More...
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | guidance_flip_enter (void) |
| void | guidance_flip_run (void) |
Open Loop guidance for making a flip.
You need to tune this before using. When entering this mode it saves the previous guidance mode and changes AUTO2 back to the previous mode after finishing the flip. Use it with caution!
Definition in file guidance_flip.h.
Definition at line 56 of file guidance_flip.c.
References autopilot_get_mode(), autopilot_mode_old, flip_counter, flip_rollout, flip_state, heading_save, and stabilization_attitude_get_heading_i().
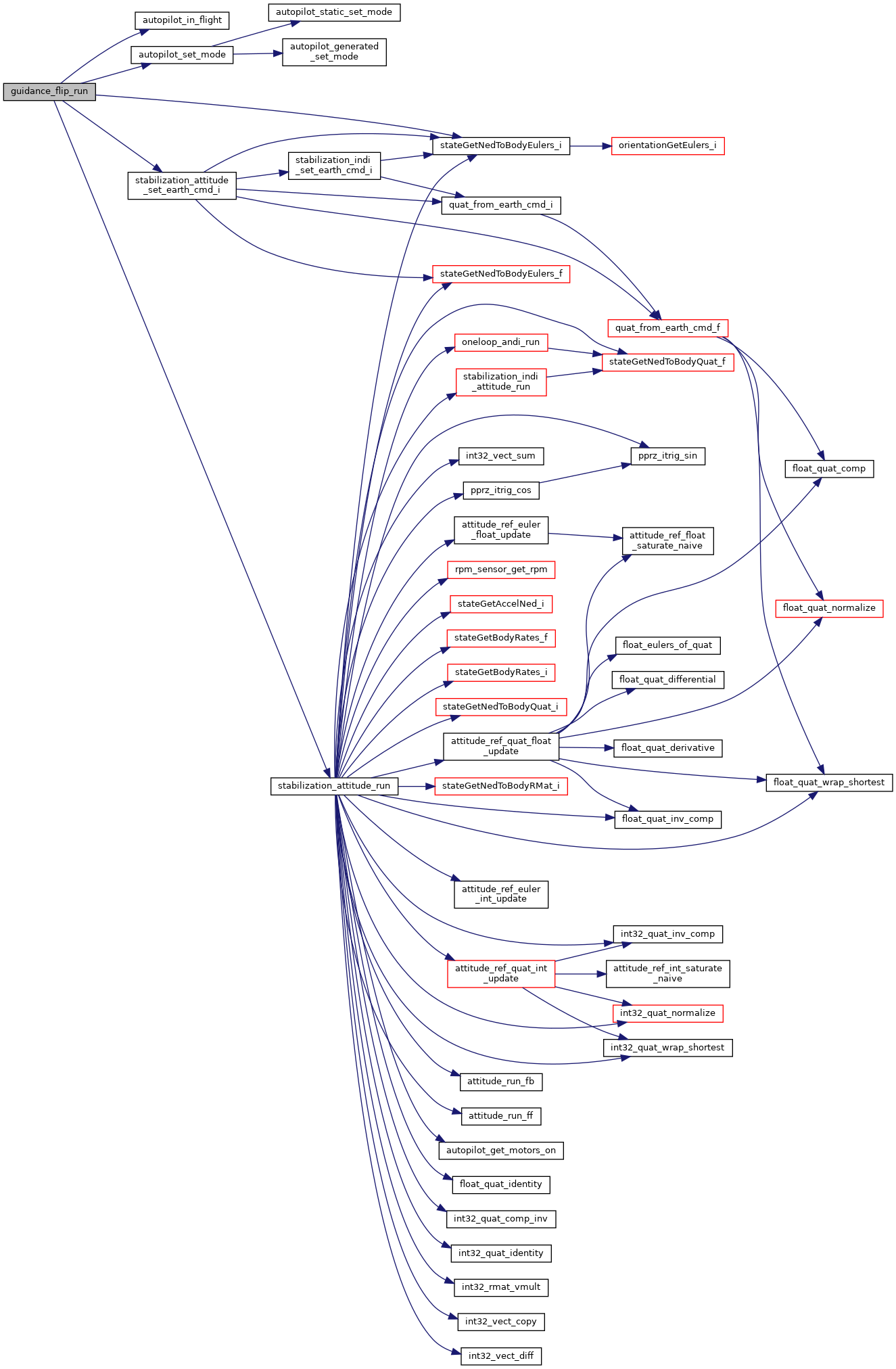
Here is the call graph for this function:Definition at line 65 of file guidance_flip.c.
References ANGLE_BFP_OF_REAL, autopilot_in_flight(), autopilot_mode_auto2, autopilot_mode_old, autopilot_set_mode(), BFP_OF_REAL, Stabilization::cmd, FINAL_THRUST_LEVEL, FIRST_THRUST_DURATION, flip_cmd_earth, flip_counter, flip_rollout, flip_state, foo, heading_save, Int32Eulers::phi, FloatEulers::psi, stab_att_sp_euler, stabilization, stabilization_attitude_run(), stateGetNedToBodyEulers_i(), STOP_ROLL_CMD_ANGLE, Int32Vect2::x, and Int32Vect2::y.
Here is the call graph for this function: