|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
A dummy guidance mode to run the oneloop_andi controller. More...
#include "firmwares/rotorcraft/oneloop/oneloop_andi.h" Include dependency graph for guidance_oneloop.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for guidance_oneloop.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Enumerations | |
| enum | GuidanceOneloop_HMode { GUIDANCE_ONELOOP_H_POS , GUIDANCE_ONELOOP_H_SPEED , GUIDANCE_ONELOOP_H_ACCEL } |
| enum | GuidanceOneloop_VMode { GUIDANCE_ONELOOP_V_POS , GUIDANCE_ONELOOP_V_SPEED , GUIDANCE_ONELOOP_V_ACCEL } |
Functions | |
| struct StabilizationSetpoint | guidance_oneloop_run_mode (bool in_flight, struct HorizontalGuidance *gh, struct VerticalGuidance *gv, enum GuidanceOneloop_HMode h_mode, enum GuidanceOneloop_VMode v_mode) |
A dummy guidance mode to run the oneloop_andi controller.
Definition in file guidance_oneloop.h.
| Enumerator | |
|---|---|
| GUIDANCE_ONELOOP_H_POS | |
| GUIDANCE_ONELOOP_H_SPEED | |
| GUIDANCE_ONELOOP_H_ACCEL | |
Definition at line 33 of file guidance_oneloop.h.
| Enumerator | |
|---|---|
| GUIDANCE_ONELOOP_V_POS | |
| GUIDANCE_ONELOOP_V_SPEED | |
| GUIDANCE_ONELOOP_V_ACCEL | |
Definition at line 39 of file guidance_oneloop.h.
|
extern |
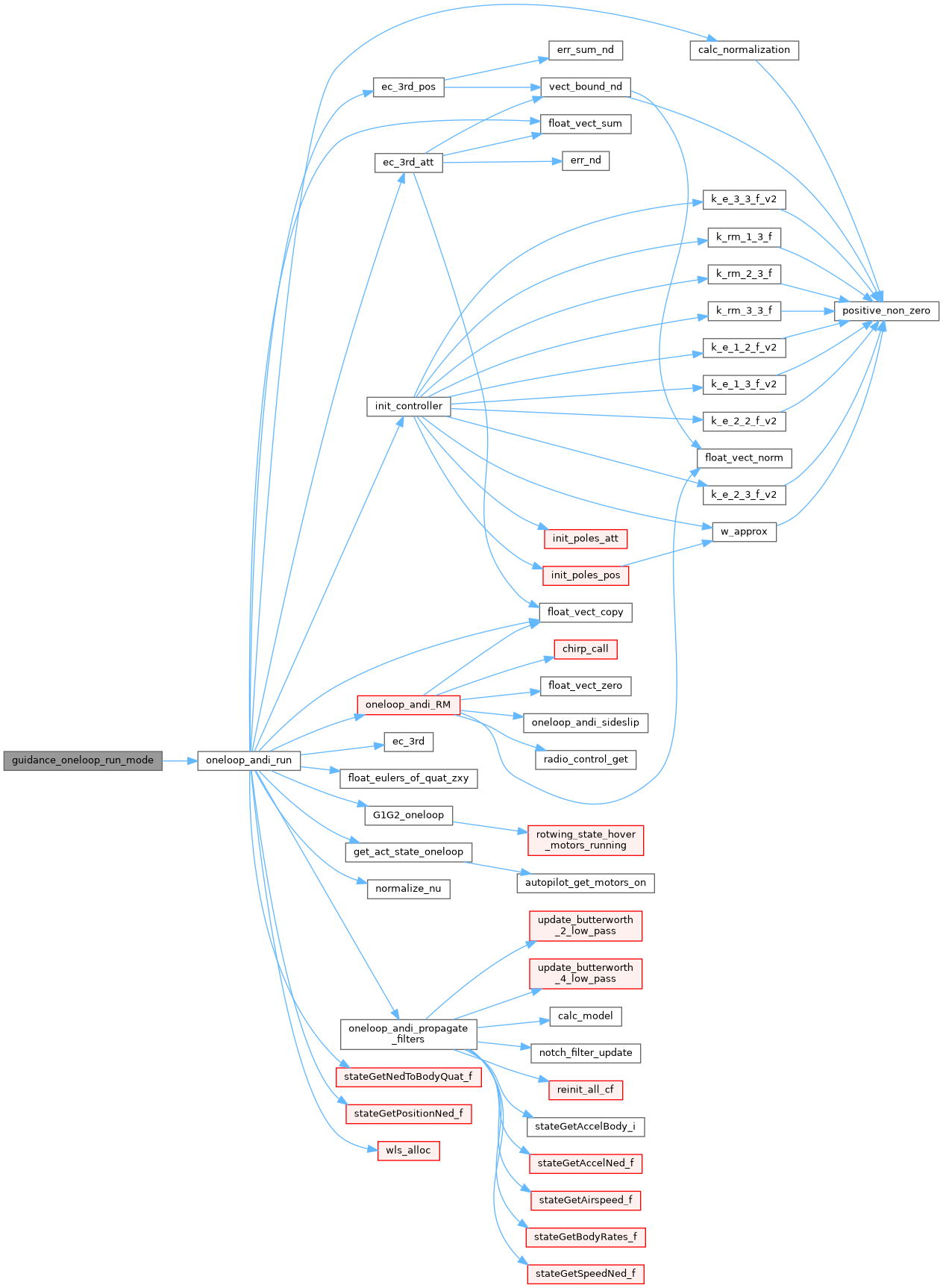
Definition at line 84 of file guidance_oneloop.c.
References ACCEL_FLOAT_OF_BFP, foo, GUIDANCE_ONELOOP_H_POS, GUIDANCE_ONELOOP_H_SPEED, GUIDANCE_ONELOOP_V_POS, GUIDANCE_ONELOOP_V_SPEED, OneloopGeneral::half_loop, oneloop_andi, oneloop_andi_run(), POS_FLOAT_OF_BFP, StabilizationSetpoint::sp, SPEED_FLOAT_OF_BFP, and FloatVect3::x.
Referenced by guidance_h_run_accel(), guidance_h_run_pos(), and guidance_h_run_speed().
Here is the call graph for this function: Here is the caller graph for this function: