|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Adaptation block of the vertical guidance. More...
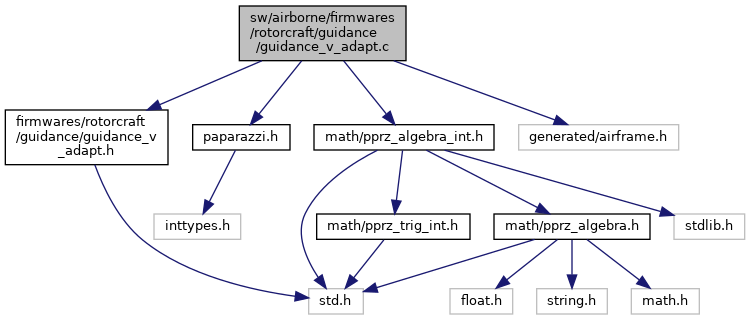
#include "firmwares/rotorcraft/guidance/guidance_v_adapt.h"#include "paparazzi.h"#include "math/pprz_algebra_int.h"#include "generated/airframe.h" Include dependency graph for guidance_v_adapt.c:
Include dependency graph for guidance_v_adapt.c:Go to the source code of this file.
Macros | |
| #define | GUIDANCE_V_ADAPT_INITIAL_HOVER_THROTTLE 0.3 |
| Initial hover throttle as factor of MAX_PPRZ. | |
| #define | GUIDANCE_V_ADAPT_MIN_HOVER_THROTTLE 0.2 |
| Minimum hover throttle as factor of MAX_PPRZ. | |
| #define | GUIDANCE_V_ADAPT_MAX_HOVER_THROTTLE 0.75 |
| Maximum hover throttle as factor of MAX_PPRZ. | |
| #define | GUIDANCE_V_ADAPT_NOISE_FACTOR 1.0 |
| Adapt noise factor. | |
| #define | GUIDANCE_V_ADAPT_MAX_ACCEL 4.0 |
| Filter is not fed if accel values are more than +/- MAX_ACCEL. | |
| #define | GUIDANCE_V_ADAPT_MAX_CMD 0.9 |
| Filter is not fed if command values are out of a % of 0/MAX_PPRZ. | |
| #define | GUIDANCE_V_ADAPT_MIN_CMD 0.1 |
| #define | GV_ADAPT_SYS_NOISE_F 0.00005 |
| #define | GV_ADAPT_SYS_NOISE BFP_OF_REAL(GV_ADAPT_SYS_NOISE_F, GV_ADAPT_P_FRAC) |
| #define | GV_ADAPT_MEAS_NOISE_HOVER_F (50.0*GUIDANCE_V_ADAPT_NOISE_FACTOR) |
| #define | GV_ADAPT_MEAS_NOISE_HOVER BFP_OF_REAL(GV_ADAPT_MEAS_NOISE_HOVER_F, GV_ADAPT_P_FRAC) |
| #define | GV_ADAPT_MEAS_NOISE_OF_ZD (100.0*GUIDANCE_V_ADAPT_NOISE_FACTOR) |
| #define | GV_ADAPT_P0_F 0.1 |
| #define | K_FRAC 12 |
Functions | |
| void | gv_adapt_init (void) |
| void | gv_adapt_run (int32_t zdd_meas, int32_t thrust_applied, int32_t zd_ref) |
| Adaptation function. | |
Variables | |
| int32_t | gv_adapt_X |
| State of the estimator. | |
| int32_t | gv_adapt_P |
| Covariance. | |
| int32_t | gv_adapt_Xmeas |
| Measurement. | |
| static const int32_t | gv_adapt_P0 = BFP_OF_REAL(GV_ADAPT_P0_F, GV_ADAPT_P_FRAC) |
| static const int32_t | gv_adapt_X0 |
Adaptation block of the vertical guidance.
This is a dimension one kalman filter estimating the ratio of vertical acceleration over thrust command ( ~ inverse of the mass ) needed by the invert dynamic model to produce a nominal command.
Definition in file guidance_v_adapt.c.
| #define GUIDANCE_V_ADAPT_INITIAL_HOVER_THROTTLE 0.3 |
Initial hover throttle as factor of MAX_PPRZ.
Should be a value between GUIDANCE_V_ADAPT_MIN_HOVER_THROTTLE and GUIDANCE_V_ADAPT_MAX_HOVER_THROTTLE. If the nominal hover throttle is defined use it otherwise it is better to start with low thrust and let it rise as the adaptive filter finds the vehicle needs more thrust.
Definition at line 47 of file guidance_v_adapt.c.
| #define GUIDANCE_V_ADAPT_MAX_ACCEL 4.0 |
Filter is not fed if accel values are more than +/- MAX_ACCEL.
MAX_ACCEL is a positive value in m/s^2
Definition at line 84 of file guidance_v_adapt.c.
| #define GUIDANCE_V_ADAPT_MAX_CMD 0.9 |
Filter is not fed if command values are out of a % of 0/MAX_PPRZ.
MAX_CMD and MIN_CMD must be between 0 and 1 with MIN_CMD < MAX_CMD
Definition at line 91 of file guidance_v_adapt.c.
| #define GUIDANCE_V_ADAPT_MAX_HOVER_THROTTLE 0.75 |
Maximum hover throttle as factor of MAX_PPRZ.
With the default of 0.75 the nominal hover throttle will never go over 75% of max throttle.
Definition at line 66 of file guidance_v_adapt.c.
| #define GUIDANCE_V_ADAPT_MIN_CMD 0.1 |
Definition at line 94 of file guidance_v_adapt.c.
| #define GUIDANCE_V_ADAPT_MIN_HOVER_THROTTLE 0.2 |
Minimum hover throttle as factor of MAX_PPRZ.
With the default of 0.2 the nominal hover throttle will never go lower than 20%.
Definition at line 57 of file guidance_v_adapt.c.
| #define GUIDANCE_V_ADAPT_NOISE_FACTOR 1.0 |
Adapt noise factor.
Smaller values will make the filter to adapt faster. Bigger values (slower adaptation) make the filter more robust to external pertubations. Factor should always be >0
Definition at line 76 of file guidance_v_adapt.c.
| #define GV_ADAPT_MEAS_NOISE_HOVER BFP_OF_REAL(GV_ADAPT_MEAS_NOISE_HOVER_F, GV_ADAPT_P_FRAC) |
Definition at line 111 of file guidance_v_adapt.c.
| #define GV_ADAPT_MEAS_NOISE_HOVER_F (50.0*GUIDANCE_V_ADAPT_NOISE_FACTOR) |
Definition at line 110 of file guidance_v_adapt.c.
| #define GV_ADAPT_MEAS_NOISE_OF_ZD (100.0*GUIDANCE_V_ADAPT_NOISE_FACTOR) |
Definition at line 112 of file guidance_v_adapt.c.
| #define GV_ADAPT_P0_F 0.1 |
Definition at line 115 of file guidance_v_adapt.c.
| #define GV_ADAPT_SYS_NOISE BFP_OF_REAL(GV_ADAPT_SYS_NOISE_F, GV_ADAPT_P_FRAC) |
Definition at line 107 of file guidance_v_adapt.c.
| #define GV_ADAPT_SYS_NOISE_F 0.00005 |
Definition at line 105 of file guidance_v_adapt.c.
| #define K_FRAC 12 |
Definition at line 126 of file guidance_v_adapt.c.
Definition at line 120 of file guidance_v_adapt.c.
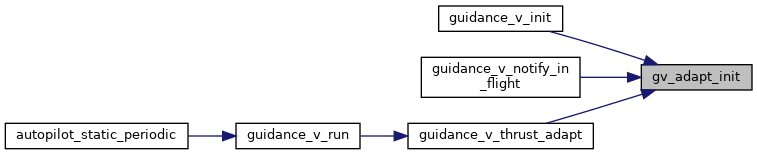
References gv_adapt_P, gv_adapt_P0, gv_adapt_X, and gv_adapt_X0.
Referenced by guidance_v_init(), guidance_v_notify_in_flight(), and guidance_v_thrust_adapt().
Here is the caller graph for this function:Adaptation function.
| zdd_meas | vert accel measurement in m/s^2 with INT32_ACCEL_FRAC |
| thrust_applied | controller input [0 : MAX_PPRZ] |
| zd_ref | vertical speed reference in m/s with INT32_SPEED_FRAC |
Definition at line 133 of file guidance_v_adapt.c.
References ACCEL_BFP_OF_REAL, BFP_OF_REAL, E, foo, GUIDANCE_V_ADAPT_MAX_ACCEL, GUIDANCE_V_ADAPT_MAX_CMD, GUIDANCE_V_ADAPT_MAX_HOVER_THROTTLE, GUIDANCE_V_ADAPT_MIN_CMD, GUIDANCE_V_ADAPT_MIN_HOVER_THROTTLE, GV_ADAPT_MEAS_NOISE_HOVER, GV_ADAPT_MEAS_NOISE_OF_ZD, gv_adapt_P, gv_adapt_P0, GV_ADAPT_P_FRAC, GV_ADAPT_SYS_NOISE, gv_adapt_X, GV_ADAPT_X_FRAC, gv_adapt_Xmeas, INT32_ACCEL_FRAC, INT32_SPEED_FRAC, K, K_FRAC, MAX_PPRZ, and ref.
Referenced by guidance_v_thrust_adapt().
Here is the caller graph for this function:| int32_t gv_adapt_P |
Covariance.
fixed point representation with GV_ADAPT_P_FRAC Q13.18
Definition at line 100 of file guidance_v_adapt.c.
Referenced by gv_adapt_init(), gv_adapt_run(), and send_vert_loop().
|
static |
Definition at line 116 of file guidance_v_adapt.c.
Referenced by gv_adapt_init(), and gv_adapt_run().
| int32_t gv_adapt_X |
State of the estimator.
fixed point representation with GV_ADAPT_X_FRAC Q13.18
Definition at line 99 of file guidance_v_adapt.c.
Referenced by guidance_pid_v_run(), gv_adapt_init(), gv_adapt_run(), and send_vert_loop().
Definition at line 117 of file guidance_v_adapt.c.
Referenced by gv_adapt_init().
| int32_t gv_adapt_Xmeas |
Measurement.
Definition at line 101 of file guidance_v_adapt.c.
Referenced by gv_adapt_run(), and send_vert_loop().