|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
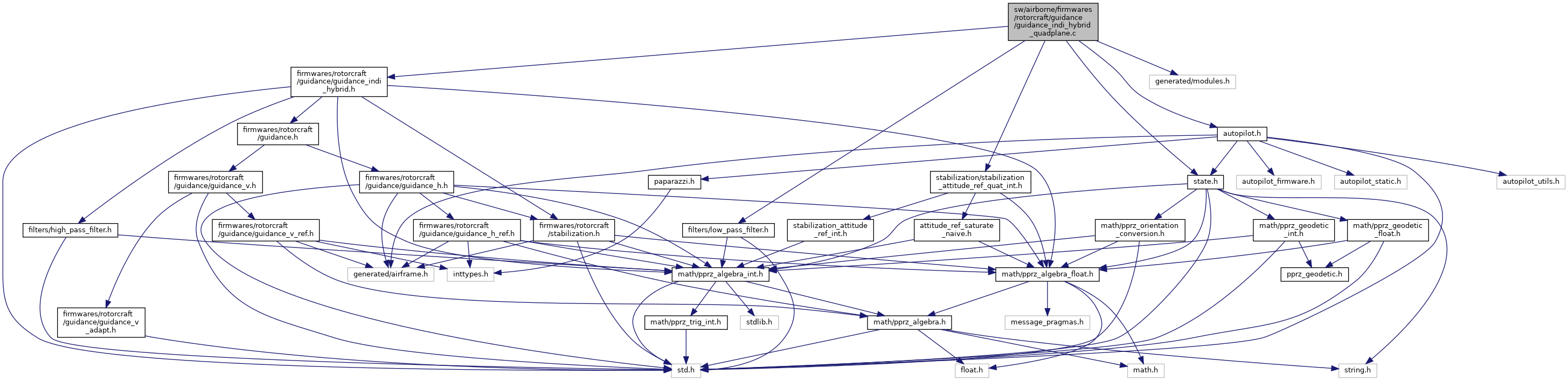
#include "firmwares/rotorcraft/guidance/guidance_indi_hybrid.h"#include "filters/low_pass_filter.h"#include "state.h"#include "autopilot.h"#include "generated/modules.h" Include dependency graph for guidance_indi_hybrid_quadplane.c:
Include dependency graph for guidance_indi_hybrid_quadplane.c:Go to the source code of this file.
Macros | |
| #define | GUIDANCE_INDI_BODYZ_FILTER_CUTOFF 3.0 |
| #define | GUIDANCE_INDI_PITCH_EFF_SCALING 1.0 |
Functions | |
| void | guidance_indi_quadplane_init (void) |
| Call upon entering indi guidance. | |
| void | guidance_indi_quadplane_propagate_filters (void) |
| Low pass the accelerometer measurements to remove noise from vibrations. | |
| void | guidance_indi_calcg_wing (float Gmat[GUIDANCE_INDI_HYBRID_V][GUIDANCE_INDI_HYBRID_U], struct FloatVect3 a_diff, float body_v[GUIDANCE_INDI_HYBRID_V]) |
| Perform WLS. | |
| void WEAK | guidance_indi_hybrid_set_wls_settings (float body_v[3], float roll_angle, float pitch_angle) |
| bool | autopilot_in_flight_end_detection (bool motors_on UNUSED) |
| Quadplanes can still be in-flight with COMMAND_THRUST==0 and can even soar not descending in updrafts with all thrust off. | |
Variables | |
| Butterworth2LowPass | accel_bodyz_filt |
| #define GUIDANCE_INDI_BODYZ_FILTER_CUTOFF 3.0 |
Definition at line 51 of file guidance_indi_hybrid_quadplane.c.
| #define GUIDANCE_INDI_PITCH_EFF_SCALING 1.0 |
Quadplanes can still be in-flight with COMMAND_THRUST==0 and can even soar not descending in updrafts with all thrust off.
Definition at line 162 of file guidance_indi_hybrid_quadplane.c.
| void guidance_indi_calcg_wing | ( | float | Gmat[GUIDANCE_INDI_HYBRID_V][GUIDANCE_INDI_HYBRID_U], |
| struct FloatVect3 | a_diff, | ||
| float | body_v[GUIDANCE_INDI_HYBRID_V] | ||
| ) |
Perform WLS.
| Gmat | Dynamics matrix |
| a_diff | acceleration errors in earth frame |
| body_v | 3D vector to write the control objective v |
Definition at line 86 of file guidance_indi_hybrid_quadplane.c.
Definition at line 134 of file guidance_indi_hybrid_quadplane.c.
References Stabilization::cmd, foo, g1g2, guidance_indi_max_bank, GUIDANCE_INDI_MAX_PITCH, GUIDANCE_INDI_MIN_PITCH, guidance_indi_pitch_pref_deg, guidance_indi_thrust_z_eff, MAX_PPRZ, and stabilization.
Referenced by guidance_indi_run().
Here is the caller graph for this function:Call upon entering indi guidance.
Definition at line 61 of file guidance_indi_hybrid_quadplane.c.
References accel_bodyz_filt, foo, GUIDANCE_INDI_BODYZ_FILTER_CUTOFF, and init_butterworth_2_low_pass().
Here is the call graph for this function:Low pass the accelerometer measurements to remove noise from vibrations.
The roll and pitch also need to be filtered to synchronize them with the acceleration Called as a periodic function with PERIODIC_FREQ
Definition at line 73 of file guidance_indi_hybrid_quadplane.c.
References accel_bodyz_filt, ACCEL_FLOAT_OF_BFP, foo, stateGetAccelBody_i(), and update_butterworth_2_low_pass().
Here is the call graph for this function:| Butterworth2LowPass accel_bodyz_filt |
Definition at line 55 of file guidance_indi_hybrid_quadplane.c.
Referenced by guidance_indi_calcg_wing(), guidance_indi_quadplane_init(), and guidance_indi_quadplane_propagate_filters().