|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Vertical guidance for rotorcrafts. More...
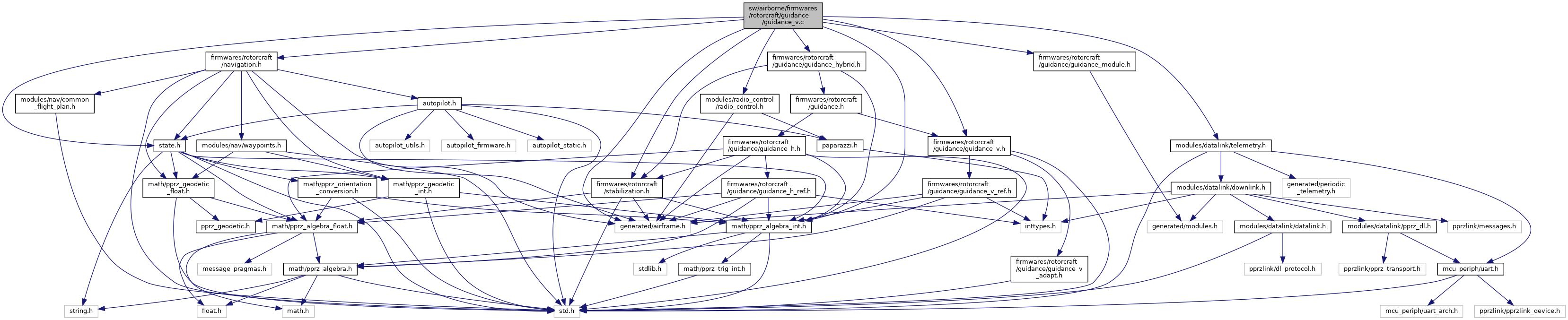
#include "generated/airframe.h"#include "firmwares/rotorcraft/guidance/guidance_v.h"#include "firmwares/rotorcraft/guidance/guidance_module.h"#include "firmwares/rotorcraft/guidance/guidance_hybrid.h"#include "modules/radio_control/radio_control.h"#include "firmwares/rotorcraft/stabilization.h"#include "firmwares/rotorcraft/navigation.h"#include "modules/core/abi.h"#include "state.h"#include "math/pprz_algebra_int.h"#include "modules/datalink/telemetry.h" Include dependency graph for guidance_v.c:
Include dependency graph for guidance_v.c:Go to the source code of this file.
Variables | |
| struct VerticalGuidance | guidance_v |
| static bool | desired_zd_updated |
| static int | guidance_v_guided_mode |
| static abi_event | rc_ev |
Vertical guidance for rotorcrafts.
Definition in file guidance_v.c.
Definition at line 49 of file guidance_v.c.
| #define GUIDANCE_V_GUIDED_MODE_ALL 3 |
Definition at line 67 of file guidance_v.c.
| #define GUIDANCE_V_GUIDED_MODE_CLIMB 1 |
Definition at line 65 of file guidance_v.c.
| #define GUIDANCE_V_GUIDED_MODE_THROTTLE 2 |
Definition at line 66 of file guidance_v.c.
| #define GUIDANCE_V_GUIDED_MODE_ZHOLD 0 |
Definition at line 64 of file guidance_v.c.
| #define GUIDANCE_V_MAX_RC_CLIMB_SPEED GUIDANCE_V_REF_MIN_ZD |
Definition at line 53 of file guidance_v.c.
| #define GUIDANCE_V_MAX_RC_DESCENT_SPEED GUIDANCE_V_REF_MAX_ZD |
Definition at line 57 of file guidance_v.c.
| #define GUIDANCE_V_NOMINAL_HOVER_THROTTLE 0.4 |
Definition at line 43 of file guidance_v.c.
| #define GUIDANCE_V_RC_ID ABI_BROADCAST |
Definition at line 72 of file guidance_v.c.
get the cosine of the angle between thrust vector and gravity vector
Definition at line 173 of file guidance_v.c.
References BFP_OF_REAL, foo, INT32_TRIG_FRAC, Int32RMat::m, and stateGetNedToBodyRMat_i().
Referenced by guidance_v_thrust_adapt().
Here is the call graph for this function: Here is the caller graph for this function:| struct ThrustSetpoint guidance_v_from_nav | ( | bool | in_flight | ) |
Set guidance setpoint from NAV and run hover loop.
Definition at line 303 of file guidance_v.c.
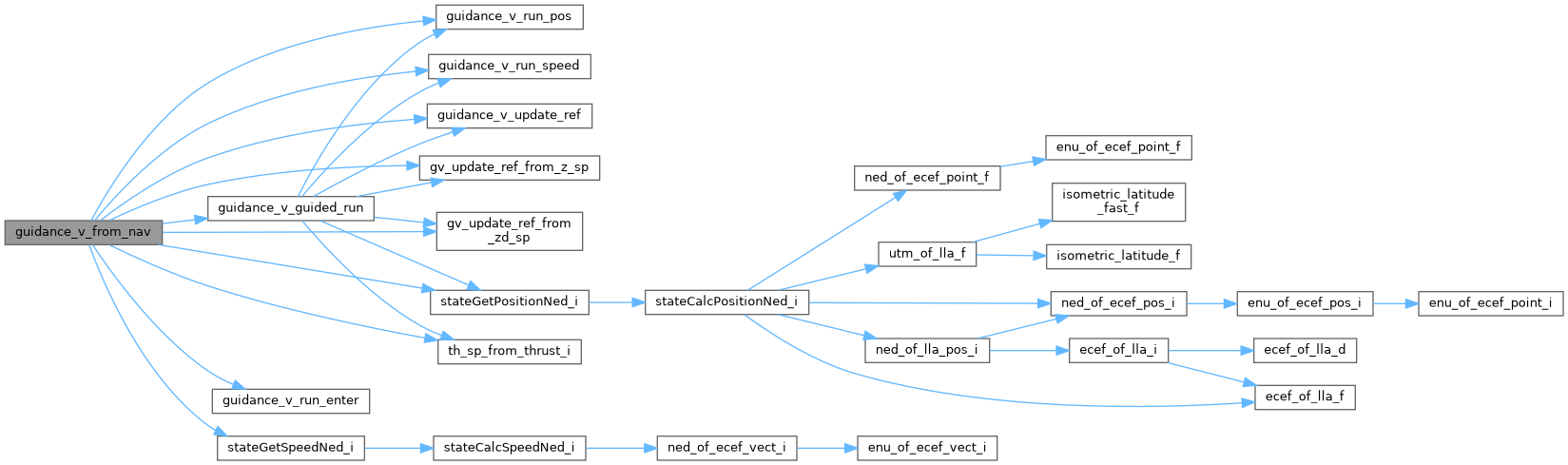
References RotorcraftNavigation::climb, guidance_v, guidance_v_guided_run(), guidance_v_run_enter(), guidance_v_run_pos(), guidance_v_run_speed(), guidance_v_update_ref(), GuidanceVSetRef, gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), nav, RotorcraftNavigation::nav_altitude, NAV_VERTICAL_MODE_ALT, NAV_VERTICAL_MODE_CLIMB, NAV_VERTICAL_MODE_GUIDED, NAV_VERTICAL_MODE_MANUAL, POS_BFP_OF_REAL, ThrustSetpoint::sp, SPEED_BFP_OF_REAL, stateGetPositionNed_i(), stateGetSpeedNed_i(), th_sp_from_thrust_i(), RotorcraftNavigation::throttle, THRUST_AXIS_Z, THRUST_SP_SET_ZERO, RotorcraftNavigation::vertical_mode, NedCoor_i::z, VerticalGuidance::z_sp, VerticalGuidance::zd_sp, and VerticalGuidance::zdd_sp.
Referenced by guidance_v_run().
Here is the call graph for this function: Here is the caller graph for this function:Enter GUIDED mode control.
Definition at line 334 of file guidance_v.c.
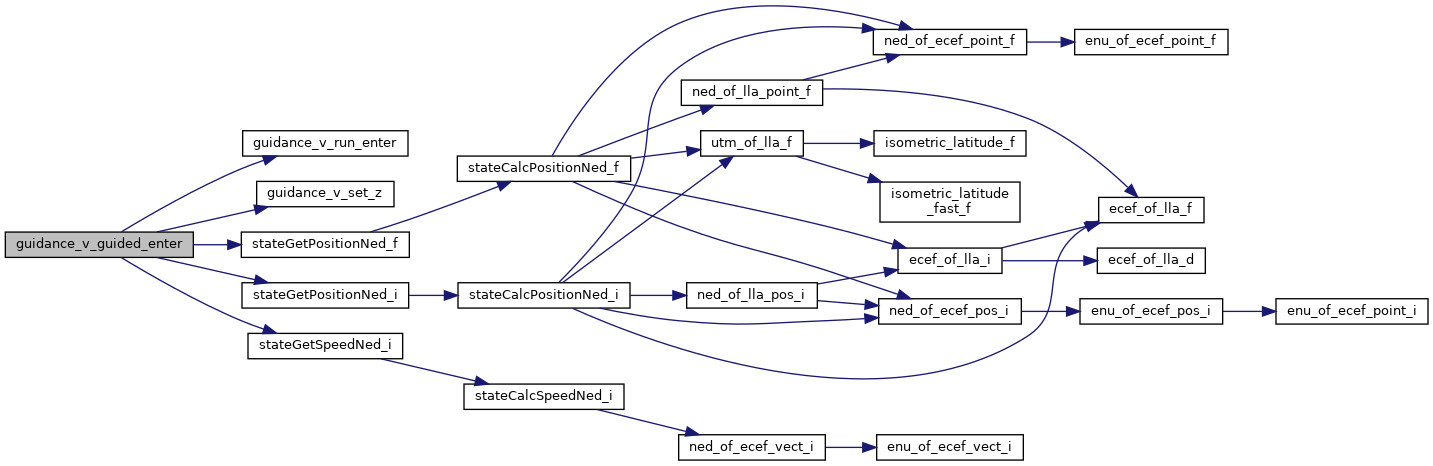
References guidance_v_run_enter(), guidance_v_set_z(), GuidanceVSetRef, stateGetPositionNed_f(), stateGetPositionNed_i(), and stateGetSpeedNed_i().
Referenced by guidance_v_mode_changed().
Here is the call graph for this function: Here is the caller graph for this function:| struct ThrustSetpoint guidance_v_guided_run | ( | bool | in_flight | ) |
Run GUIDED mode control.
Definition at line 344 of file guidance_v.c.
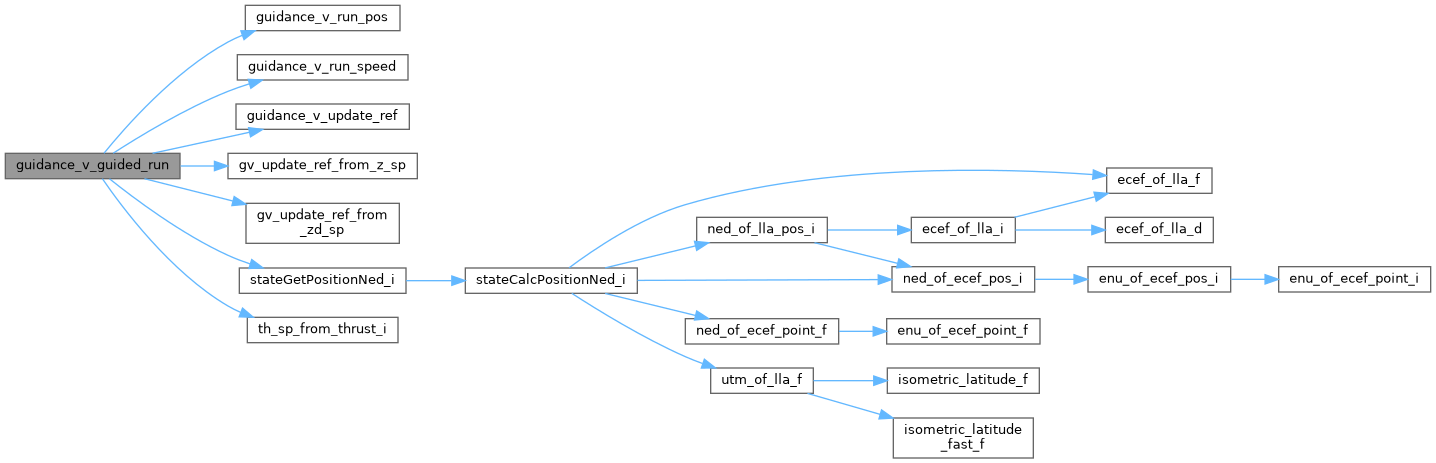
References guidance_v, guidance_v_guided_mode, GUIDANCE_V_GUIDED_MODE_ALL, GUIDANCE_V_GUIDED_MODE_CLIMB, GUIDANCE_V_GUIDED_MODE_THROTTLE, GUIDANCE_V_GUIDED_MODE_ZHOLD, guidance_v_run_pos(), guidance_v_run_speed(), guidance_v_set_ref(), guidance_v_update_ref(), gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), ThrustSetpoint::sp, stateGetPositionNed_i(), VerticalGuidance::th_sp, th_sp_from_thrust_i(), THRUST_AXIS_Z, THRUST_SP_SET_ZERO, NedCoor_i::z, VerticalGuidance::z_sp, VerticalGuidance::zd_sp, and VerticalGuidance::zdd_sp.
Referenced by guidance_v_from_nav(), and guidance_v_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 92 of file guidance_v.c.
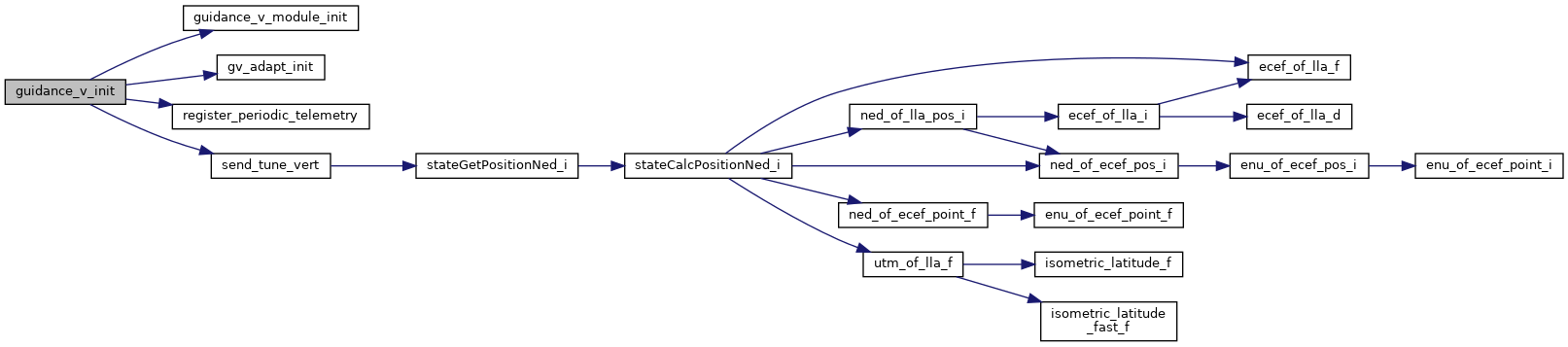
References BFP_OF_REAL, DefaultPeriodic, desired_zd_updated, foo, guidance_v, guidance_v_guided_mode, GUIDANCE_V_GUIDED_MODE_ZHOLD, GUIDANCE_V_MODE_KILL, GUIDANCE_V_NOMINAL_HOVER_THROTTLE, GUIDANCE_V_RC_ID, gv_adapt_init(), INT32_TRIG_FRAC, VerticalGuidance::mode, VerticalGuidance::nominal_throttle, rc_cb(), rc_ev, register_periodic_telemetry(), send_tune_vert(), and VerticalGuidance::thrust_coeff.
Here is the call graph for this function:Definition at line 133 of file guidance_v.c.
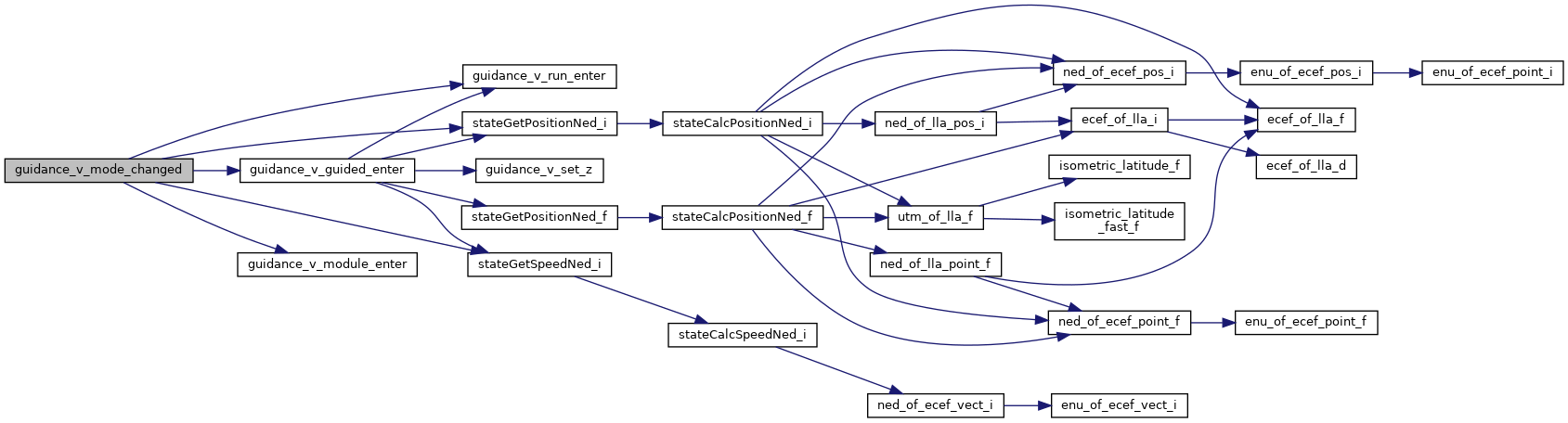
References foo, guidance_v, guidance_v_guided_enter(), GUIDANCE_V_MODE_CLIMB, GUIDANCE_V_MODE_GUIDED, GUIDANCE_V_MODE_HOVER, GUIDANCE_V_MODE_NAV, GUIDANCE_V_MODE_RC_CLIMB, guidance_v_run_enter(), GuidanceVSetRef, VerticalGuidance::mode, stateGetPositionNed_i(), stateGetSpeedNed_i(), VerticalGuidance::zd_sp, and VerticalGuidance::zdd_sp.
Referenced by autopilot_static_set_mode(), control_mixing_heewing_attitude_direct_enter(), control_mixing_heewing_attitude_plane_enter(), control_mixing_heewing_nav_enter(), and guidance_module_enter().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 165 of file guidance_v.c.
References gv_adapt_init().
Here is the call graph for this function:| struct ThrustSetpoint guidance_v_run | ( | bool | in_flight | ) |
Guidance vertical run functions.
Definition at line 223 of file guidance_v.c.
References desired_zd_updated, guidance_v, guidance_v_from_nav(), guidance_v_guided_mode, GUIDANCE_V_GUIDED_MODE_ZHOLD, guidance_v_guided_run(), GUIDANCE_V_MODE_CLIMB, GUIDANCE_V_MODE_GUIDED, GUIDANCE_V_MODE_HOVER, GUIDANCE_V_MODE_NAV, GUIDANCE_V_MODE_RC_CLIMB, GUIDANCE_V_MODE_RC_DIRECT, guidance_v_run_speed(), guidance_v_thrust_adapt(), gv_update_ref_from_zd_sp(), VerticalGuidance::mode, VerticalGuidance::rc_delta_t, VerticalGuidance::rc_zd_sp, stateGetPositionNed_i(), th_sp_from_thrust_i(), VerticalGuidance::thrust, THRUST_AXIS_Z, THRUST_SP_SET_ZERO, NedCoor_i::z, VerticalGuidance::z_sp, and VerticalGuidance::zd_sp.
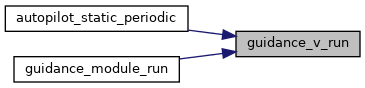
Referenced by autopilot_static_periodic(), control_mixing_heewing_attitude_direct(), control_mixing_heewing_attitude_plane(), control_mixing_heewing_nav_run(), and guidance_module_run().
Here is the call graph for this function: Here is the caller graph for this function:Set z position, velocity and acceleration setpoint.
| z | Setpoint (down is positive) in meters. |
| vz | Setpoint (down is positive) in meters/second. |
| az | Setpoint (down is positive) in meters/second². |
Definition at line 411 of file guidance_v.c.
References ACCEL_BFP_OF_REAL, guidance_v, guidance_v_guided_mode, GUIDANCE_V_GUIDED_MODE_ZHOLD, POS_BFP_OF_REAL, SPEED_BFP_OF_REAL, VerticalGuidance::z_sp, VerticalGuidance::zd_sp, and VerticalGuidance::zdd_sp.
Set guidance ref parameters.
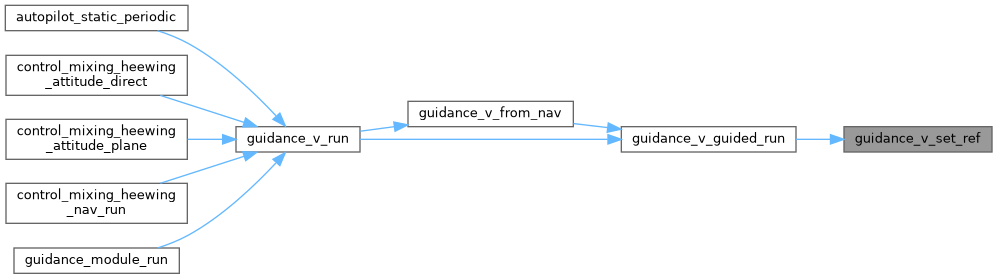
Definition at line 283 of file guidance_v.c.
References guidance_v, gv_set_ref(), VerticalGuidance::z_ref, VerticalGuidance::zd_ref, and VerticalGuidance::zdd_ref.
Referenced by guidance_v_guided_run().
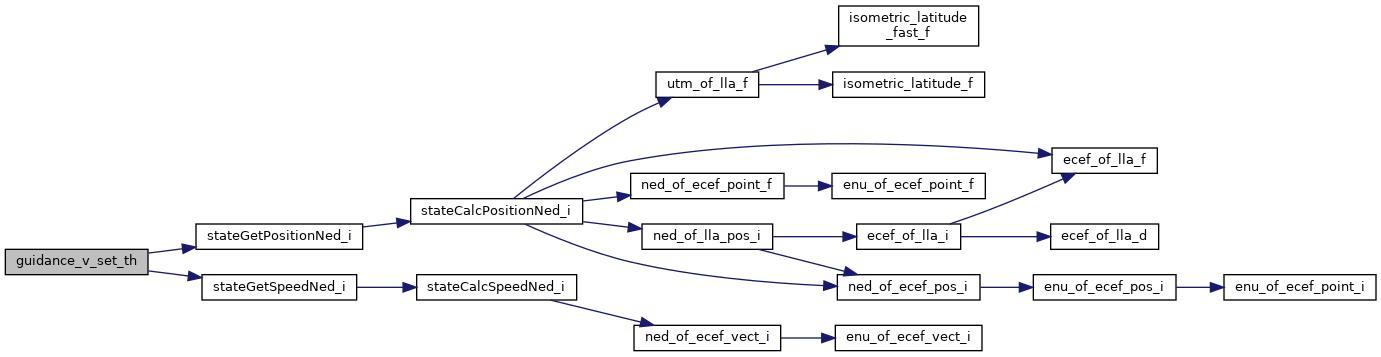
Here is the call graph for this function: Here is the caller graph for this function:Set throttle setpoint.
| th | Throttle setpoint between 0. and 1. |
Definition at line 400 of file guidance_v.c.
References foo, guidance_v, guidance_v_guided_mode, GUIDANCE_V_GUIDED_MODE_THROTTLE, GuidanceVSetRef, MAX_PPRZ, stateGetPositionNed_i(), stateGetSpeedNed_i(), and VerticalGuidance::th_sp.
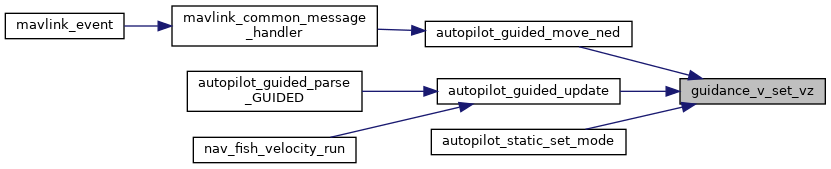
Here is the call graph for this function:Set z velocity setpoint.
| vz | Setpoint (down is positive) in meters/second. |
Definition at line 390 of file guidance_v.c.
References guidance_v, guidance_v_guided_mode, GUIDANCE_V_GUIDED_MODE_CLIMB, SPEED_BFP_OF_REAL, VerticalGuidance::zd_sp, and VerticalGuidance::zdd_sp.
Referenced by autopilot_static_set_mode().
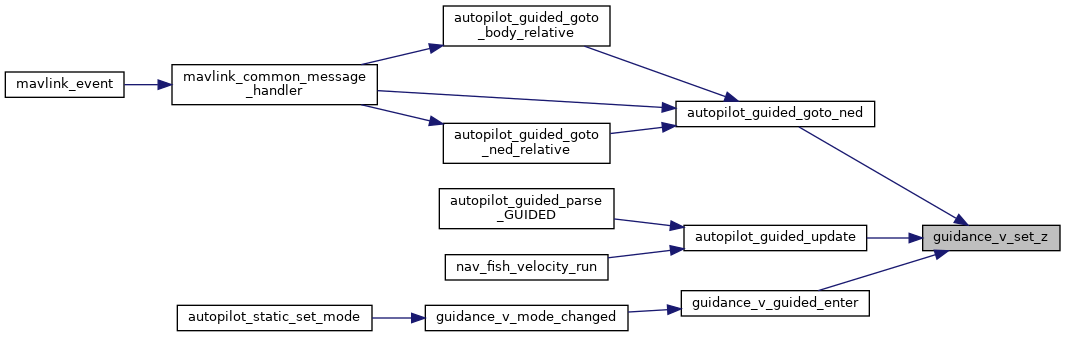
Here is the caller graph for this function:Set z position setpoint.
| z | Setpoint (down is positive) in meters. |
Definition at line 379 of file guidance_v.c.
References guidance_v, guidance_v_guided_mode, GUIDANCE_V_GUIDED_MODE_ZHOLD, POS_BFP_OF_REAL, VerticalGuidance::z_sp, VerticalGuidance::zd_sp, and VerticalGuidance::zdd_sp.
Referenced by guidance_v_guided_enter(), and wedgebug_periodic().
Here is the caller graph for this function:Definition at line 201 of file guidance_v.c.
References Stabilization::cmd, desired_zd_updated, foo, get_vertical_thrust_coeff(), guidance_v, gv_adapt_init(), gv_adapt_run(), INT32_TRIG_FRAC, stabilization, stateGetAccelNed_i(), VerticalGuidance::thrust_coeff, and VerticalGuidance::zd_ref.
Referenced by guidance_v_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 292 of file guidance_v.c.
References desired_zd_updated, foo, guidance_v, gv_z_ref, GV_Z_REF_FRAC, gv_zd_ref, GV_ZD_REF_FRAC, gv_zdd_ref, GV_ZDD_REF_FRAC, INT32_ACCEL_FRAC, INT32_POS_FRAC, INT32_SPEED_FRAC, VerticalGuidance::z_ref, VerticalGuidance::zd_ref, and VerticalGuidance::zdd_ref.
Referenced by guidance_v_from_nav(), and guidance_v_guided_run().
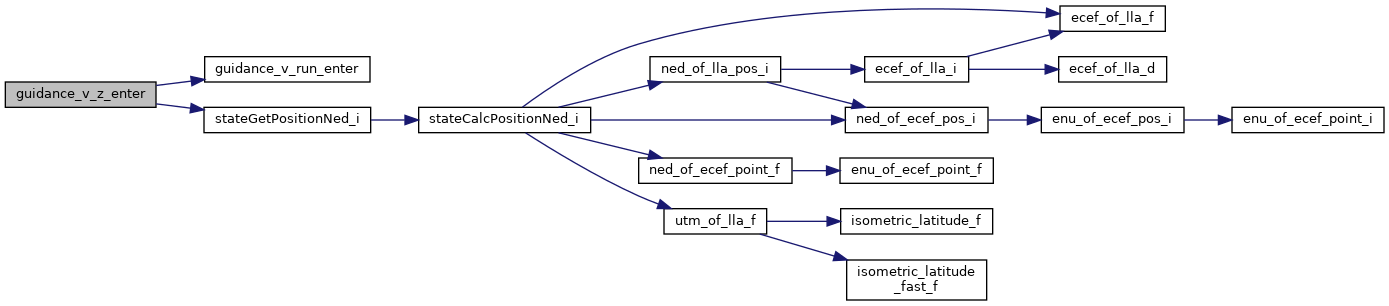
Here is the caller graph for this function:Definition at line 269 of file guidance_v.c.
References guidance_v, guidance_v_run_enter(), GuidanceVSetRef, stateGetPositionNed_i(), NedCoor_i::z, VerticalGuidance::z_sp, VerticalGuidance::zd_sp, and VerticalGuidance::zdd_sp.
Here is the call graph for this function:
|
static |
Definition at line 112 of file guidance_v.c.
References foo, guidance_v, GUIDANCE_V_CLIMB_RC_DEADBAND, GUIDANCE_V_MAX_RC_CLIMB_SPEED, GUIDANCE_V_MAX_RC_DESCENT_SPEED, MAX_PPRZ, RADIO_THROTTLE, VerticalGuidance::rc_delta_t, VerticalGuidance::rc_zd_sp, and SPEED_BFP_OF_REAL.
Referenced by guidance_v_init().
Here is the caller graph for this function:
|
static |
Definition at line 82 of file guidance_v.c.
References dev, foo, guidance_v, stateGetPositionNed_i(), VerticalGuidance::z_ref, VerticalGuidance::z_sp, and VerticalGuidance::zd_ref.
Referenced by guidance_v_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 62 of file guidance_v.c.
Referenced by guidance_v_init(), guidance_v_run(), guidance_v_thrust_adapt(), and guidance_v_update_ref().
| struct VerticalGuidance guidance_v |
Definition at line 60 of file guidance_v.c.
Referenced by guidance_hybrid_vertical(), guidance_pid_h_run(), guidance_v_from_nav(), guidance_v_guided_run(), guidance_v_init(), guidance_v_mode_changed(), guidance_v_run(), guidance_v_set_all(), guidance_v_set_ref(), guidance_v_set_th(), guidance_v_set_vz(), guidance_v_set_z(), guidance_v_thrust_adapt(), guidance_v_update_ref(), guidance_v_z_enter(), optical_flow_landing_init(), rc_cb(), send_fp(), send_status(), send_tune_vert(), and send_vert_loop().
|
static |
Definition at line 69 of file guidance_v.c.
Referenced by guidance_v_guided_run(), guidance_v_init(), guidance_v_run(), guidance_v_set_all(), guidance_v_set_th(), guidance_v_set_vz(), and guidance_v_set_z().
|
static |
Definition at line 75 of file guidance_v.c.
Referenced by guidance_v_init().