|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Guidance controller for planes in rotorcraft firmware using basic PID controller no airspeed control. More...
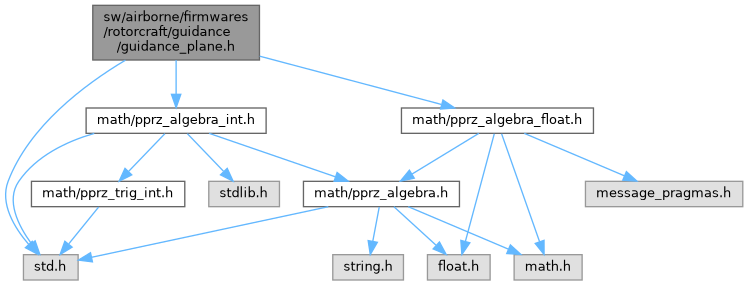
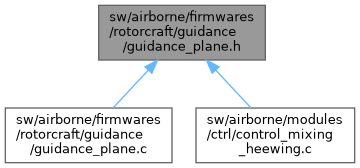
 Include dependency graph for guidance_plane.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for guidance_plane.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | GuidancePlane |
Functions | |
| void | guidance_plane_init (void) |
| void | guidance_plane_enter (void) |
| struct StabilizationSetpoint | guidance_plane_attitude_from_nav (bool in_flight) |
| run horizontal control loop for position and speed control | |
| struct ThrustSetpoint | guidance_plane_thrust_from_nav (bool in_flight) |
| run vertical control loop for position and speed control | |
Variables | |
| struct GuidancePlane | guidance_plane |
| Guidance PID structyre. | |
Guidance controller for planes in rotorcraft firmware using basic PID controller no airspeed control.
Definition in file guidance_plane.h.
| struct GuidancePlane |
Definition at line 39 of file guidance_plane.h.
| Data Fields | ||
|---|---|---|
| float | altitude_setpoint | |
| float | climb_kp | |
| float | climb_max_setpoint | |
| float | climb_setpoint | |
| float | climb_throttle_increment | |
| float | course_kd | |
| float | course_kp | |
| float | course_pre_bank_correction | |
| float | course_setpoint | |
| float | cruise_throttle | |
| float | p_kd | |
| float | p_ki | |
| float | p_kp | |
| float | pitch_cmd | |
| float | pitch_max_setpoint | |
| float | pitch_min_setpoint | |
| float | pitch_of_vz | |
| float | pitch_trim | |
| float | roll_cmd | |
| float | roll_max_setpoint | |
| float | t_kd | |
| float | t_ki | |
| float | t_kp | |
| int32_t | throttle_cmd | |
|
extern |
run horizontal control loop for position and speed control
Definition at line 128 of file guidance_plane.c.
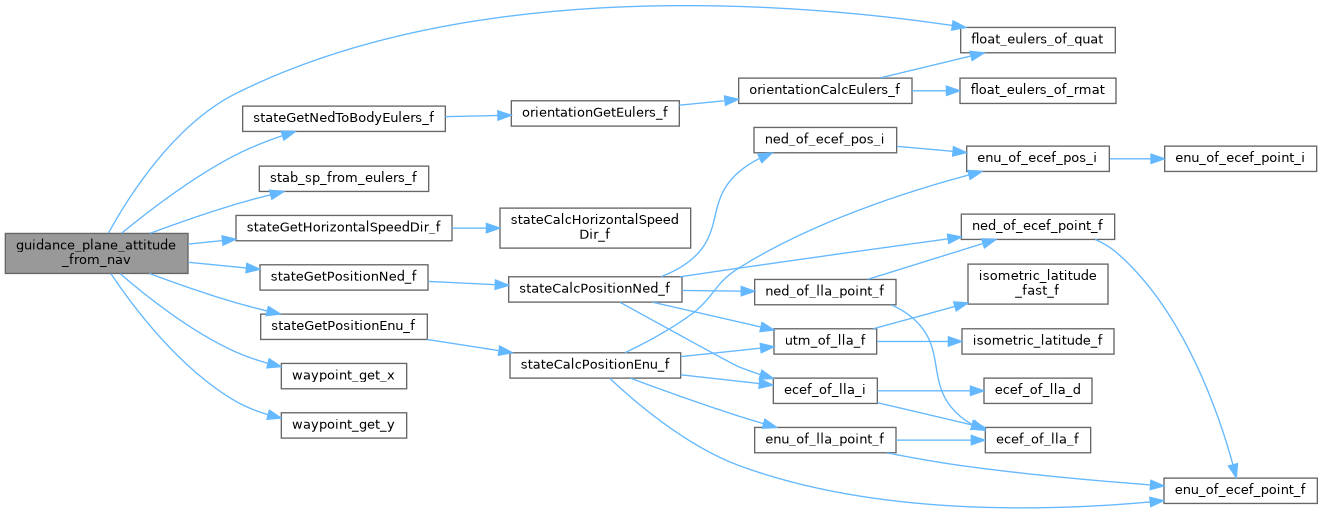
References RotorcraftNavigation::carrot, GuidancePlane::course_kd, GuidancePlane::course_kp, GuidancePlane::course_setpoint, float_eulers_of_quat(), foo, guidance_h, guidance_plane, RotorcraftNavigation::horizontal_mode, nav, NAV_HORIZONTAL_MODE_ATTITUDE, NAV_HORIZONTAL_MODE_GUIDED, NAV_HORIZONTAL_MODE_NONE, NAV_SETPOINT_MODE_ACCEL, NAV_SETPOINT_MODE_POS, NAV_SETPOINT_MODE_QUAT, NAV_SETPOINT_MODE_SPEED, FloatEulers::phi, RotorcraftNavigation::pitch, GuidancePlane::pitch_cmd, HorizontalGuidanceSetpoint::pos, POS_BFP_OF_REAL, FloatEulers::psi, RotorcraftNavigation::quat, RotorcraftNavigation::roll, GuidancePlane::roll_cmd, GuidancePlane::roll_max_setpoint, RotorcraftNavigation::setpoint_mode, HorizontalGuidance::sp, RotorcraftNavigation::speed, stab_sp_from_eulers_f(), stateGetHorizontalSpeedDir_f(), stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), stateGetPositionNed_f(), FloatEulers::theta, waypoint_get_x(), waypoint_get_y(), Int32Vect2::x, EnuCoor_f::x, Int32Vect2::y, and EnuCoor_f::y.
Referenced by control_mixing_heewing_nav_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 276 of file guidance_plane.c.
References pitch_sum_err, and throttle_sum_err.
Definition at line 90 of file guidance_plane.c.
References GuidancePlane::altitude_setpoint, GuidancePlane::climb_kp, GuidancePlane::climb_max_setpoint, GuidancePlane::climb_setpoint, GuidancePlane::climb_throttle_increment, GuidancePlane::course_kd, GuidancePlane::course_kp, GuidancePlane::course_pre_bank_correction, GuidancePlane::course_setpoint, GuidancePlane::cruise_throttle, foo, GUIDANCE_PLANCE_COURSE_PRE_BANK, guidance_plane, GUIDANCE_PLANE_CLIMB_THROTTLE_INCREMENT, GUIDANCE_PLANE_MAX_BANK, GUIDANCE_PLANE_MAX_CLIMB, GUIDANCE_PLANE_MAX_PITCH, GUIDANCE_PLANE_MIN_PITCH, GUIDANCE_PLANE_PITCH_OF_VZ, GUIDANCE_PLANE_PITCH_TRIM, GuidancePlane::p_kd, GuidancePlane::p_ki, GuidancePlane::p_kp, GuidancePlane::pitch_cmd, GuidancePlane::pitch_max_setpoint, GuidancePlane::pitch_min_setpoint, GuidancePlane::pitch_of_vz, pitch_sum_err, GuidancePlane::pitch_trim, GuidancePlane::roll_cmd, GuidancePlane::roll_max_setpoint, GuidancePlane::t_kd, GuidancePlane::t_ki, GuidancePlane::t_kp, GuidancePlane::throttle_cmd, and throttle_sum_err.
|
extern |
run vertical control loop for position and speed control
Definition at line 253 of file guidance_plane.c.
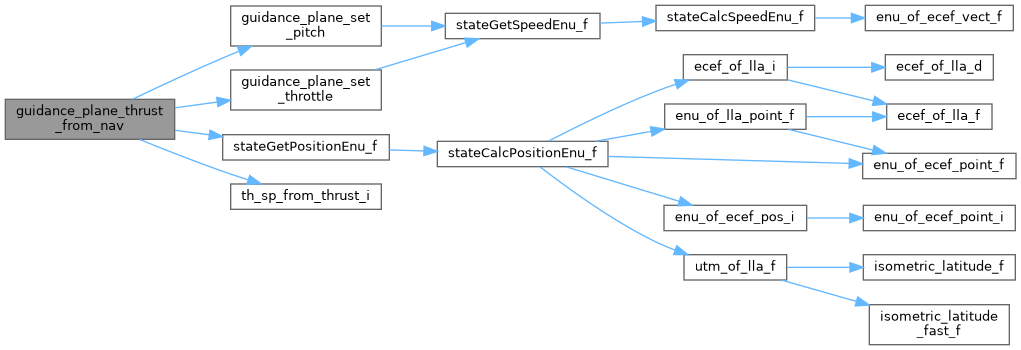
References GuidancePlane::altitude_setpoint, RotorcraftNavigation::climb, GuidancePlane::climb_kp, GuidancePlane::climb_max_setpoint, GuidancePlane::climb_setpoint, foo, guidance_plane, guidance_plane_set_pitch(), guidance_plane_set_throttle(), nav, RotorcraftNavigation::nav_altitude, NAV_VERTICAL_MODE_ALT, NAV_VERTICAL_MODE_CLIMB, NAV_VERTICAL_MODE_MANUAL, stateGetPositionEnu_f(), th_sp_from_thrust_i(), RotorcraftNavigation::throttle, GuidancePlane::throttle_cmd, THRUST_AXIS_X, RotorcraftNavigation::vertical_mode, and EnuCoor_f::z.
Referenced by control_mixing_heewing_nav_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Guidance PID structyre.
Definition at line 73 of file guidance_plane.c.
Referenced by control_mixing_heewing_nav_run(), guidance_plane_attitude_from_nav(), guidance_plane_init(), guidance_plane_set_pitch(), guidance_plane_set_throttle(), and guidance_plane_thrust_from_nav().