|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
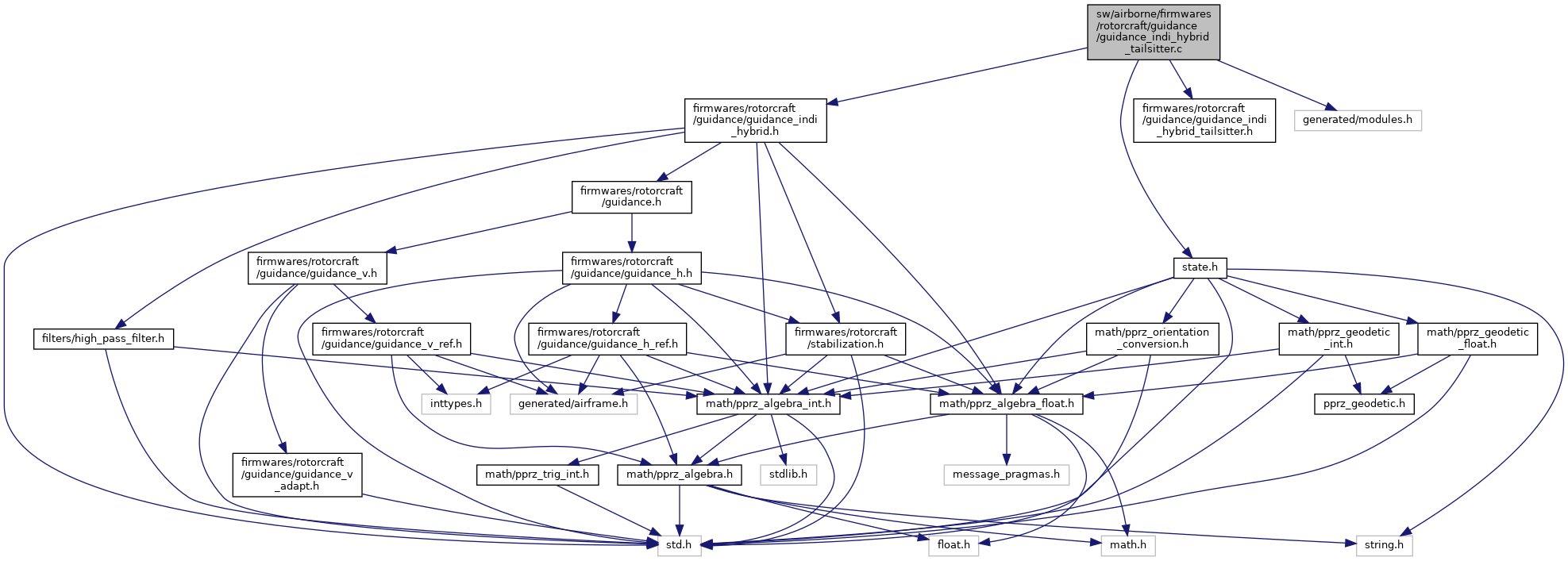
#include "firmwares/rotorcraft/guidance/guidance_indi_hybrid.h"#include "firmwares/rotorcraft/guidance/guidance_indi_hybrid_tailsitter.h"#include "state.h"#include "generated/modules.h" Include dependency graph for guidance_indi_hybrid_tailsitter.c:
Include dependency graph for guidance_indi_hybrid_tailsitter.c:Go to the source code of this file.
Macros | |
| #define | GUIDANCE_INDI_PITCH_EFF_SCALING 1.0 |
Functions | |
| void | guidance_indi_calcg_wing (float Gmat[GUIDANCE_INDI_HYBRID_V][GUIDANCE_INDI_HYBRID_U], struct FloatVect3 a_diff, float v_gih[GUIDANCE_INDI_HYBRID_V]) |
| Calculate the matrix of partial derivatives of the roll, pitch and thrust w.r.t. | |
| #define GUIDANCE_INDI_PITCH_EFF_SCALING 1.0 |
| void guidance_indi_calcg_wing | ( | float | Gmat[GUIDANCE_INDI_HYBRID_V][GUIDANCE_INDI_HYBRID_U], |
| struct FloatVect3 | a_diff, | ||
| float | v_gih[GUIDANCE_INDI_HYBRID_V] | ||
| ) |
Calculate the matrix of partial derivatives of the roll, pitch and thrust w.r.t.
Perform WLS.
the NED accelerations, taking into account the lift of a wing that is horizontal at -90 degrees pitch
| Gmat | Dynamics matrix |
| a_diff | acceleration errors in earth frame |
| body_v | 3D vector to write the control objective v |
Definition at line 41 of file guidance_indi_hybrid_tailsitter.c.
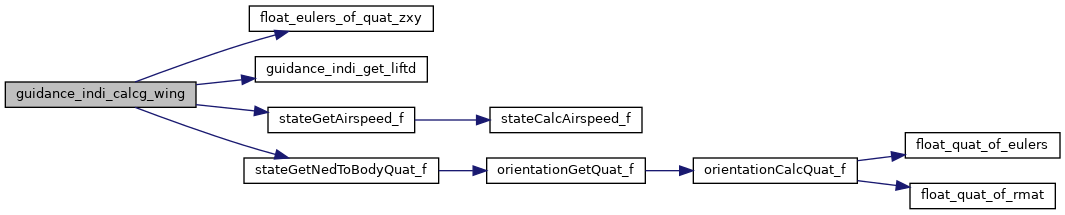
References accel_bodyz_filt, float_eulers_of_quat_zxy(), foo, Gmat, guidance_indi_get_liftd(), GUIDANCE_INDI_PITCH_EFF_SCALING, SecondOrderLowPass::o, QuatSecondOrderLowPass::quat, quat_filt, stateGetAirspeed_f(), and v_gih.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function: