|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
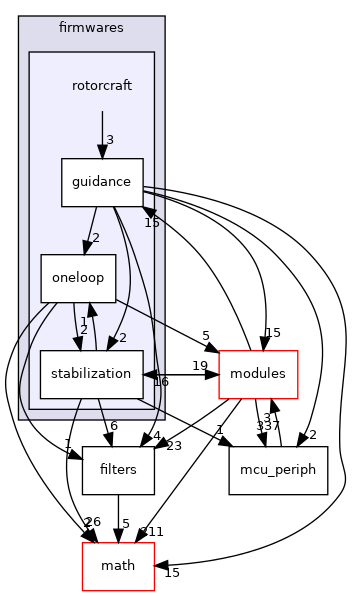
 Directory dependency graph for rotorcraft:
Directory dependency graph for rotorcraft:Directories | |
| guidance | |
| oneloop | |
| stabilization | |
Files | |
| autopilot_arming.h | |
| Arming procedure for rotorcraft Several options can be selected: | |
| autopilot_arming_common.h | |
| Arming procedure for rotorcraft, common definitions. | |
| autopilot_arming_switch.h | |
| Arm the motors using a switch. | |
| autopilot_arming_throttle.h | |
| Automatically arm the motors when applying throttle. | |
| autopilot_arming_yaw.h | |
| Arm the motors by with max yaw stick. | |
| autopilot_firmware.c | |
| autopilot_firmware.h | |
| Rotorcraft specific autopilot interface and initialization. | |
| autopilot_generated.c | |
| Generated autopilot implementation. | |
| autopilot_generated.h | |
| Autopilot generated implementation Calls the code generated from autopilot XML file. | |
| autopilot_guided.c | |
| Autopilot guided mode interface. | |
| autopilot_guided.h | |
| Autopilot guided mode interface. | |
| autopilot_rc_helpers.h | |
| Some helper functions to check RC sticks. | |
| autopilot_static.c | |
| Static autopilot implementation. | |
| autopilot_static.h | |
| Autopilot static implementation. | |
| autopilot_utils.c | |
| Utility functions and includes for autopilots. | |
| autopilot_utils.h | |
| Utility functions and includes for autopilots. | |
| guidance.h | |
| navigation.c | |
| Rotorcraft navigation functions. | |
| navigation.h | |
| Rotorcraft navigation functions. | |
| rotorcraft_telemetry.c | |
| stabilization.c | |
| General stabilization interface for rotorcrafts. | |
| stabilization.h | |
| General stabilization interface for rotorcrafts. | |