|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
A guidance mode based on Incremental Nonlinear Dynamic Inversion Come to ICRA2016 to learn more! More...
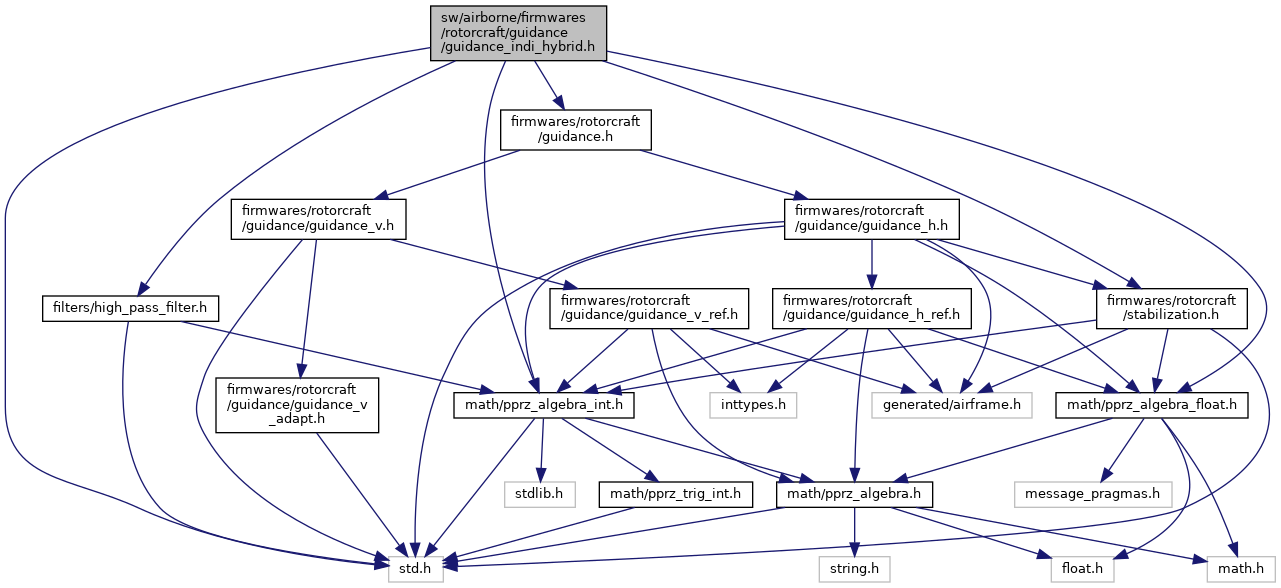
#include "std.h"#include "math/pprz_algebra_int.h"#include "math/pprz_algebra_float.h"#include "filters/low_pass_filter.h"#include "filters/quaternion_filter.h"#include "firmwares/rotorcraft/guidance.h"#include "firmwares/rotorcraft/stabilization.h" Include dependency graph for guidance_indi_hybrid.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for guidance_indi_hybrid.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | guidance_indi_hybrid_params |
Functions | |
| void | guidance_indi_init (void) |
| Init function. | |
| void | guidance_indi_enter (void) |
| Call upon entering indi guidance. | |
| float | guidance_indi_get_liftd (float pitch, float theta) |
| void | guidance_indi_calcg_wing (float Gmat[GUIDANCE_INDI_HYBRID_V][GUIDANCE_INDI_HYBRID_U], struct FloatVect3 a_diff, float v_body[GUIDANCE_INDI_HYBRID_V]) |
| Perform WLS. | |
| struct StabilizationSetpoint | guidance_indi_run (struct FloatVect3 *accep_sp, float heading_sp) |
| struct StabilizationSetpoint | guidance_indi_run_mode (bool in_flight, struct HorizontalGuidance *gh, struct VerticalGuidance *gv, enum GuidanceIndiHybrid_HMode h_mode, enum GuidanceIndiHybrid_VMode v_mode) |
| void | guidance_set_min_max_airspeed (float min_airspeed, float max_airspeed) |
| void | guidance_set_max_bank_angle (float max_bank) |
| void | guidance_set_max_climb_speed (float max_climb_speed_quad, float max_climb_speed_fwd) |
| void | guidance_set_max_descend_speed (float max_descend_speed_quad, float max_descend_speed_fwd) |
A guidance mode based on Incremental Nonlinear Dynamic Inversion Come to ICRA2016 to learn more!
Definition in file guidance_indi_hybrid.h.
| struct guidance_indi_hybrid_params |
Definition at line 79 of file guidance_indi_hybrid.h.
| Data Fields | ||
|---|---|---|
| float | climb_vspeed_fwd | |
| float | climb_vspeed_quad | |
| float | descend_vspeed_fwd | |
| float | descend_vspeed_quad | |
| float | heading_bank_gain | |
| float | liftd_asq | |
| float | liftd_p50 | |
| float | liftd_p80 | |
| float | max_airspeed | |
| float | min_airspeed | |
| float | pos_gain | |
| float | pos_gainz | |
| float | speed_gain | |
| float | speed_gainz | |
| float | stall_protect_gain | |
| Enumerator | |
|---|---|
| GUIDANCE_INDI_HYBRID_H_POS | |
| GUIDANCE_INDI_HYBRID_H_SPEED | |
| GUIDANCE_INDI_HYBRID_H_ACCEL | |
Definition at line 60 of file guidance_indi_hybrid.h.
| Enumerator | |
|---|---|
| GUIDANCE_INDI_HYBRID_V_POS | |
| GUIDANCE_INDI_HYBRID_V_SPEED | |
| GUIDANCE_INDI_HYBRID_V_ACCEL | |
Definition at line 66 of file guidance_indi_hybrid.h.
|
extern |
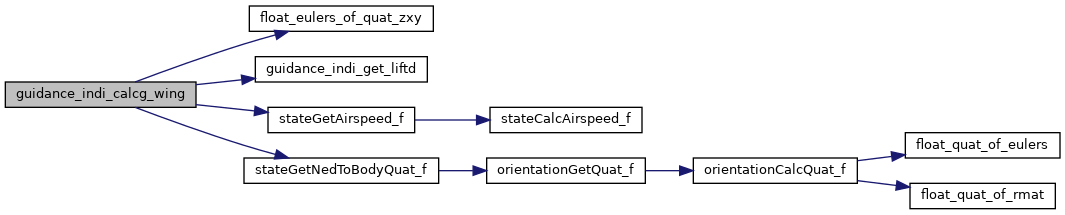
Perform WLS.
| Gmat | Dynamics matrix |
| a_diff | acceleration errors in earth frame |
| body_v | 3D vector to write the control objective v |
Perform WLS.
the NED accelerations, taking into account the lift of a wing that is horizontal at -90 degrees pitch
| Gmat | Dynamics matrix |
| a_diff | acceleration errors in earth frame |
| body_v | 3D vector to write the control objective v |
Definition at line 86 of file guidance_indi_hybrid_quadplane.c.
References accel_bodyz_filt, float_eulers_of_quat_zxy(), foo, Gmat, guidance_indi_get_liftd(), GUIDANCE_INDI_PITCH_EFF_SCALING, SecondOrderLowPass::o, QuatSecondOrderLowPass::quat, quat_filt, stateGetAirspeed_f(), and v_gih.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:Call upon entering indi guidance.
Definition at line 214 of file guidance_indi.c.
References accely_filt, Stabilization::cmd, eulers_zxy, filt_accel_ned, filter_cutoff, float_eulers_of_quat_zxy(), foo, guidance_indi_airspeed_filt, guidance_indi_airspeed_filt_cutoff, guidance_indi_hybrid_heading_sp, RotorcraftNavigation::heading, init_butterworth_2_low_pass(), init_quat_butterworth_low_pass(), nav, FloatEulers::psi, quat_filt, stabilization, stateGetNedToBodyEulers_f(), stateGetNedToBodyQuat_f(), thrust_act, thrust_dyn, thrust_filt, and thrust_in.
Here is the call graph for this function:Definition at line 450 of file eff_scheduling_rotwing.c.
References eff_scheduling_rotwing_lift_d.
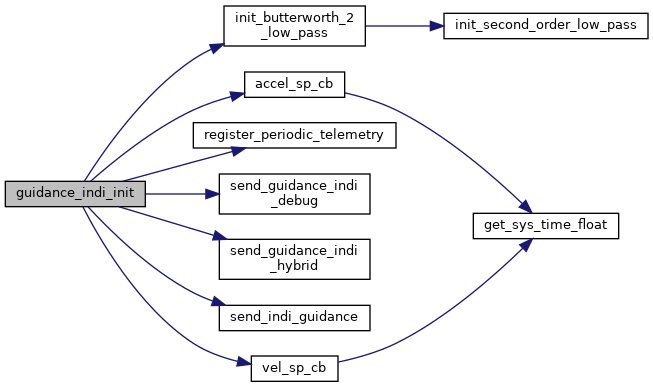
Init function.
Definition at line 199 of file guidance_indi.c.
References accel_sp_cb(), accel_sp_ev, accely_filt, DefaultPeriodic, filt_accel_ned, filter_cutoff, FLOAT_EULERS_ZERO, float_quat_identity(), foo, Ga, guidance_euler_cmd, GUIDANCE_INDI_ACCEL_SP_ID, guidance_indi_airspeed_filt, guidance_indi_airspeed_filt_cutoff, GUIDANCE_INDI_VEL_SP_ID, init_butterworth_2_low_pass(), init_quat_butterworth_low_pass(), quat_filt, register_periodic_telemetry(), send_eff_mat_guid_indi_hybrid(), send_guidance_indi_hybrid(), send_indi_guidance(), thrust_dyn, thrust_filt, thrust_sp, THRUST_SP_SET_ZERO, vel_sp_cb(), and vel_sp_ev.
Here is the call graph for this function:
|
extern |
| accel_sp | accel setpoint in NED frame [m/s^2] |
| heading_sp | the desired heading [rad] |
main indi guidance function
Definition at line 246 of file guidance_indi.c.
References accely_filt, control_increment, du_gih, euler_cmd, eulers_zxy, filt_accel_ned, FLOAT_ANGLE_NORMALIZE, float_eulers_of_quat_yxz(), float_eulers_of_quat_zxy(), float_mat3_mult(), float_mat_inv_3d(), float_quat_normalize(), float_quat_of_eulers_yxz(), float_quat_of_eulers_zxy(), foo, g1g2, Ga, Ga_inv, gih_coordinated_turn_max_airspeed, gih_coordinated_turn_min_airspeed, Gmat, guidance_euler_cmd, guidance_indi_calcG(), guidance_indi_calcg_wing(), guidance_indi_hybrid_heading_sp, guidance_indi_hybrid_set_wls_settings(), guidance_indi_max_bank, GUIDANCE_INDI_MAX_PITCH, GUIDANCE_INDI_MAX_PUSHER_INCREMENT, guidance_indi_min_pitch, GUIDANCE_INDI_NU, GUIDANCE_INDI_NV, guidance_indi_propagate_filters(), guidance_indi_propagate_filters(), guidance_indi_set_wls_settings(), guidance_indi_specific_force_gain, heading, MAT33_INV, MAT33_VECT3_MUL, MAX_PPRZ, SecondOrderLowPass::o, FloatRates::p, FloatEulers::phi, FloatEulers::psi, QuatSecondOrderLowPass::quat, quat_filt, radio_control, RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, RMAT_ELMT, sp_accel, stab_sp_from_quat_f(), stab_sp_from_quat_ff_rates_f(), stabilization, stabilization_attitude_get_heading_f(), stateGetAirspeed_f(), stateGetNedToBodyEulers_f(), stateGetNedToBodyQuat_f(), take_heading_control, th_sp_from_incr_vect_f(), th_sp_from_thrust_i(), FloatEulers::theta, THRUST_AXIS_Z, thrust_filt, thrust_in, thrust_sp, thrust_vect, Stabilization::transition_ratio, v_gih, RadioControl::values, VECT3_DIFF, wls_alloc(), FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by guidance_indi_run_mode(), and guidance_indi_run_mode().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 776 of file guidance_indi_hybrid.c.
References ACCEL_FLOAT_OF_BFP, bound_vz_sp(), compute_accel_from_speed_sp(), foo, get_sys_time_float(), gi_speed_sp, gih_params, GUIDANCE_INDI_HYBRID_H_POS, GUIDANCE_INDI_HYBRID_H_SPEED, GUIDANCE_INDI_HYBRID_V_ACCEL, GUIDANCE_INDI_HYBRID_V_POS, GUIDANCE_INDI_HYBRID_V_SPEED, guidance_indi_run(), indi_vel_sp, POS_FLOAT_OF_BFP, guidance_indi_hybrid_params::pos_gain, guidance_indi_hybrid_params::pos_gainz, SPEED_FLOAT_OF_BFP, guidance_indi_hybrid_params::speed_gain, guidance_indi_hybrid_params::speed_gainz, stateGetPositionNed_f(), stateGetSpeedNed_f(), time_of_vel_sp, FloatVect3::x, NedCoor_f::x, FloatVect3::y, NedCoor_f::y, FloatVect3::z, and NedCoor_f::z.
Here is the call graph for this function:Definition at line 419 of file guidance_indi_hybrid.c.
References foo, and guidance_indi_max_bank.
Referenced by rotwing_state_periodic().
Here is the caller graph for this function:Definition at line 423 of file guidance_indi_hybrid.c.
References guidance_indi_hybrid_params::climb_vspeed_fwd, guidance_indi_hybrid_params::climb_vspeed_quad, foo, and gih_params.
Referenced by rotwing_state_periodic().
Here is the caller graph for this function:
|
extern |
Definition at line 428 of file guidance_indi_hybrid.c.
References guidance_indi_hybrid_params::descend_vspeed_fwd, guidance_indi_hybrid_params::descend_vspeed_quad, foo, and gih_params.
Referenced by rotwing_state_periodic().
Here is the caller graph for this function:Definition at line 414 of file guidance_indi_hybrid.c.
|
extern |
Definition at line 230 of file guidance_indi_hybrid.c.
|
extern |
forward flight for hybrid nav
Definition at line 161 of file guidance_indi_hybrid.c.
|
extern |
Definition at line 289 of file guidance_indi_hybrid.c.
Referenced by compute_accel_from_speed_sp(), guidance_indi_run_mode(), and send_guidance_indi_hybrid().
|
extern |
Definition at line 244 of file guidance_indi_hybrid.c.
|
extern |
Definition at line 111 of file guidance_indi_hybrid.c.
|
extern |
Definition at line 163 of file guidance_indi_hybrid.c.
Referenced by compute_accel_from_speed_sp().
|
extern |
Definition at line 156 of file guidance_indi.c.
Referenced by guidance_indi_hybrid_set_wls_settings(), guidance_indi_run(), guidance_indi_set_wls_settings(), and guidance_set_max_bank_angle().
|
extern |
Definition at line 220 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_run().
|
extern |
Definition at line 132 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_hybrid_set_wls_settings().
|
extern |
|
extern |
Referenced by guidance_indi_hybrid_set_wls_settings().
|
extern |
Definition at line 109 of file guidance_indi.c.
Referenced by guidance_indi_calcg_wing(), guidance_indi_calcg_wing(), guidance_indi_enter(), guidance_indi_init(), guidance_indi_propagate_filters(), guidance_indi_propagate_filters(), and guidance_indi_run().
|
extern |
Definition at line 159 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_run().