|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Guidance controller with PID for rotorcrafts. More...
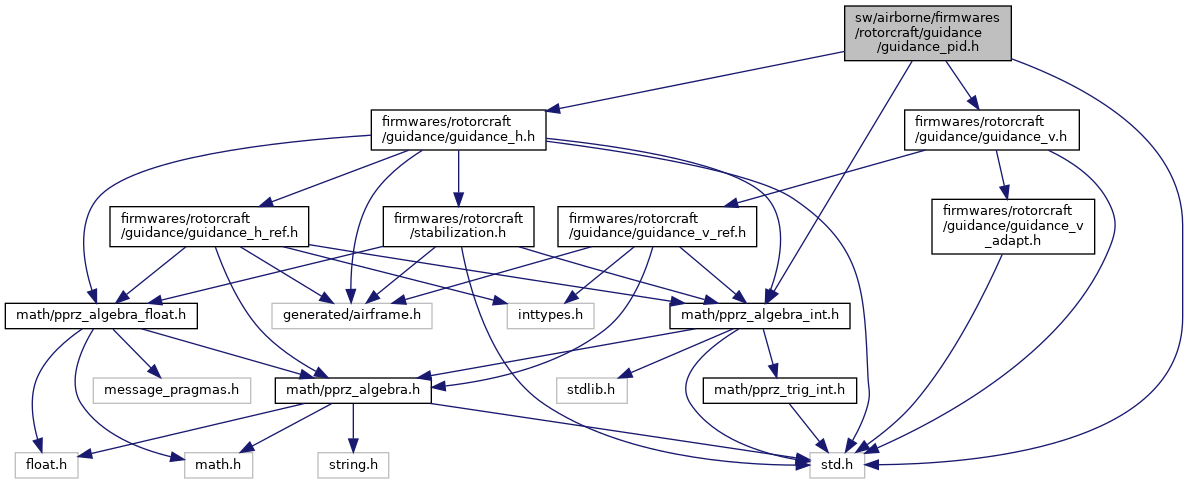
#include "std.h"#include "math/pprz_algebra_int.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "firmwares/rotorcraft/guidance/guidance_v.h" Include dependency graph for guidance_pid.h: This graph shows which files directly or indirectly include this file:
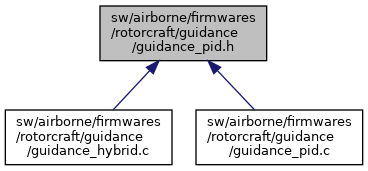
Include dependency graph for guidance_pid.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | GuidancePID |
Functions | |
| void | guidance_pid_init (void) |
| void | guidance_pid_h_enter (void) |
| void | guidance_pid_v_enter (void) |
| struct StabilizationSetpoint | guidance_pid_h_run_pos (bool in_flight, struct HorizontalGuidance *gh) |
| struct StabilizationSetpoint | guidance_pid_h_run_speed (bool in_flight, struct HorizontalGuidance *gh) |
| struct StabilizationSetpoint | guidance_pid_h_run_accel (bool in_flight, struct HorizontalGuidance *gh) |
| struct ThrustSetpoint | guidance_pid_v_run_pos (bool in_flight, struct VerticalGuidance *gv) |
| struct ThrustSetpoint | guidance_pid_v_run_speed (bool in_flight, struct VerticalGuidance *gv) |
| struct ThrustSetpoint | guidance_pid_v_run_accel (bool in_flight, struct VerticalGuidance *gv) |
| void | guidance_pid_set_h_igain (uint32_t igain) |
| settings handler | |
| void | guidance_pid_set_v_igain (uint32_t igain) |
| const struct Int32Vect2 * | guidance_pid_get_h_pos_err (void) |
| Gets the position error. | |
Variables | |
| struct GuidancePID | guidance_pid |
| Guidance PID structyre. | |
Guidance controller with PID for rotorcrafts.
Definition in file guidance_pid.h.
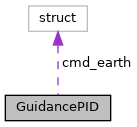
| struct GuidancePID |
|
extern |
Gets the position error.
| none. |
Definition at line 417 of file guidance_pid.c.
References guidance_pid_pos_err.
Definition at line 389 of file guidance_pid.c.
References RotorcraftNavigation::heading, nav, FloatEulers::psi, and stateGetNedToBodyEulers_f().
Here is the call graph for this function:
|
extern |
|
extern |
Definition at line 278 of file guidance_pid.c.
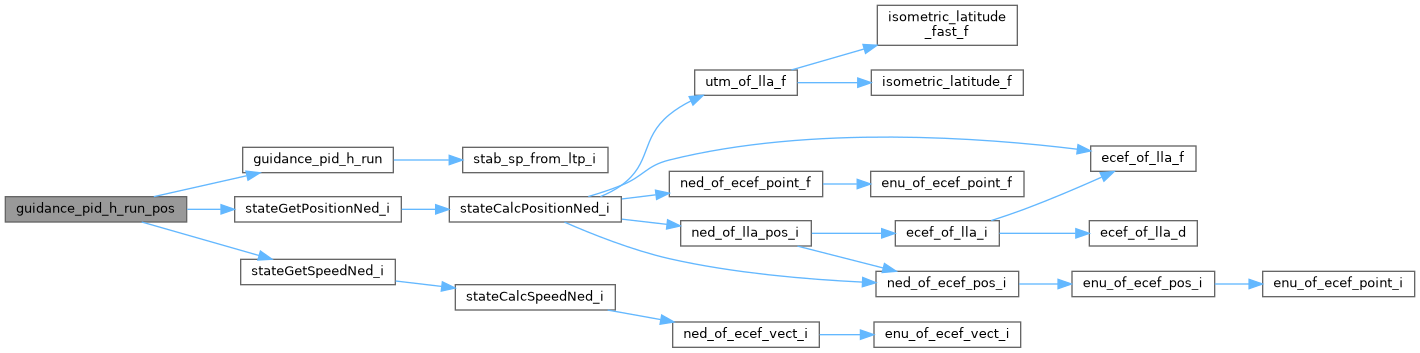
References foo, guidance_pid_h_run(), guidance_pid_pos_err, guidance_pid_speed_err, MAX_POS_ERR, MAX_SPEED_ERR, stateGetPositionNed_i(), stateGetSpeedNed_i(), VECT2_DIFF, and VECT2_STRIM.
Here is the call graph for this function:
|
extern |
Definition at line 294 of file guidance_pid.c.
References foo, guidance_pid_h_run(), guidance_pid_pos_err, guidance_pid_speed_err, INT_VECT2_ZERO, MAX_SPEED_ERR, stateGetSpeedNed_i(), VECT2_DIFF, and VECT2_STRIM.
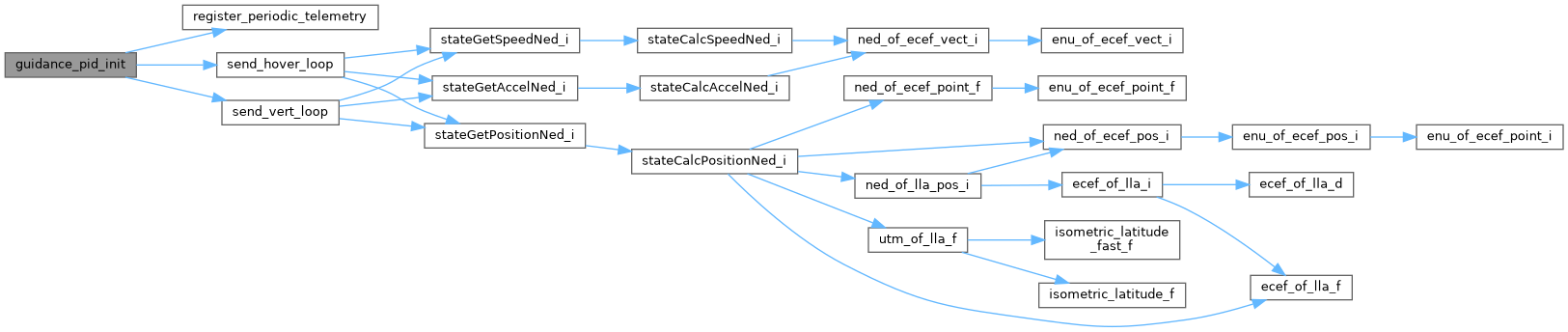
Here is the call graph for this function:Definition at line 184 of file guidance_pid.c.
References GuidancePID::adapt_throttle_enabled, GuidancePID::approx_force_by_thrust, GuidancePID::cmd_earth, GuidancePID::cmd_thrust, DefaultPeriodic, foo, GUIDANCE_H_AGAIN, GUIDANCE_H_APPROX_FORCE_BY_THRUST, GUIDANCE_H_VGAIN, guidance_pid, guidance_pid_pos_err, guidance_pid_speed_err, guidance_pid_trim_att_integrator, guidance_pid_v_fb_cmd, guidance_pid_v_ff_cmd, guidance_pid_z_sum_err, GUIDANCE_V_ADAPT_THROTTLE_ENABLED, INT_VECT2_ZERO, GuidancePID::ka, GuidancePID::kd, GuidancePID::ki, GuidancePID::kp, GuidancePID::kv, register_periodic_telemetry(), send_hover_loop(), send_vert_loop(), GuidancePID::v_kd, GuidancePID::v_ki, and GuidancePID::v_kp.
Here is the call graph for this function:settings handler
Definition at line 404 of file guidance_pid.c.
References guidance_pid, guidance_pid_trim_att_integrator, INT_VECT2_ZERO, and GuidancePID::ki.
Definition at line 410 of file guidance_pid.c.
References guidance_pid, guidance_pid_z_sum_err, and GuidancePID::v_ki.
Definition at line 395 of file guidance_pid.c.
References guidance_pid_z_sum_err.
|
extern |
|
extern |
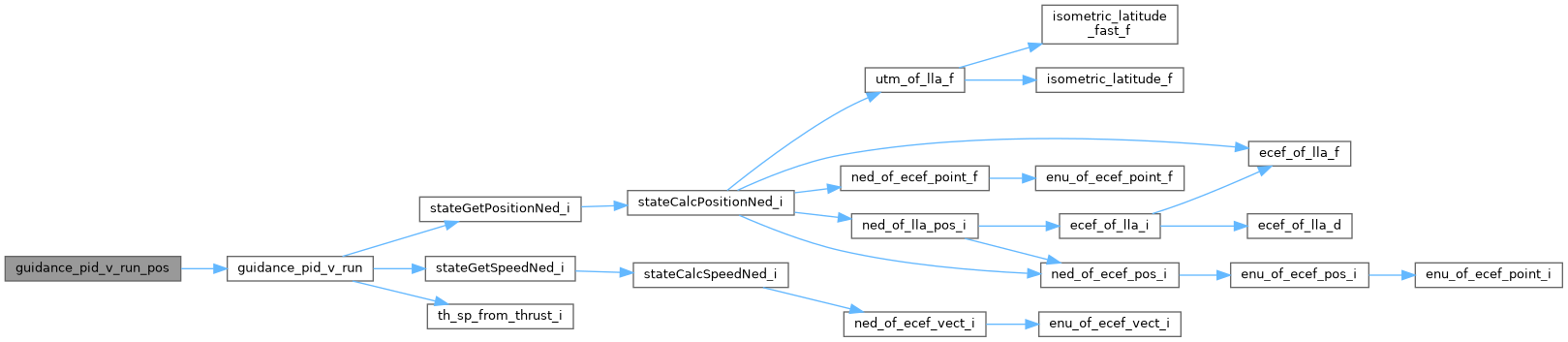
Definition at line 371 of file guidance_pid.c.
References foo, and guidance_pid_v_run().
Referenced by guidance_hybrid_v_run_pos().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
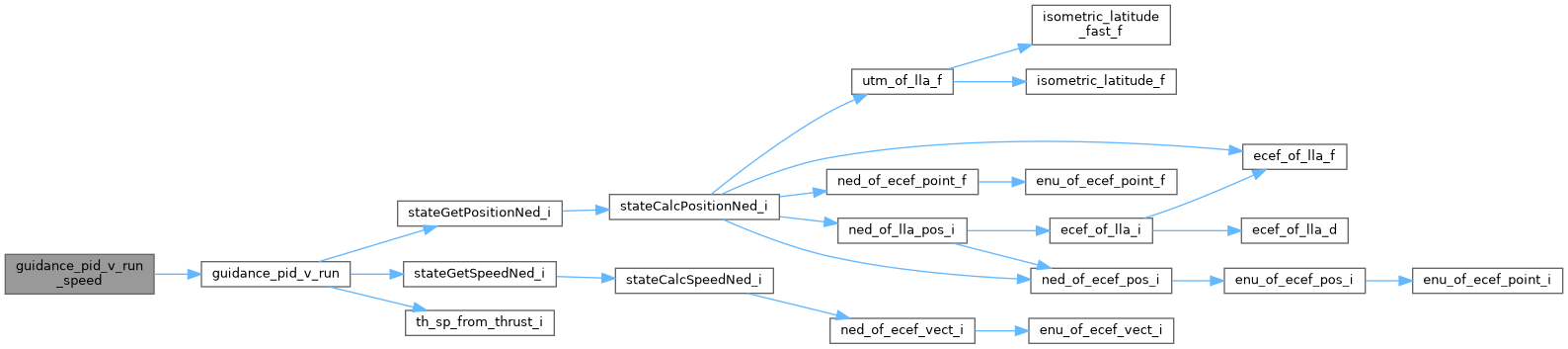
Definition at line 376 of file guidance_pid.c.
References foo, and guidance_pid_v_run().
Referenced by guidance_hybrid_v_run_speed().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Guidance PID structyre.
Definition at line 124 of file guidance_pid.c.
Referenced by guidance_hybrid_vertical(), guidance_pid_h_run(), guidance_pid_init(), guidance_pid_set_h_igain(), guidance_pid_set_v_igain(), guidance_pid_v_run(), send_hover_loop(), and send_vert_loop().