|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h"#include "mcu.h"#include "mcu_periph/sys_time.h"#include "led.h"#include "mcu_periph/uart.h"#include "pprzlink/messages.h"#include "modules/datalink/downlink.h"#include "generated/settings.h" Include dependency graph for main_demo5.c:
Include dependency graph for main_demo5.c:Go to the source code of this file.
Macros | |
| #define | MSG_SIZE 256 |
| #define | IdOfMsg(x) (x[1]) |
Functions | |
| static void | main_init (void) |
| static void | main_periodic_task (void) |
| static void | main_event_task (void) |
| static void | main_dl_parse_msg (void) |
| int | main (void) |
Variables | |
| uint16_t | foo |
| bool | dl_msg_available |
| Flag provided to control calls to dl_parse_msg. | |
| uint8_t | dl_buffer [MSG_SIZE] |
| #define IdOfMsg | ( | x | ) | (x[1]) |
Definition at line 67 of file main_demo5.c.
| #define MSG_SIZE 256 |
Definition at line 62 of file main_demo5.c.
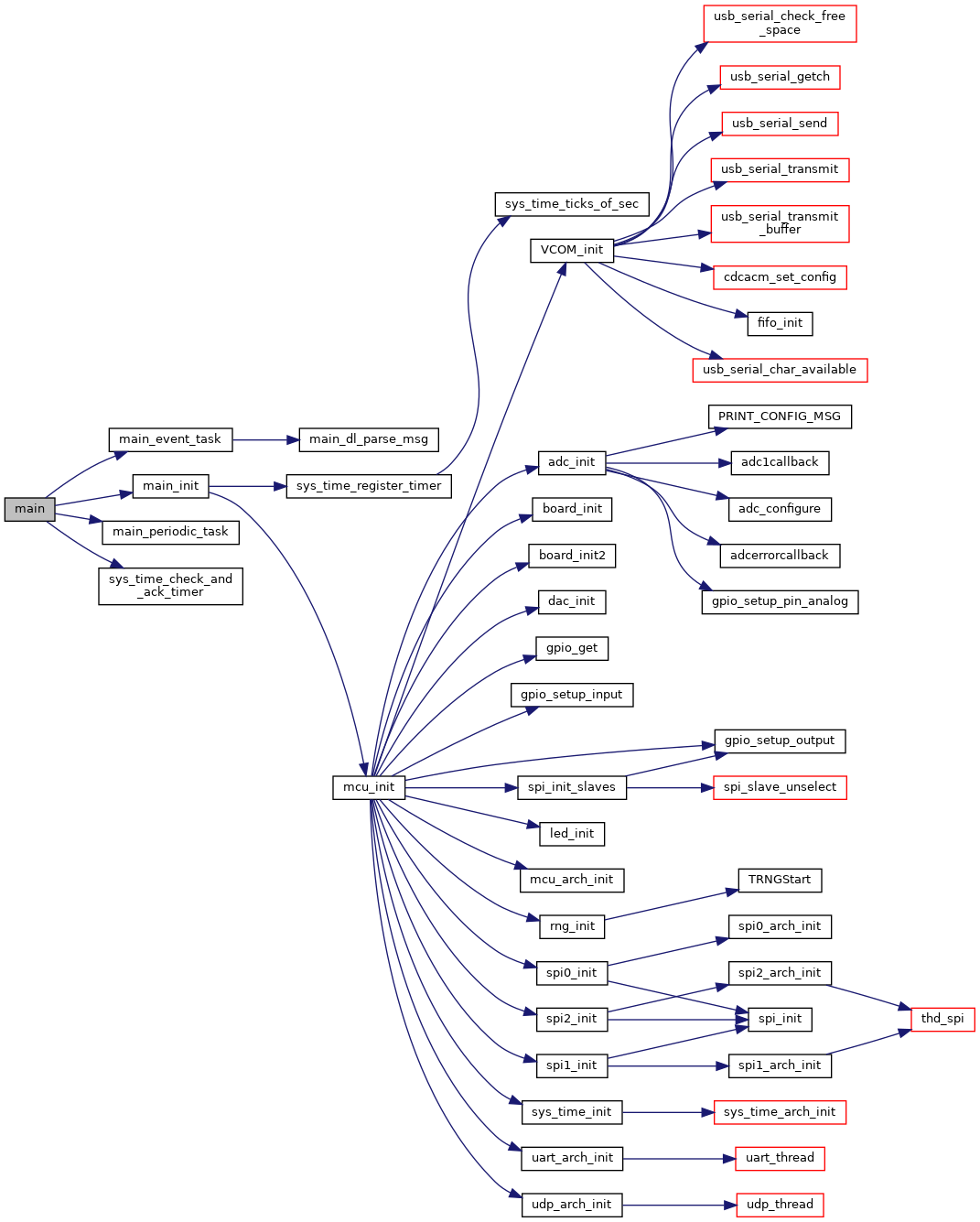
Definition at line 16 of file main_demo5.c.
References main_event_task(), main_init(), main_periodic_task(), and sys_time_check_and_ack_timer().
Here is the call graph for this function:Definition at line 69 of file main_demo5.c.
References dl_buffer, foo, and IdOfMsg.
Referenced by main_event_task().
Here is the caller graph for this function:Definition at line 42 of file main_demo5.c.
References dl_msg_available, foo, LED_TOGGLE, and main_dl_parse_msg().
Referenced by main().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 28 of file main_demo5.c.
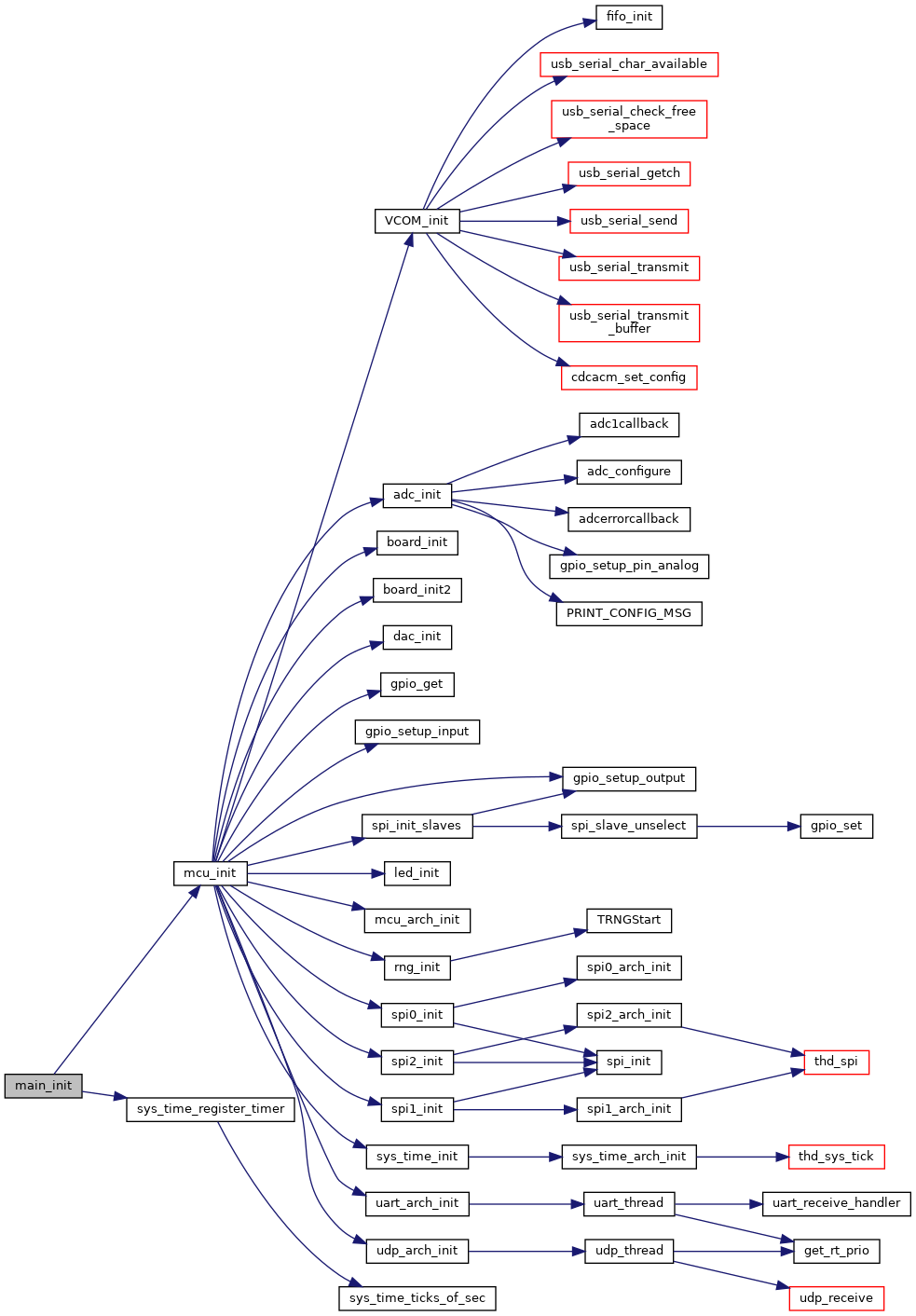
References foo, mcu_init(), and sys_time_register_timer().
Referenced by main().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 35 of file main_demo5.c.
References foo, and sys_time::nb_sec.
Referenced by main().
Here is the caller graph for this function:Definition at line 63 of file main_demo5.c.
Referenced by copilot_parse_move_wp_dl(), copilot_parse_payload_command_dl(), gec_dl_event(), LWC_callback(), main_dl_parse_msg(), parse_ctc_target_CleanTable(), parse_ctc_target_RegTable(), parseTcasRA(), pprz_dl_event(), superbitrf_dl_event(), w5100_event(), and xbee_dl_event().
| bool dl_msg_available |
Flag provided to control calls to dl_parse_msg.
NOT used in this module
Definition at line 60 of file main_demo5.c.
Referenced by gec_dl_event(), main_event_task(), pprz_dl_event(), superbitrf_dl_event(), superbitrf_receive_packet_cb(), w5100_event(), and xbee_dl_event().
| uint16_t foo |
Definition at line 58 of file main_demo5.c.
Referenced by __early_init(), simple_quad_sim.BulletFDM::__init__(), mesonh.mesonh_atmosphere.MesoNHAtmosphere::__init__(), ArrowDial.ArrowDial::__init__(), gaia.Gaia::__init__(), AngleSelector.AngleSelector::__init__(), betterHSlider.BetterHSlider::__init__(), betterVSlider.BetterVSlider::__init__(), gaia.GaiaWindow::__init__(), gaia.GaiaWindow::__send_status(), betterAbstractSlider.BetterAbstractSlider::__slider_range_changed(), betterAbstractSlider.BetterAbstractSlider::__spinbox_to_slider_value(), __wrap_gpio_clear(), __wrap_gpio_get(), __wrap_gpio_set(), __wrap_gpio_setup_input(), __wrap_gpio_setup_output(), __wrap_gpio_toggle(), mesonh.mesonh_atmosphere.MesoNHAtmosphere::_apply_bounds(), _chvsnprintf(), _close_r(), _dma_isr_error_code(), _dma_isr_full_code(), _dma_isr_half_code(), _exit(), _fstat_r(), _input_capture_isr_invoke_capture_cb(), _input_capture_isr_invoke_overflow_cb(), _isatty_r(), _lseek_r(), _osd_sprintf(), _pdec_init(), _pdec_periodic_report(), _read_r(), _sbrk_r(), mesonh.mesonh_atmosphere.MesoNHAtmosphere::_slicyfy(), _vl53l5cx_poll_for_answer(), _vl53l5cx_poll_for_mcu_boot(), _vl53l5cx_send_offset_data(), _vl53l5cx_send_xtalk_data(), _write_r(), ac_char_average(), ac_char_update(), acc_body_bound(), accel_cb(), accel_cb(), accel_cb(), accel_cb(), accel_cb(), accel_cb(), accel_cb(), accel_cb(), accel_cb(), accel_cb(), accel_cb(), accel_cb(), accel_cb(), accel_int_cb(), accel_sp_cb(), acInfoCalcPositionEnu_f(), acInfoCalcPositionEnu_i(), acInfoCalcPositionLla_f(), acInfoCalcPositionLla_i(), acInfoCalcPositionUtm_f(), acInfoCalcPositionUtm_i(), acInfoCalcVelocityEnu_f(), acInfoCalcVelocityEnu_i(), acInfoGetPositionEnu_f(), acInfoGetPositionEnu_i(), acInfoGetPositionLla_f(), acInfoGetPositionLla_i(), acInfoGetPositionUtm_f(), acInfoGetPositionUtm_i(), acInfoGetVelocityEnu_f(), acInfoGetVelocityEnu_i(), acInfoSetPositionEnu_f(), acInfoSetPositionEnu_i(), acInfoSetVelocityEnu_f(), acInfoSetVelocityEnu_i(), act_fast(), act_feedback_cb(), actuators_ardrone_close(), actuators_ardrone_cmd(), actuators_ardrone_commit(), actuators_ardrone_init(), actuators_ardrone_led_run(), actuators_ardrone_motor_status(), actuators_ardrone_reset_flipflop(), actuators_ardrone_set_leds(), actuators_ardrone_set_pwm(), actuators_asctec_v2_commit(), actuators_bebop_commit(), actuators_bebop_init(), actuators_disco_commit(), actuators_dshot_arch_commit(), actuators_dshot_arch_init(), actuators_esc32_arm(), actuators_esc32_beep(), actuators_esc32_can_rx_cb(), actuators_esc32_commit(), actuators_esc32_dir(), actuators_esc32_disarm(), actuators_esc32_duty(), actuators_esc32_grant_idx(), actuators_esc32_init(), actuators_esc32_play_melody(), actuators_esc32_send(), actuators_esc32_start(), actuators_faulhaber_periodic(), actuators_faulhaber_set(), actuators_hitl_init(), actuators_hitl_periodic(), actuators_md25_commit(), actuators_md25_periodic(), actuators_ostrich_init(), actuators_ostrich_periodic(), actuators_pwm_arch_commit(), actuators_pwm_arch_init(), actuators_sbus_commit(), actuators_sbus_init(), actuators_spektrum_commit(), actuators_spektrum_init(), actuators_sts3032_init(), actuators_sts3032_lock_eprom(), actuators_sts3032_periodic(), actuators_sts3032_set_id(), actuators_sts3032_set_response_level(), actuators_t4_abi_in(), actuators_t4_commit(), actuators_t4_downlink(), actuators_t4_in_callback(), actuators_t4_uart_event(), actuators_t4_uart_init(), actuators_t4_uart_parse_msg_in(), actuators_t4_uplink(), actuators_uavcan_actuator_status_cb(), actuators_uavcan_cmd_commit(), actuators_uavcan_commit(), actuators_uavcan_device_temperature_cb(), actuators_uavcan_esc_status_cb(), actuators_uavcan_init(), actuators_uavcan_next_telem(), actuators_uavcan_send_esc(), adaptive_notch_filter_init(), adaptive_notch_filter_update(), adc1callback(), adc_buf_channel(), adc_configure(), adc_dev_init(), adc_enable(), adc_generic_init(), adc_init(), adc_msg_send(), adc_read(), adcerrorcallback(), add_can_callback(), add_slot(), add_values_to_buffer(), add_video_device(), ads1114_init(), ads1220_configure(), ads1220_event(), ads1220_init(), ads1220_periodic(), ads1220_read(), ads1220_send_config(), adxl345_i2c_event(), adxl345_i2c_init(), adxl345_i2c_periodic(), adxl345_i2c_read(), adxl345_i2c_send_config(), adxl345_i2c_start_configure(), adxl345_i2c_tx_reg(), adxl345_spi_event(), adxl345_spi_init(), adxl345_spi_periodic(), adxl345_spi_read(), adxl345_spi_send_config(), adxl345_spi_start_configure(), adxl345_spi_write_to_reg(), agl_cb(), agl_cb(), agl_cb(), agl_dist_init(), agl_valid(), ahrs_aligner_init(), ahrs_aligner_run(), ahrs_dcm_init(), ahrs_dcm_propagate(), ahrs_dcm_update_gps(), ahrs_dcm_update_mag(), ahrs_dcm_wrapper_init(), ahrs_fc_init(), ahrs_fc_realign_heading(), ahrs_fc_update_accel(), ahrs_fc_update_gps(), ahrs_fc_update_heading(), ahrs_fc_update_mag_2d(), ahrs_fc_update_mag_2d_dumb(), ahrs_fc_update_mag_full(), ahrs_fc_wrapper_init(), ahrs_finv_wrapper_init(), ahrs_float_cmpl_wrapper_enable(), ahrs_float_dcm_wrapper_enable(), ahrs_float_get_euler_from_accel_mag(), ahrs_float_get_quat_from_accel(), ahrs_float_get_quat_from_accel_mag(), ahrs_float_invariant_init(), ahrs_float_invariant_propagate(), ahrs_float_invariant_update_mag(), ahrs_float_invariant_wrapper_enable(), ahrs_float_mlkf_wrapper_enable(), ahrs_icq_init(), ahrs_icq_propagate(), ahrs_icq_realign_heading(), ahrs_icq_update_accel(), ahrs_icq_update_gps(), ahrs_icq_update_heading(), ahrs_icq_update_mag_2d(), ahrs_icq_update_mag_full(), ahrs_icq_wrapper_init(), ahrs_int_cmpl_quat_wrapper_enable(), ahrs_int_get_euler_from_accel_mag(), ahrs_int_get_quat_from_accel(), ahrs_int_get_quat_from_accel_mag(), ahrs_madgwick_propagate(), ahrs_madgwick_wrapper_enable(), ahrs_madgwick_wrapper_init(), ahrs_mlkf_init(), ahrs_mlkf_update_accel(), ahrs_mlkf_wrapper_init(), ahrs_vectornav_event(), ahrs_vectornav_init(), ahrs_vectornav_propagate(), ahrs_vectornav_wrapper_enable(), ahrs_vectornav_wrapper_init(), air_data_init(), air_data_parse_WIND_INFO(), airspeed_adc_init(), airspeed_adc_update(), airspeed_amsys_downlink(), airspeed_amsys_read_event(), airspeed_amsys_read_periodic(), airspeed_cb(), airspeed_cb(), airspeed_consistency_init(), airspeed_consistency_periodic(), airspeed_ets_downlink(), airspeed_ets_init(), airspeed_ets_read_event(), airspeed_ets_read_periodic(), airspeed_ms45xx_i2c_change_tau(), airspeed_otf_event(), airspeed_otf_parse(), airspeed_periodic(), airspeed_uADC_event(), airspeed_uadc_parse(), airspeed_uADC_periodic(), airspeed_uavcan_cb(), airspeed_uavcan_downlink(), airspeed_uavcan_init(), ak8963_event(), ak8975_event(), aligner_cb(), aligner_cb(), aligner_cb(), aligner_cb(), aligner_cb(), aligner_cb(), aligner_cb(), alt_filter_periodic(), alt_kalman(), ami601_read(), amt22_checkbit(), amt22_init(), analyze_linear_flow_field(), angle_to_wall(), aoa_adc_init(), aoa_adc_update(), aoa_pwm_init(), aoa_pwm_update(), aoa_t4_init(), aoa_t4_update(), apogee_baro_event(), append_values_to_memory(), appendSmartPortData(), simple_quad_sim.BulletFDM::apply_force_and_moments(), approach_moving_target_init(), approach_moving_target_set_low_pass_freq(), ardrone_baro_event(), ArduIMU_event(), ArduIMU_periodic(), ArduIMU_periodicGPS(), are_buffers_empty(), are_setpoint_and_angle_reached(), ascii_to_osd_c(), atmega_i2c_cam_ctrl_event(), atmega_i2c_cam_ctrl_send(), attitude_loop(), attitude_ref_euler_float_init(), attitude_ref_euler_float_update(), attitude_ref_euler_int_update(), attitude_ref_float_saturate_naive(), attitude_ref_int_saturate_naive(), attitude_ref_quat_float_enter(), attitude_ref_quat_float_update(), attitude_ref_quat_int_enter(), attitude_ref_quat_int_init(), attitude_ref_quat_int_set_max_pdot(), attitude_ref_quat_int_set_max_qdot(), attitude_ref_quat_int_set_max_rdot(), attitude_ref_quat_int_update(), attitude_run_fb(), attitude_run_fb(), attitude_run_ff(), attitude_run_ff(), autopilot_arming_check_valid(), autopilot_check_in_flight(), autopilot_event(), autopilot_failsafe_checks(), autopilot_firmware_init(), autopilot_generated_init(), autopilot_generated_on_rc_frame(), autopilot_generated_periodic(), autopilot_generated_set_mode(), autopilot_generated_set_motors_on(), autopilot_guided_goto_body_relative(), autopilot_guided_goto_ned(), autopilot_guided_goto_ned_relative(), autopilot_guided_move_ned(), autopilot_guided_parse_GUIDED(), autopilot_guided_parse_GUIDED_FULL(), autopilot_guided_update(), autopilot_in_flight_end_detection(), autopilot_init(), autopilot_periodic(), autopilot_set_kill_throttle(), autopilot_set_mode(), autopilot_static_init(), autopilot_static_on_rc_frame(), autopilot_static_periodic(), autopilot_static_set_mode(), autopilot_static_SetModeHandler(), avi_isp_get_offsets_fd(), background_processes(), background_processes_16bit(), ballistic_touchdown_run(), baro_amsys_read_event(), baro_amsys_read_periodic(), baro_apply_calibration(), baro_apply_calibration_temp(), baro_bmp280_event(), baro_bmp280_init(), baro_bmp3_event(), baro_bmp3_init(), baro_bmp_event(), baro_board_read_from_current_register(), baro_board_read_from_register(), baro_board_send_config_abs(), baro_board_send_reset(), baro_board_set_current_register(), baro_board_write_to_register(), baro_cb(), baro_cb(), baro_cb(), baro_ets_read_event(), baro_event(), baro_hca_read_event(), baro_init(), baro_mpl3115_read_event(), baro_MS5534A_event(), baro_MS5534A_event_task(), baro_MS5534A_init(), baro_MS5534A_send(), baro_ms5611_event(), baro_ms5611_init(), baro_ms5611_periodic_check(), baro_ms5611_send_coeff(), baro_periodic(), baro_scp_event(), baro_sim_periodic(), baro_update_logic(), bat_checker_periodic(), bat_voltage_ardrone2_init(), bat_voltage_ardrone2_periodic(), battery_monitor_check_i2c_transaction(), battery_monitor_get_address(), battery_monitor_init(), battery_monitor_init_balance(), battery_monitor_init_bus(), battery_monitor_read_balance_ports(), battery_monitor_read_bus(), BayerToYUV(), bf_adcGetChannel(), bf_delay(), bf_delayMicroseconds(), bf_featureIsEnabled(), bf_IOConfigGPIO(), bf_IOGetByTag(), bf_IOHi(), bf_IOInit(), bf_IOLo(), bf_IORead(), bf_IOToggle(), bmi088_i2c_init(), bmi088_i2c_write_to_reg(), bmi088_send_config(), bmp085_compensated_pressure(), bmp085_event(), bmp085_init(), bmp085_periodic(), bmp085_read_eeprom_calib(), bmp280_config(), bmp280_event(), bmp280_init(), bmp280_periodic(), bmp280_register_read(), bmp280_register_write(), bmp3_i2c_event(), bmp3_i2c_init(), bmp3_i2c_periodic(), bmp3_pow(), board_init(), boardInit(), bound_commands(), bound_commands_step(), bound_g_mat(), bound_or_zero(), bound_v_from_a(), bound_vz_sp(), build_nmea_sentence(), buildDmaConfig(), buildDshotDmaBuffer(), buildTelemetryFrame(), c2d(), calc_edgeflow_tot(), calc_fast9_lukas_kanade(), calc_flight_time_left(), calc_g1_element(), calc_G1_G2_RW(), calc_g2_element(), calc_lm35(), calc_model(), calc_normalization(), calc_ntc(), calc_previous_frame_nr(), calc_sht(), calculate_edge_displacement(), calculate_edge_histogram(), calculate_new_heading(), calculate_wind_no_airspeed(), calculateCRC(), calculateCrc8(), calculateForwards(), calculateForwards(), calibrate_coeff(), calibrate_zero(), calibration(), cam_gimbal_ac_target(), cam_gimbal_angles(), cam_gimbal_init(), cam_gimbal_joystick(), cam_gimbal_nadir(), cam_gimbal_periodic(), cam_gimbal_run(), cam_gimbal_set_ac_id(), cam_gimbal_set_angles_callback(), cam_gimbal_set_angles_deg(), cam_gimbal_set_angles_rad(), cam_gimbal_set_lock(), cam_gimbal_set_mode(), cam_gimbal_set_pan_command(), cam_gimbal_set_target_pos(), cam_gimbal_set_tilt_command(), cam_gimbal_set_wp_id(), cam_gimbal_setup_angles(), cam_gimbal_setup_mounting(), cam_gimbal_target(), cam_gimbal_waypoint_target(), camera_cb(), can_dlc_to_len(), can_frame_cb(), can_fuelcell_init(), can_fuelcell_send_telemetry(), can_hw_init(), can_register_callback(), can_start(), can_thd_rx(), can_transmit_frame(), canConfigureIface(), cc2500_delayMicroseconds(), cc2500_init(), cc2500_settings_init(), cc2500ReadFifo(), cc2500SetPower(), cc2500SpiDetect(), cc2500SpiInit(), cc2500WriteFifo(), change_rep(), change_rep(), change_rep(), changeRollYawPhase(), char_available(), charge_sens_event(), chdk_pipe_deinit(), chdk_pipe_init(), chdk_pipe_shoot(), check_alpha(), check_anchor_timeout(), check_and_compute_data(), check_border(), check_color_snake_gate_detection(), check_color_yuv422(), check_contiguity(), check_for_nan(), check_free_space(), check_gate_initial(), check_gate_outline(), check_inside(), check_line(), check_parachute_arming(), check_parachute_trigger(), check_probs(), checkStatesUpdated(), chibios_sdlog_init(), chirp_call(), chirp_is_running(), chirp_pos(), chirp_pos_a_ref(), chirp_pos_j_ref(), chirp_pos_p_ref(), chirp_pos_v_ref(), chirp_update(), chooseRandomIncrementAvoidance(), chooseRandomIncrementAvoidance(), chprintf(), chsnprintf(), chvprintf(), chvsnprintf(), gaia.GaiaWindow::closeEvent(), closing_OCV(), cloud_sensor_callback(), cloud_sensor_filtering(), cloud_sensor_init(), cloud_sim_detect(), cloud_sim_move(), cloud_sim_reset(), cmd_abi(), cmd_info(), cmd_mem(), cmp_array(), cmp_flow(), cmp_i(), CN_calculate_target(), CN_escape_velocity(), CN_matrix_butterworth(), CN_matrix_Kalman_filter(), CN_potential_heading(), CN_potential_velocity(), CN_vector_escape_velocity(), CN_vector_velocity(), collective_tracking_control(), color_object_detector_init(), color_object_detector_periodic(), colorbgr_opencv_to_yuv422(), colorfilter_func(), colorfilter_init(), coloryuv_opencv_to_yuv422(), comm_send_ch(), comm_send_ch(), command_from_transition(), commands_init(), common_len(), common_nav_periodic_task(), compensate_pressure(), compensate_pressure(), compensate_temperature(), compensate_temperature(), compute_1e_filter_alpha(), compute_accel_from_speed_sp(), compute_ahrs_representations(), compute_body_orientation_and_rates(), compute_body_orientation_and_rates(), compute_body_orientation_and_rates(), compute_cell_bayes(), compute_dist2_to_home(), compute_error_gains_order_2_vect_3(), compute_error_gains_order_3_vect_3(), compute_ff_vel(), compute_ground_speed(), compute_oval_points(), compute_reference_gains_order_2_vect_3(), compute_reference_gains_order_3_vect_3(), compute_tas_factor(), compute_TOD(), compute_wls_lower_bounds(), compute_wls_u_scaler(), compute_wls_upper_bounds(), compute_wls_v_scaler(), computeOptiTrack(), configure_isp(), configure_socket(), cont_hdl(), contour_func(), control_error_attitude(), control_error_rate(), control_error_thrust(), control_mixing_heewing_attitude_direct(), control_mixing_heewing_attitude_plane(), control_mixing_heewing_manual(), control_mixing_heewing_nav_run(), convert_angle_x100_to_raw(), convert_walls_to_ltp(), copilot_init(), copilot_parse_cam_payload_dl(), copilot_parse_cam_snapshot_dl(), copilot_parse_copilot_status_dl(), copilot_parse_move_wp_dl(), copilot_parse_payload_command_dl(), copilot_periodic(), copy_left_img_func(), copy_right_img_func(), covariance_f(), covariance_i(), cpu_ticks_of_nsec(), cpu_ticks_of_sec(), cpu_ticks_of_usec(), crc_packet(), create_bezier_spline(), create_tag(), CrossProductZ(), ctc_init(), ctc_target_send_info_to_nei(), ctrl_eff_scheduling_init(), ctrl_eff_scheduling_periodic(), ctrl_module_run(), ctrl_module_run(), ctrl_windtunnel_init(), cv_add_to_device(), cv_add_to_device_async(), cv_async_function(), cv_async_thread(), cv_blob_locator_event(), cv_blob_locator_func(), cv_blob_locator_init(), cv_marker_func(), cv_run_device(), cv_target_localization_report_mark(), cv_window_func(), cyclone_f_stb_u(), cyclone_f_stb_x(), cyclone_obm_forces(), cyclone_obm_moments(), cyrf6936_event(), cyrf6936_init(), cyrf6936_multi_write(), cyrf6936_read_block(), cyrf6936_read_register(), cyrf6936_read_rx_irq_status_packet(), cyrf6936_send(), cyrf6936_write(), cyrf6936_write_block(), cyrf6936_write_chan_sop_data_crc(), cyrf6936_write_register(), data_actuators_t4_out(), datalink_parse_PING(), daxpy(), dc_circle(), dc_ctrl_parrot_mykonos_autoshoot(), dc_ctrl_parrot_mykonos_command(), dc_ctrl_parrot_mykonos_init(), dc_ctrl_parrot_mykonos_periodic(), dc_distance(), dc_expo_cb(), dc_info(), dc_periodic(), dc_send_command(), dc_send_command_common(), dc_set_expo(), dc_shoot_rc_periodic(), dc_survey(), dcf_init(), ddot(), debug_snd_evt_i(), debug_snd_evt_inl(), debug_snd_evt_nl(), debug_vect(), debug_vect(), decawave_anchorless_communication_event(), decay_map(), decode_ahrspacket(), decode_gpspacket(), decode_hott_buffer(), decode_imupacket(), decode_optical_flow_msg(), decode_sbus_buffer(), decodeHighBytes(), default_compute_angles(), delayed_first_order_lowpass_propagate(), delta_phi(), depth_to_disp(), detect_contour_init(), detect_escape(), detect_gate_event(), detect_gate_func(), detect_gate_init(), detect_window(), detect_window_init(), detect_window_one_size(), detect_window_sizes(), detection_cb(), detectRequestStage(), dfu_command_event(), Dhane_distortion(), Dhane_undistortion(), DictionaryTrainingYUV(), digital_cam_uart_init(), dilation_OCV(), dim_mod(), direct_memory_logger_init(), direct_memory_logger_periodic(), directchprintf(), directchvprintf(), discrete_ekf_new(), discrete_ekf_no_north_fsym(), discrete_ekf_no_north_Fx(), discrete_ekf_no_north_G(), discrete_ekf_no_north_hsym(), discrete_ekf_no_north_Hx(), discrete_ekf_no_north_new(), discrete_ekf_no_north_predict(), discrete_ekf_no_north_update(), discrete_ekf_predict(), discrete_ekf_update(), disp_to_depth(), disp_to_depth_16bit(), disp_to_depth_img(), dispfixed_to_disp(), distance_drone_to_drone(), distance_equation(), distance_to_segment(), distance_to_wall(), distance_to_wall(), distance_to_wp(), distance_too_great(), distorted_pixels_to_normalized_coords(), distributed_circular(), DistributionExtraction(), dl_parse_msg(), DlCheckAndParse(), dma_lld_get_registers(), dma_lld_serve_interrupt(), dma_lld_start(), dma_lld_start_transfert(), dma_lld_stop(), dma_lld_stop_transfert(), dmaAcquireBus(), dmaErrCb(), dmaGetRegisters(), dmaGetStreamIndex(), dmaGetTransactionCounter(), dmaObjectInit(), dmaReleaseBus(), dmaReloadConf(), dmaStart(), dmaStartTransfert(), dmaStartTransfertI(), dmaStop(), dmaStopTransfert(), dmaStopTransfertI(), dmaTransfert(), dmaTransfertTimeout(), dnrm2(), double_eulers_of_quat(), double_quat_comp(), double_quat_norm(), double_quat_normalize(), double_quat_of_eulers(), double_quat_vmult(), double_rmat_comp(), double_rmat_identity(), double_rmat_inv(), double_rmat_of_eulers(), double_rmat_of_eulers_321(), double_rmat_of_quat(), double_rmat_transp_vmult(), double_rmat_vmult(), double_vect3_add_gaussian_noise(), double_vect3_get_gaussian_noise(), double_vect3_norm(), double_vect3_update_random_walk(), doublet_init(), doublet_is_running(), doublet_update(), downlink_init(), DownlinkSendWp(), DownlinkSendWpNr(), dpicco_event(), dqrank(), dqrdc(), dqrls(), dqrlss(), dqrsl(), dragspeed_init(), draw_edgeflow_img(), draw_gate(), draw_gate_color_polygon(), draw_gate_color_square(), DRAW_make_color(), DRAW_make_line(), draw_osd(), DRAW_set_fill_color(), DRAW_set_line_color(), DRAW_set_opacity(), Drift_correction(), drop_ball(), drop_zone_set(), dscal(), dshot_init_struct(), dshot_set_struct(), DshotErpsCheckCrc4(), DshotErpsEdtCentiVolts(), DshotErpsEdtCurrentAmp(), DshotErpsEdtStatus(), DshotErpsEdtStress(), DshotErpsEdtTempCentigrade(), DshotErpsEdtType(), DshotErpsGetEperiod(), DshotErpsGetFrame(), DshotErpsGetRpm(), DshotErpsIsEdt(), DshotErpsSetFromFrame(), DshotErpsSetFromRpm(), dshotGetTelemetry(), dshotRpmCaptureStart(), dshotRpmCaptureStop(), dshotRpmCatchErps(), dshotRpmGetFrame(), dshotSendFrame(), dshotSendSpecialCommand(), dshotSendThrottles(), dshotSetThrottle(), dshotStart(), dshotStop(), dshotTlmRec(), dswap(), dust_gp2y_event(), dw1000_range_arduino_event(), dw1000_range_arduino_init(), dw1000_range_arduino_parse(), eas_from_dynamic_pressure(), ec_3rd(), ec_3rd_att(), ec_3rd_pos(), ec_poles(), ecef_float_from_gps(), ecef_int_from_gps(), ecef_of_enu_point_d(), ecef_of_enu_point_f(), ecef_of_enu_point_i(), ecef_of_enu_pos_i(), ecef_of_enu_vect_d(), ecef_of_enu_vect_f(), ecef_of_enu_vect_i(), ecef_of_lla_d(), ecef_of_lla_f(), ecef_of_lla_i(), ecef_of_ned_point_d(), ecef_of_ned_point_f(), ecef_of_ned_point_i(), ecef_of_ned_pos_i(), ecef_of_ned_vect_d(), ecef_of_ned_vect_f(), ecef_of_ned_vect_i(), ecef_vel_float_from_gps(), ecef_vel_int_from_gps(), eeprom25AA256_event(), eeprom25AA256_init(), eeprom25AA256_read(), eff_scheduling_cyfoam_init(), eff_scheduling_cyfoam_periodic(), eff_scheduling_falcon_init(), eff_scheduling_falcon_periodic(), eff_scheduling_falcon_report(), eff_scheduling_generic_init(), eff_scheduling_generic_periodic(), eff_scheduling_periodic_a(), eff_scheduling_periodic_b(), eff_scheduling_rotwing_init(), eff_scheduling_rotwing_schedule_liftd(), eff_scheduling_rotwing_update_aileron_effectiveness(), eff_scheduling_rotwing_update_airspeed(), eff_scheduling_rotwing_update_elevator_effectiveness(), eff_scheduling_rotwing_update_flaperon_effectiveness(), eff_scheduling_rotwing_update_hover_motor_effectiveness(), eff_scheduling_rotwing_update_MMOI(), eff_scheduling_rotwing_update_pusher_effectiveness(), eff_scheduling_rotwing_update_rudder_effectiveness(), eff_scheduling_rotwing_update_wing_angle(), ekf_aw_get_elevator_force(), ekf_aw_get_fuselage_force(), ekf_aw_get_hover_force(), ekf_aw_get_meas_cov(), ekf_aw_get_process_cov(), ekf_aw_get_pusher_force(), ekf_aw_get_state_cov(), ekf_aw_get_wing_force(), ekf_aw_propagate(), ekf_aw_wrapper_fetch(), ekf_aw_wrapper_init(), ekf_aw_wrapper_periodic(), ekf_f(), ekf_F(), ekf_init(), ekf_L(), ekf_measurement_step(), ekf_prediction_step(), ekf_range_init(), ekf_range_predict(), ekf_range_update_dist(), ekf_range_update_noise(), ekf_range_update_speed(), ekf_run(), ekf_set_diag(), ele_pref_sched(), electrical_ardrone2_setup(), electrical_init(), electrical_periodic(), encodeHighBytes(), encoder_amt22_periodic(), end_log(), enu_of_ecef_point_d(), enu_of_ecef_point_f(), enu_of_ecef_point_i(), enu_of_ecef_pos_i(), enu_of_ecef_vect_d(), enu_of_ecef_vect_f(), enu_of_ecef_vect_i(), enu_of_lla_point_d(), enu_of_lla_point_f(), enu_of_lla_point_i(), enu_of_lla_pos_i(), enu_of_lla_vect_i(), eperiodEncode(), eperiodToPacked(), erosion_OCV(), error_output(), error_output(), esc32_filter_data(), esc32_get_float(), esc32_init(), esc32_msg_send(), esc32_parse_msg(), esc32_periodic(), esc32_put_char(), esc32_put_float(), esc32_put_short(), esc32_send(), esc32_send_command(), esc_msg_send(), escape_process(), evaluate_obm_f_stb_u(), evaluate_obm_f_stb_x(), evaluate_obm_forces(), evaluate_obm_moments(), event_i2c_abuse_test(), event_sysmon(), extra_pprz_dl_event(), extra_pprz_dl_init(), extra_pprz_dl_periodic(), extract_information_from_parameters(), extractPhiGamma(), extrapsh(), ezcurrent_read_event(), fast9_detect(), fast9_detect_pixel(), fast_make_offsets(), faulhaber_crc8(), faulhaber_parse_msg(), fbw_datalink_event(), fbw_datalink_periodic(), fbw_safety_check(), fc_read_msg(), feed_jsbsim(), fetch_actuators_t4(), fetch_state(), fifo_avail(), fifo_free(), fifo_get(), fifo_init(), fifo_put(), fill_bayesian_cell(), fill_free_cells(), filter_1euro_imu_init(), filter_bad_pixels(), filter_pqr(), filter_rates(), final_landing_procedure(), find_best_edge_coordinates(), find_best_edge_coordinates2(), find_contour(), mesonh.mesonh_atmosphere::find_ge(), mesonh.mesonh_atmosphere::find_gt(), find_launch_index(), mesonh.mesonh_atmosphere::find_le(), mesonh.mesonh_atmosphere::find_lt(), find_nearest_wall(), find_object_centroid(), findFreeNodeID(), FindInterceptOfTwoLines(), FindInterceptOfTwoLines(), FindInterceptOfTwoLines(), finite_difference(), finite_difference_from_filter(), fit_linear_flow_field(), fit_linear_model(), fit_linear_model_OF(), fit_linear_model_prior(), fletcher32(), flight_benchmark_init(), flight_benchmark_periodic(), flight_recorder_init(), flight_recorder_log_msg_up(), flight_recorder_periodic(), float_euler_dot_of_rates_vec(), float_eulers_norm(), float_eulers_of_quat(), float_eulers_of_quat_yxz(), float_eulers_of_quat_zxy(), float_eulers_of_rmat(), float_from_buf(), float_log_n(), float_mat2_mult(), float_mat3_mult(), float_mat_adjoint_4d(), float_mat_combine(), float_mat_copy(), float_mat_diagonal_scal(), float_mat_diff(), float_mat_div_scalar(), float_mat_exp(), float_mat_inv_2d(), float_mat_inv_3d(), float_mat_inv_4d(), float_mat_invert(), float_mat_minor(), float_mat_minor_4d(), float_mat_mul(), float_mat_mul_copy(), float_mat_mul_scalar(), float_mat_mul_transpose(), float_mat_norm_li(), float_mat_scale(), float_mat_sum(), float_mat_sum_scaled(), float_mat_transpose(), float_mat_transpose_square(), float_mat_vect_mul(), float_mat_vmul(), float_mat_zero(), float_norm_two_angles(), float_quat_comp(), float_quat_comp_inv(), float_quat_comp_inv_norm_shortest(), float_quat_comp_norm_shortest(), float_quat_derivative(), float_quat_derivative_lagrange(), float_quat_differential(), float_quat_integrate(), float_quat_integrate_fi(), float_quat_inv_comp(), float_quat_inv_comp_norm_shortest(), float_quat_invert(), float_quat_norm(), float_quat_normalize(), float_quat_of_axis_angle(), float_quat_of_eulers(), float_quat_of_eulers_yxz(), float_quat_of_eulers_zxy(), float_quat_of_orientation_vect(), float_quat_of_rmat(), float_quat_tilt_twist(), float_quat_vmul_right(), float_quat_vmult(), float_rates_add_gaussian_noise(), float_rates_integrate_fi(), float_rates_of_euler_dot(), float_rates_of_euler_dot_vec(), float_rates_vect3_integrate_fi(), float_rmat_comp(), float_rmat_comp_inv(), float_rmat_identity(), float_rmat_integrate_fi(), float_rmat_inv(), float_rmat_mult(), float_rmat_norm(), float_rmat_of_axis_angle(), float_rmat_of_eulers_312(), float_rmat_of_eulers_321(), float_rmat_of_quat(), float_rmat_ratemult(), float_rmat_reorthogonalize(), float_rmat_transp_mult(), float_rmat_transp_ratemult(), float_rmat_transp_vmult(), float_rmat_vmult(), float_vect2_bound_in_2d(), float_vect2_norm(), float_vect2_scale_in_2d(), float_vect3_add_gaussian_noise(), float_vect3_bound_in_2d(), float_vect3_bound_in_3d(), float_vect3_integrate_fi(), float_vect3_norm(), float_vect3_norm_two_points(), float_vect3_scale_in_2d(), float_vect_dot_product(), float_vect_norm(), float_vect_sdiv(), floor_detection_cb(), fly_to_xy(), follow_diagonal_approach(), follow_me(), follow_me_parse_target_pos(), follow_me_periodic(), follow_me_set_wp(), follow_wp(), formation_flight(), formation_init(), formation_pre_call(), framed_ring_buffer_available(), framed_ring_buffer_drop_last(), framed_ring_buffer_get(), framed_ring_buffer_put(), frameToPacket(), frsky_x_serial_check_free_space(), frsky_x_serial_put_byte(), frsky_x_serial_send_message(), frSkyDHandlePacket(), frSkyDSetRcData(), frSkySpiDataReceived(), frSkySpiProcessFrame(), frSkyXHandlePacket(), frSkyXProcessFrame(), frSkyXSetRcData(), fuelcell_uavcan_cb(), full_read(), full_write(), fx_elevator(), fx_fuselage(), fx_fy_hover(), fx_wing(), fy_wing(), fz_elevator(), fz_fuselage(), fz_hover(), fz_wing(), G1G2_oneloop(), gain_scheduling_init(), gain_scheduling_periodic(), gate_refine_corners(), gazebo_read(), gazebo_write(), gc_of_gd_lat_d(), gcrDecode(), gcrEncode(), gec_add_to_whitelist(), gec_bytes_to_counter(), gec_clear_sts(), gec_counter_to_bytes(), gec_decrypt_message(), gec_derive_key_material(), gec_dl_event(), gec_dl_init(), gec_encrypt_message(), gec_generate_ephemeral_keys(), gec_process_msg1(), gec_process_msg3(), gec_sts_init(), gec_transport_init(), geiger_counter_event(), generate_reference_attitude(), generate_reference_rate(), generate_reference_thrust(), generic_com_periodic(), generic_uart_event(), geo_mag_event(), georeference_filter(), georeference_project(), georeference_run(), get_acc(), get_act_state_oneloop(), get_actuator_idx(), get_actuator_state(), get_actuator_telem(), get_ajusted_value(), get_ang_acc(), get_ang_vel(), get_avg_disparity(), get_border_response(), get_butterworth_2_complementary_array(), get_butterworth_2_complementary_rates(), get_butterworth_2_complementary_vect3(), get_butterworth_2_low_pass_array(), get_butterworth_2_low_pass_rates(), get_butterworth_2_low_pass_vect3(), get_butterworth_4_complementary(), get_butterworth_4_complementary_array(), get_butterworth_4_complementary_rates(), get_butterworth_4_complementary_vect3(), get_butterworth_4_low_pass_array(), get_butterworth_4_low_pass_rates(), get_butterworth_4_low_pass_vect3(), get_circle_from_speeds(), get_cpu_load_percent(), get_diff(), get_entropy(), get_first_order_complementary(), get_first_order_complementary_array(), get_first_order_complementary_rates(), get_first_order_complementary_vect3(), get_first_order_low_pass_array(), get_first_order_low_pass_rates(), get_first_order_low_pass_vect3(), get_first_order_zoh_low_pass_array(), get_fix_mode(), get_gaussian_noise(), get_humidity(), get_img_type(), get_indices_without_replacement(), get_integral_image(), get_msg(), simple_quad_sim.BulletFDM::get_observation(), get_orient(), get_pitot(), mesonh.mesonh_atmosphere.MesoNHAtmosphere::get_points(), get_pos(), get_pressure(), get_rc_pitch(), get_rc_pitch_f(), get_rc_roll(), get_rc_roll_f(), get_rc_yaw(), get_rc_yaw_f(), get_rotation_at_timestamp(), get_rssi(), get_rt_prio(), get_second_order_complementary(), get_size_divergence(), get_stack_free(), get_sum_disparities(), get_sys_time_float(), get_sys_time_msec(), get_sys_time_usec(), get_sys_time_usec100(), get_tas_factor(), get_temp(), get_thread_delta(), get_thread_load_x10(), get_time_to_home(), get_transfer_id(), get_transport_delay(), get_transport_delay_array(), get_two_intersects(), get_uavcan_hardware_version(), get_uavcan_software_version(), get_uavcan_status(), get_vel(), get_vertical_thrust_coeff(), mesonh.mesonh::get_wind(), mesonh.mesonh_atmosphere.MesoNHAtmosphere::get_wind(), get_window_response(), get_world_position_from_image_points(), getAmountPeaks(), getBind1(), getBind2(), getch(), getCrossCacheBoundaryAwareSize(), getDescriptor(), getExpectedStage(), getFileName(), getMedian(), getMedian16bit(), getMinimum(), getSerialData(), getTimerWidth(), gh_ref_init(), gh_saturate_accel(), gh_saturate_speed(), gh_set_max_speed(), gh_set_omega(), gh_set_ref(), gh_set_tau(), gh_set_zeta(), gh_update_ref_from_accel_sp(), gh_update_ref_from_pos_sp(), gh_update_ref_from_speed_sp(), gimbal_caddx_compute_angles(), gimbal_caddx_gm3_init(), gimbal_caddx_gm3_periodic(), glide_wing_lock_event(), glide_wing_lock_init(), glide_wing_lock_periodic(), gls_compute_TOD(), gls_run(), gls_start(), gpio_cam_ctrl_init(), gpio_cam_ctrl_periodic(), gpio_clear(), gpio_clear(), gpio_ext_pca95xx_clear(), gpio_ext_pca95xx_get(), gpio_ext_pca95xx_lazy_init(), gpio_ext_pca95xx_set(), gpio_ext_pca95xx_setup_input(), gpio_ext_pca95xx_setup_output(), gpio_ext_pca95xx_toggle(), gpio_get(), gpio_get(), gpio_init(), gpio_set(), gpio_set(), gpio_setup_input(), gpio_setup_input(), gpio_setup_input_pulldown(), gpio_setup_input_pullup(), gpio_setup_output(), gpio_setup_pin_af(), gpio_setup_pin_af_pullup(), gpio_setup_pin_analog(), gpio_toggle(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), gps_datalink_init(), gps_datalink_parse_EXTERNAL_POSE(), gps_datalink_parse_EXTERNAL_POSE_SMALL(), gps_datalink_parse_REMOTE_GPS_LOCAL(), gps_datalink_publish(), gps_day_number(), gps_feed_value(), gps_fix_valid(), gps_has_been_good(), gps_init(), gps_inject_data(), gps_intermcu_parse_IMCU_REMOTE_GPS(), gps_mtk_event(), gps_mtk_init(), gps_mtk_msg(), gps_mtk_parse(), gps_mtk_read_message(), gps_mtk_time2itow(), gps_nmea_event(), gps_nmea_get_system_date_str(), gps_parse_GPS_INJECT(), gps_parse_RTCM_INJECT(), gps_periodic_check(), gps_piksi_event(), gps_piksi_init(), gps_piksi_publish(), gps_piksi_read(), gps_piksi_write(), gps_relpos_cb(), gps_sim_publish(), gps_sirf_event(), gps_sirf_msg(), gps_skytraq_event(), gps_skytraq_msg(), gps_skytraq_parse(), gps_skytraq_read_message(), gps_time_since_last_3dfix(), gps_tow_from_sys_ticks(), gps_uavcan_cb(), gps_uavcan_init(), gps_ubx_event(), gps_ubx_i2c_init(), gps_ubx_i2c_periodic(), gps_ubx_i2c_read_event(), gps_ubx_init(), gps_ubx_msg(), gps_ubx_parse(), gps_ubx_parse_HITL_UBX(), gps_ubx_parse_nav_posecef(), gps_ubx_parse_nav_posllh(), gps_ubx_parse_nav_posutm(), gps_ubx_parse_nav_pvt(), gps_ubx_parse_nav_relposned(), gps_ubx_parse_nav_sat(), gps_ubx_parse_nav_sol(), gps_ubx_parse_nav_status(), gps_ubx_parse_nav_svinfo(), gps_ubx_parse_nav_velned(), gps_ubx_parse_velecef(), gps_ubx_read_message(), gps_ubx_ucenter_autobaud(), gps_ubx_ucenter_config_nav(), gps_ubx_ucenter_config_port(), gps_ubx_ucenter_config_port_poll(), gps_ubx_ucenter_config_sbas(), gps_ubx_ucenter_configure(), gps_ubx_ucenter_enable_msg(), gps_ubx_ucenter_event(), gps_ubx_ucenter_init(), gps_udp_init(), gps_udp_parse(), gptCb(), grayscale_opencv_to_yuv422(), greyDecode(), greyEncode(), ground_detect_init(), ground_detect_periodic(), ground_detect_set_offset_sensors(), ground_speed_of_course(), gsm_event(), gsm_got_line(), gsm_got_prompt(), gsm_init(), gsm_init_report(), gsm_parse(), gsm_receive_content(), gsm_send_report_continue(), guidance_flip_run(), guidance_h_from_nav(), guidance_h_init(), guidance_h_mode_changed(), guidance_h_run_accel(), guidance_h_run_pos(), guidance_h_run_speed(), guidance_h_set_body_acc(), guidance_h_set_body_vel(), guidance_h_update_reference(), guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_determine_wind_estimate(), guidance_hybrid_groundspeed_to_airspeed(), guidance_hybrid_h_run_pos(), guidance_hybrid_h_run_speed(), guidance_hybrid_init(), guidance_hybrid_set_cmd_i(), guidance_hybrid_v_run_accel(), guidance_hybrid_v_run_pos(), guidance_hybrid_v_run_speed(), guidance_hybrid_vertical(), guidance_indi_calcG(), guidance_indi_calcG(), guidance_indi_calcg_wing(), guidance_indi_calcg_wing(), guidance_indi_calcG_yxz(), guidance_indi_calcG_zyx(), guidance_indi_controller(), guidance_indi_controller(), guidance_indi_enter(), guidance_indi_get_liftd(), guidance_indi_hybrid_set_wls_settings(), guidance_indi_init(), guidance_indi_propagate_filters(), guidance_indi_quadplane_init(), guidance_indi_quadplane_propagate_filters(), guidance_indi_run(), guidance_indi_run_mode(), guidance_indi_run_mode(), guidance_indi_set_wls_settings(), guidance_module_enter(), guidance_module_run(), guidance_oneloop_run_mode(), guidance_opticflow_hover_init(), guidance_pid_h_run(), guidance_pid_h_run_pos(), guidance_pid_h_run_speed(), guidance_pid_init(), guidance_pid_v_run(), guidance_pid_v_run_pos(), guidance_pid_v_run_speed(), guidance_plane_attitude_from_nav(), guidance_plane_init(), guidance_plane_set_pitch(), guidance_plane_set_throttle(), guidance_plane_thrust_from_nav(), guidance_set_max_bank_angle(), guidance_set_max_climb_speed(), guidance_set_max_descend_speed(), guidance_v_init(), guidance_v_mode_changed(), guidance_v_run_accel(), guidance_v_run_pos(), guidance_v_run_speed(), guidance_v_set_th(), guidance_v_thrust_adapt(), guidance_v_update_ref(), gv_adapt_run(), gv_set_ref(), gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), gvf_control_2D(), gvf_ellipse_info(), gvf_get_two_intersects(), gvf_ik_control_2D(), gvf_ik_init(), gvf_ik_line(), gvf_init(), gvf_intercept_two_lines(), gvf_line(), gvf_line_info(), gvf_low_level_control_2D(), gvf_low_level_control_3D(), gvf_low_level_getState(), gvf_nav_approaching(), gvf_parametric_2d_bezier_splines_info(), gvf_parametric_2d_trefoil_info(), gvf_parametric_3d_ellipse_info(), gvf_parametric_3d_lissajous_info(), gvf_parametric_control_2D(), gvf_parametric_init(), gvf_sin_info(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_int_cb(), h(), h_ctl_attitude_loop(), h_ctl_course_loop(), h_ctl_init(), h_ctl_pitch_loop(), h_ctl_pitch_loop(), h_ctl_roll_loop(), h_ctl_roll_loop(), hackhd_autoshoot(), hackhd_command(), hackhd_init(), hackhd_periodic(), handle_battery(), handle_frame(), handle_ins_msg(), handle_ins_msg(), handle_ins_msg(), handle_msg_shoot(), handle_raw(), handle_raw_other(), handle_reply(), handle_spi_thd(), handleAllocationRequest(), handleNewStateValue(), heading_towards_setpoint_WNED(), heading_towards_waypoint(), hff_init(), hff_init_x(), hff_init_y(), hff_propagate(), hff_propagate_x(), hff_propagate_y(), hff_realign(), hff_update_gps(), hff_update_pos(), hff_update_vel(), hff_update_x(), hff_update_xdot(), hff_update_y(), hff_update_ydot(), high_speed_logger_direct_memory_init(), high_speed_logger_direct_memory_periodic(), high_speed_logger_spi_link_init(), high_speed_logger_spi_link_periodic(), hist_erase_older(), hist_is_space_for_new(), hist_restore_line(), hist_save_line(), hist_search(), hmc5843_idle_task(), hmc5843_module_periodic(), hmc5843_periodic(), home_direction(), horizontal_ctrl_module_run(), hott_check_serial_data(), hott_common_decode_event(), hott_common_init(), hott_enable_receiver(), hott_enable_transmitter(), hott_event(), hott_init(), hott_init_eam_msg(), hott_init_gam_msg(), hott_msgs_init(), hott_periodic(), hott_periodic_event(), hott_send_telemetry_data(), hott_update_eam_msg(), hott_update_gam_msg(), htond(), htonf(), humid_hih_periodic(), humid_htm_event(), humid_sht_crc(), humid_sht_init(), humid_sht_periodic(), humid_sht_periodic_i2c(), humid_sht_uart_event(), humid_sht_uart_parse(), hx711_event(), hx711_init(), i2c_abuse_send_transaction(), i2c_arch_init(), i2c_blocking_receive(), i2c_blocking_submit(), i2c_blocking_transceive(), i2c_blocking_transmit(), i2c_chibios_submit(), i2c_init(), i2c_linux_submit(), i2c_receive(), i2c_setbitrate(), i2c_smbus_access(), i2c_smbus_write_byte(), i2c_smbus_write_quick(), i2c_submit(), i2c_thread(), i2c_transceive(), i2c_transmit(), i4_max(), i4_min(), icuoverflowcb(), icuperiodcb(), id_alloc_uavcan_cb(), id_idx(), image_add_border(), image_calculate_g(), image_convolution_3x3(), image_copy(), image_create(), image_difference(), image_draw_crosshair(), image_draw_line(), image_draw_line_color(), image_draw_rectangle(), image_free(), image_gradient_pixel(), image_gradients(), image_labeling(), image_multiply(), image_show_flow(), image_show_flow_color(), image_show_points(), image_show_points_color(), image_subpixel_window(), image_switch(), image_to_grayscale(), image_yuv422_colorfilt(), image_yuv422_downsample(), imin(), imu_accel_raw_cb(), imu_apogee_event(), imu_apogee_init(), imu_apogee_periodic(), imu_aspirin2_configure_mag_slave(), imu_aspirin2_event(), imu_aspirin2_init(), imu_aspirin_event(), imu_aspirin_i2c_event(), imu_aspirin_i2c_init(), imu_aspirin_i2c_periodic(), imu_aspirin_init(), imu_aspirin_periodic(), imu_bebop_event(), imu_bebop_init(), imu_bmi088_event(), imu_bmi088_init(), imu_cube_event(), imu_cube_init(), IMU_Daten_verarbeiten(), imu_disco_event(), imu_disco_init(), imu_disco_periodic(), imu_get_accel(), imu_get_gyro(), imu_get_mag(), imu_gyro_raw_cb(), imu_heater_gyro_raw_cb(), imu_heater_init(), imu_heater_periodic(), imu_heater_run(), imu_icm42688_init(), imu_init(), imu_mag_raw_cb(), imu_mpu9250_configure_mag_slave(), imu_mpu9250_event(), imu_mpu9250_init(), imu_mpu9250_report(), imu_mpu_hmc_event(), imu_mpu_hmc_init(), imu_mpu_hmc_periodic(), imu_mpu_i2c_event(), imu_mpu_i2c_init(), imu_mpu_spi_event(), imu_mpu_spi_init(), imu_nps_event(), imu_nps_init(), imu_pixhawk6x_init(), imu_px4_event(), imu_px4_init(), imu_px4_periodic(), imu_px4fmu_event(), imu_px4fmu_init(), imu_px4fmu_periodic(), imu_quality_assessment_periodic(), imu_set_body_to_imu_eulers(), imu_set_defaults_accel(), imu_set_defaults_gyro(), imu_set_defaults_mag(), imu_SetBodyToImuCurrent(), imu_SetBodyToImuPhi(), imu_SetBodyToImuPsi(), imu_SetBodyToImuTheta(), imu_temp_ctrl_init(), imu_temp_ctrl_periodic(), imu_vectornav_init(), imu_vectornav_periodic(), imu_vectornav_propagate(), IN_DMA_SECTION(), incidence_cb(), incidence_cb(), increase_nav_heading(), increase_nav_heading(), increase_nav_heading(), increase_nav_heading(), indexn(), indi_apply_actuator_butterworth_filters(), indi_apply_actuator_models(), indi_apply_actuator_notch_filters(), indi_apply_compensator_filters(), indi_apply_measurement_butterworth_filters(), indi_apply_measurement_notch_filters(), indi_apply_notch_filters(), indi_init_filters(), indx1d_a(), indx1d_b(), indx1d_c(), init_bat_checker(), init_butterworth_2_complementary(), init_butterworth_2_complementary_array(), init_butterworth_2_complementary_vect3(), init_butterworth_2_low_pass(), init_butterworth_2_low_pass_array(), init_butterworth_2_low_pass_int(), init_butterworth_2_low_pass_vect3(), init_butterworth_4_complementary(), init_butterworth_4_complementary_array(), init_butterworth_4_complementary_vect3(), init_butterworth_4_low_pass(), init_butterworth_4_low_pass_array(), init_butterworth_4_low_pass_int(), init_butterworth_4_low_pass_vect3(), init_calculator(), init_cf2(), init_cf4(), init_controller(), init_filter(), init_filters(), init_first_order_complementary(), init_first_order_complementary_array(), init_first_order_complementary_vect3(), init_first_order_high_pass(), init_first_order_low_pass(), init_first_order_low_pass_array(), init_first_order_low_pass_vect3(), init_first_order_zoh_low_pass(), init_first_order_zoh_low_pass_array(), init_gazebo(), init_grid(), init_grid_4(), init_jsbsim(), init_light(), init_ltp(), init_ltp(), init_ltp(), init_ltp(), init_ltp(), init_mf_daq(), init_msd_driver(), init_parachute(), init_photogrammetry_calculator(), init_pi_d_df(), init_pid_df(), init_pid_f(), init_poles(), init_poles_att(), init_poles_pos(), init_quat_butterworth_low_pass(), init_quat_second_order_low_pass(), init_random(), init_second_order_complementary(), init_second_order_low_pass(), init_second_order_low_pass_int(), init_sys_id_auto_doublets(), init_sysmon(), init_tag(), init_transport_delay(), init_transport_delay_array(), init_walls(), initCache(), initialiseData(), initialize_camera(), initializeSensor(), initSmartPortSensors(), initSmartPortTelemetryExternal(), input_capture_lld_serve_interrupt(), ins_act_feedback_cb(), ins_alt_float_init(), ins_alt_float_update_baro(), ins_alt_float_update_gps(), ins_ekf2_init(), ins_ekf2_parse_EXTERNAL_POSE(), ins_ekf2_publish_attitude(), ins_ekf2_remove_gps(), ins_ekf2_update(), ins_event_check_and_handle(), ins_ext_pose_init(), ins_ext_pose_init_from_flightplan(), ins_ext_pose_log_data(), ins_ext_pose_log_header(), ins_ext_pose_msg_update(), ins_float_invariant_align(), ins_float_invariant_init(), ins_float_invariant_propagate(), ins_float_invariant_reset_ref(), ins_float_invariant_reset_vertical_ref(), ins_float_invariant_update_baro(), ins_float_invariant_update_gps(), ins_float_invariant_update_mag(), ins_float_invariant_wrapper_init(), ins_flow_init(), ins_flow_update(), ins_gps_passthrough_init(), ins_init_origin_i_from_flightplan(), ins_int_init(), ins_int_propagate(), ins_int_update_gps(), ins_mekf_wind_get_accel_bias(), ins_mekf_wind_get_airspeed_body(), ins_mekf_wind_get_rates_bias(), ins_mekf_wind_init(), ins_mekf_wind_propagate(), ins_mekf_wind_propagate_ahrs(), ins_mekf_wind_update_airspeed(), ins_mekf_wind_update_baro(), ins_mekf_wind_update_incidence(), ins_mekf_wind_update_mag(), ins_mekf_wind_update_params(), ins_mekf_wind_update_pos_speed(), ins_mekf_wind_wrapper_init(), ins_module_propagate(), ins_module_update_gps(), ins_module_wrapper_init(), ins_ned_to_state(), ins_ned_to_state(), ins_optical_flow_cb(), ins_reset_filter(), ins_update_lidar(), ins_vectornav_init(), ins_vectornav_monitor(), ins_vectornav_propagate(), ins_xsens700_init(), ins_xsens_init(), insert_byte(), int32_atan2(), int32_atan2_2(), int32_eulers_dot_321_of_rates(), int32_eulers_of_quat(), int32_eulers_of_rmat(), int32_mat_mul(), int32_quat_comp(), int32_quat_comp_inv(), int32_quat_comp_inv_norm_shortest(), int32_quat_comp_norm_shortest(), int32_quat_derivative(), int32_quat_integrate_fi(), int32_quat_inv_comp(), int32_quat_inv_comp_norm_shortest(), int32_quat_norm(), int32_quat_of_axis_angle(), int32_quat_of_eulers(), int32_quat_of_rmat(), int32_quat_vmult(), int32_rates_of_eulers_dot_321(), int32_rmat_comp(), int32_rmat_comp_inv(), int32_rmat_identity(), int32_rmat_of_eulers_312(), int32_rmat_of_eulers_321(), int32_rmat_of_quat(), int32_rmat_ratemult(), int32_rmat_transp_ratemult(), int32_rmat_transp_vmult(), int32_rmat_vmult(), int32_sqrt(), int32_vect2_normalize(), int32_vect_find(), integrate_nd(), intercept_two_lines(), intermcu_dl_init(), intermcu_dl_on_msg(), intermcu_dl_repack(), intermcu_event(), intermcu_forward_uplink(), intermcu_init(), intermcu_parse_IMCU_COMMANDS(), intermcu_parse_IMCU_FBW_STATUS(), intermcu_periodic(), intermcu_send_commands(), intermcu_send_spektrum_bind(), intermcu_send_status(), intersection_boxes(), intersection_over_union(), invariant_model(), invariant_model(), invensense2_config(), invensense2_event(), invensense2_fix_config(), invensense2_init(), invensense2_parse_data(), invensense2_periodic(), invensense2_register_read(), invensense2_register_write(), invensense2_select_bank(), invensense3_456_config(), invensense3_456_event(), invensense3_456_init(), invensense3_456_parse_fifo_data(), invensense3_456_periodic(), invensense3_456_register_read(), invensense3_456_register_write(), invensense3_456_set_scalings(), invensense3_config(), invensense3_event(), invensense3_fix_config(), invensense3_init(), invensense3_parse_fifo_data(), invensense3_parse_reg_data(), invensense3_periodic(), invensense3_register_read(), invensense3_register_write(), invensense3_register_write_bank(), invensense3_reset_fifo(), invensense3_select_bank(), inverse_isometric_latitude_d(), inverse_isometric_latitude_f(), iomcu_set_heater_duty_cycle(), iomcu_write_registers(), ir_mlx_crc(), ir_mlx_event(), ir_mlx_periodic(), is_card_inserted(), is_heading_reached(), is_sequence_in_array(), is_setpoint_reached(), isometric_latitude_d(), isometric_latitude_f(), isometric_latitude_fast_d(), isometric_latitude_fast_f(), isp_get_statistics_yuv(), isp_request_statistics_yuv_window(), ist8310_configure(), ist8310_event(), ist8310_init(), ist8310_periodic(), ist8310_read(), isValidPacket(), itg3200_event(), itg3200_i2c_tx_reg(), itg3200_init(), itg3200_periodic(), itg3200_read(), itg3200_send_config(), itg3200_start_configure(), ivy_dl_init(), mesonh.mesonh::ivy_request_callback(), jevois_event(), jevois_extract_nb(), jevois_handle_msg(), jevois_init(), jevois_mavlink_event(), jevois_mavlink_filter_init(), jevois_mavlink_init(), jevois_mavlink_periodic(), jevois_parse(), jevois_report(), jevois_send_message(), jevois_send_state(), jevois_setmapping(), jevois_stream(), joystick_parse(), jpeg_close_bitstream(), jpeg_create_svs_header(), jpeg_DCT(), jpeg_encode_image(), jpeg_encodeMCU(), jpeg_huffman(), jpeg_initialization(), jpeg_quantization(), jpeg_read_400_format(), jpeg_read_422_format(), jpeg_write_markers(), jsbsimloc_to_loc(), jsbsimquat_to_quat(), jsbsimvec_to_rate(), jsbsimvec_to_vec(), kalmanCorrectionAltimetre(), kalmanCorrectionGPS(), kalmanEstimation(), kalmanInit(), ker_mul_3x3(), kernel_create(), kernel_free(), kill_gracefull(), KillGracefully(), kv_exists(), kv_get(), kv_set(), l3gd20_spi_event(), l3gd20_spi_init(), l3gd20_spi_send_config(), l3gd20_spi_write_to_reg(), laser_range_array_event(), laser_range_array_init(), laser_range_array_parse_msg(), learn_from_file(), led_disable(), led_init(), lidar_lite_downlink(), lidar_lite_init(), lidar_lite_periodic(), lidar_sf11_downlink(), lidar_sf11_init(), lidar_sf11_periodic(), lidar_vl53l5cx_init(), lidar_vl53l5cx_periodic(), light_scheduler_periodic(), light_solar_periodic(), light_temt_periodic(), light_ws2812_arch_init(), light_ws2812_arch_set(), line_fit(), linear_filter(), linear_kalman_filter_init(), linear_kalman_filter_predict(), linear_kalman_filter_update(), linear_measure(), lis302dl_spi_event(), lis302dl_spi_init(), lis302dl_spi_periodic(), lis302dl_spi_read(), lis302dl_spi_send_config(), lis302dl_spi_start_configure(), lis302dl_spi_write_to_reg(), lis3mdl_event(), lis3mdl_init(), lisa_l_baro_event(), lla_float_from_gps(), lla_from_jsbsim_geocentric(), lla_from_jsbsim_geodetic(), lla_int_from_gps(), lla_of_ecef_d(), lla_of_ecef_f(), lla_of_ecef_i(), lla_of_utm_d(), lla_of_utm_f(), lla_of_utm_i(), llh_from_jsbsim(), lm75_event(), lms_estimation(), lms_estimation(), load_texton_dictionary(), load_texton_distribution(), load_weights(), log_image(), logger_control_effectiveness_periodic(), logger_control_effectiveness_start(), logger_file_periodic(), logger_file_start(), logger_file_stop(), logger_file_write_header(), logger_file_write_row(), logger_log_msg_up(), logger_uart_periodic(), long_to_string_with_divisor(), lps25h_i2c_event(), lps25h_i2c_init(), lps25h_i2c_periodic(), lps25h_i2c_read(), lps25h_i2c_send_config(), lps25h_i2c_start_configure(), lps25h_i2c_tx_reg(), lps25h_readPressureMillibars(), lsm303d_spi_event(), lsm303d_spi_init(), lsm303d_spi_periodic(), lsm303d_spi_read(), lsm303d_spi_send_config(), lsm303d_spi_start_configure(), lsm303d_spi_tx_reg(), lsm303dlhc_i2c_event(), lsm303dlhc_i2c_init(), lsm303dlhc_i2c_periodic(), lsm303dlhc_i2c_read(), lsm303dlhc_i2c_send_config(), lsm303dlhc_i2c_start_configure(), lsm303dlhc_i2c_tx_reg(), lsm6_i2c_event(), lsm6_i2c_init(), lsm6_i2c_periodic(), lsm6_i2c_read(), lsm6_i2c_send_config(), lsm6_i2c_start_configure(), lsm6_i2c_tx_reg(), ltoa(), ltp_def_from_ecef_d(), ltp_def_from_ecef_f(), ltp_def_from_ecef_i(), ltp_def_from_lla_d(), ltp_def_from_lla_f(), ltp_def_from_lla_i(), ltp_of_ecef_rmat_from_lla_i(), LWC_callback(), lwc_cb(), lwc_cb(), lwc_cb(), lwc_from_buffer(), mag_calc(), mag_calib_hotstart_read(), mag_calib_hotstart_write(), mag_calib_send_state(), mag_calib_ukf_init(), mag_calib_ukf_run(), mag_calib_update_field(), mag_cb(), mag_cb(), mag_cb(), mag_cb(), mag_cb(), mag_cb(), mag_cb(), mag_cb(), mag_cb(), mag_freeze_check(), mag_hmc58xx_module_event(), mag_hmc58xx_module_init(), mag_hmc58xx_report(), mag_ist8310_module_event(), mag_ist8310_module_init(), mag_ist8310_report(), mag_lis3mdl_module_event(), mag_lis3mdl_module_init(), mag_lis3mdl_report(), mag_pitot_event(), mag_pitot_init(), mag_pitot_parse_msg(), mag_qmc5883l_module_event(), mag_qmc5883l_module_init(), mag_qmc5883l_report(), mag_rm3100_module_event(), mag_rm3100_module_init(), mag_rm3100_report(), mag_uavcan_cb(), mag_uavcan_cb2(), mag_uavcan_init(), mesonh.mesonh::main(), main(), main(), main(), main(), main_ap_event(), main_ap_init(), main_ap_periodic(), main_dl_parse_msg(), main_event(), main_event_task(), main_event_task(), main_fbw_event(), main_fbw_init(), main_fbw_parse_EMERGENCY_CMD(), main_fbw_periodic(), main_init(), main_init(), main_init(), main_init(), main_init(), main_init(), main_init(), main_periodic(), main_periodic_task(), main_periodic_task(), main_periodic_task(), main_periodic_task(), main_periodic_task(), main_recovery_event(), main_recovery_init(), main_recovery_periodic(), main_task_periodic(), makeDshotPacket(), MakeTables(), manage_flow_features(), marker(), mass_storage_thread(), mateksys3901l0x_init(), mateksys3901l0x_parse(), mateksys3901l0x_send_optical_flow(), mateksys_3901_l0x_scale_X(), mateksys_3901_l0x_scale_Y(), matrix_2_pingpong(), Matrix_Multiply(), mav_exercise_init(), mav_exercise_periodic(), mavlink_block_message_handler(), mavlink_common_message_handler(), mavlink_crc_accumulate(), mavlink_crc_calculate(), mavlink_crc_init(), mavlink_event(), mavlink_init(), mavlink_mission_init(), mavlink_mission_message_handler(), mavlink_mission_periodic(), mavlink_mission_set_timer(), mavlink_parse_payload(), mavlink_periodic(), mavlink_periodic_telemetry(), mavlink_register_msg(), mavlink_send_attitude(), mavlink_send_attitude(), mavlink_send_attitude_quaternion(), mavlink_send_autopilot_version(), mavlink_send_battery_status(), mavlink_send_block(), mavlink_send_block_count(), mavlink_send_extended_sys_state(), mavlink_send_global_position_int(), mavlink_send_gps_global_origin(), mavlink_send_gps_raw_int(), mavlink_send_gps_status(), mavlink_send_heartbeat(), mavlink_send_heartbeat(), mavlink_send_highres_imu(), mavlink_send_local_position_ned(), mavlink_send_mission_ack(), mavlink_send_params(), mavlink_send_rc_channels(), mavlink_send_set_mode(), mavlink_send_sys_status(), mavlink_send_system_time(), mavlink_send_vfr_hud(), mavlink_send_wp(), mavlink_wp_message_handler(), max11040_init(), max11040_periodic(), max1167_hw_feed_value(), max1168_init(), max7456_event(), max7456_init(), max7456_periodic(), max_speed_for_deceleration(), maximum_intensity(), mcp355x_init(), mcu_arch_init(), mcu_deep_sleep(), mcu_energy_save(), mcu_init(), mcu_reboot(), mean_f(), mean_i(), median_depth_to_point(), median_disparity_to_point(), median_filter_update(), memcpy_from_registers(), memcpy_to_registers(), memory_completly_erase(), memory_erase_4k(), memory_read_id(), memory_read_status_1(), memory_read_values(), memory_read_values_cb(), memory_send_wrdi(), memory_send_wren(), memory_write_values(), meteo_stick_event(), meteo_stick_init(), meteo_stick_periodic(), meteo_stick_send_data(), mf_daq_send_report(), mf_daq_send_state(), mf_ptu_init(), mf_ptu_periodic(), microrl_backspace(), microrl_get_complite(), microrl_init(), microrl_insert_char(), microrl_insert_text(), microrl_set_complete_callback(), microrl_set_execute_callback(), microrl_set_sigint_callback(), microrlComplet(), microrlExecute(), microrlPrint(), mission_get(), mission_get_from_index(), mission_get_registered(), mission_init(), mission_insert(), mission_nav_circle(), mission_nav_circle(), mission_nav_custom(), mission_nav_custom(), mission_nav_custom(), mission_nav_path(), mission_nav_path(), mission_nav_path(), mission_nav_segment(), mission_nav_segment(), mission_nav_segment(), mission_nav_wp(), mission_nav_wp(), mission_nav_wp(), mission_parse_CIRCLE(), mission_parse_CIRCLE_LLA(), mission_parse_CUSTOM(), mission_parse_END_MISSION(), mission_parse_GOTO_MISSION(), mission_parse_GOTO_WP(), mission_parse_GOTO_WP_LLA(), mission_parse_NEXT_MISSION(), mission_parse_PATH(), mission_parse_PATH_LLA(), mission_parse_SEGMENT(), mission_parse_SEGMENT_LLA(), mission_parse_UPDATE(), mission_point_of_lla(), mission_register(), mission_run(), mission_run(), ml_erase_4k_on_memory(), ml_erase_completely_memory(), ml_write_values_to_memory(), modeAlternate(), modeShell(), monitor_task(), motor_mixing_init(), motor_mixing_run(), motor_mixing_run_spinup(), moveWaypoint(), moveWaypoint(), moveWaypointForward(), moveWaypointForward(), mpl3115_configure(), mpl3115_event(), mpl3115_init(), mpl3115_periodic(), mpl3115_read(), mpl3115_send_config(), MPPT_ask(), MPPT_periodic(), mpu60x0_configure_i2c_slaves(), mpu60x0_i2c_event(), mpu60x0_i2c_write_to_reg(), mpu60x0_send_config(), mpu60x0_spi_event(), mpu60x0_spi_init(), mpu60x0_spi_write_to_reg(), mpu9250_configure_i2c_slaves(), mpu9250_i2c_event(), mpu9250_i2c_read(), mpu9250_i2c_write_to_reg(), mpu9250_send_config(), mpu9250_spi_event(), mpu9250_spi_init(), mpu9250_spi_write_to_reg(), mpu_set_and_wait(), mpu_set_and_wait(), mpu_wait_slave4_ready_cb(), mrdivide(), ms2100_event(), ms2100_init(), ms2100_periodic(), ms2100_read(), ms45xx_downlink(), ms45xx_i2c_event(), ms45xx_i2c_init(), ms5607_calc(), ms5611_calc(), ms5611_i2c_event(), ms5611_i2c_init(), ms5611_i2c_periodic(), ms5611_i2c_periodic_check(), ms5611_i2c_read(), ms5611_i2c_start_configure(), ms5611_i2c_start_conversion(), ms5611_prom_crc_ok(), ms5611_spi_event(), ms5611_spi_init(), ms5611_spi_periodic(), ms5611_spi_periodic_check(), ms5611_spi_read(), ms5611_spi_start_configure(), ms5611_spi_start_conversion(), msd_handle_end_point_notification(), msd_read_command_block(), msd_register_evt_connected(), msd_register_evt_ejected(), msd_scsi_process_inquiry(), msd_scsi_process_mode_sense_6(), msd_scsi_process_read_capacity_10(), msd_scsi_process_read_format_capacities(), msd_scsi_process_request_sense(), msd_scsi_process_send_diagnostic(), msd_scsi_process_start_read_write_10(), msd_scsi_process_start_stop_unit(), msd_scsi_process_test_unit_ready(), msd_scsi_set_sense(), msd_start_receive(), msd_start_transmit(), msd_wait_for_command_block(), msd_wait_for_isr(), msdConfigureHookI(), msdInit(), msdRequestsHook(), msdStart(), msdStop(), msgqueue_copy_send(), msgqueue_copy_send_timeout(), msgqueue_init(), msgqueue_is_empty(), msgqueue_is_full(), msgqueue_pop(), msgqueue_pop_timeout(), msgqueue_send(), msgqueue_send_timeout(), msgqueue_strerror(), mt9f002_calc_gain(), mt9f002_calc_resolution(), mt9f002_init(), mt9f002_mipi_stage1(), mt9f002_mipi_stage2(), mt9f002_mipi_stage3(), mt9f002_parallel_stage1(), mt9f002_parallel_stage2(), mt9f002_reset_color(), mt9f002_reset_exposure(), mt9f002_set_blanking(), mt9f002_set_exposure(), mt9f002_set_gains(), mt9f002_set_pll(), mt9f002_set_resolution(), mt9f002_setting_update_resolution(), mt9v117_config(), mt9v117_init(), mt9v117_write_patch(), mtostk_apply_polynomial(), mtostk_apply_polynomial_temp(), mtostk_get_calibrated_value(), mtostk_populate_cal_from_buffer(), mtostk_populate_float_array_from_buffer(), mtostk_populate_sensor_from_buffer(), mtostk_populate_uint_from_buffer(), mtostk_populate_uuid_from_buffer(), mtostk_seek_array_buffer(), mtostk_seek_scalar_buffer(), multi_ranger_init(), multi_ranger_read(), multi_ranger_report(), nav_advance_carrot(), nav_approaching(), nav_approaching(), nav_approaching_xy(), nav_bungee_takeoff_run(), nav_bungee_takeoff_setup(), nav_catapult_highrate_module(), nav_catapult_run(), nav_check_wp_time(), nav_check_wp_time(), nav_circle(), nav_circle(), nav_circle_get_count(), nav_circle_qdr(), nav_circle_XY(), nav_compute_baseleg(), nav_compute_final_from_glide(), nav_cube_run(), nav_cube_setup(), nav_eight(), nav_fish_velocity_run(), nav_flower_init(), nav_flower_run(), nav_flower_setup(), nav_glide(), nav_glide_alt(), nav_glide_points(), nav_goto_next_block(), nav_gvf_ellipse_XY(), nav_gvf_ik_ellipse_XY(), nav_gvf_ik_line_wp1_wp2(), nav_gvf_ik_line_wp_heading(), nav_gvf_ik_line_XY1_XY2(), nav_gvf_ik_segment_loop_wp1_wp2(), nav_gvf_ik_segment_loop_XY1_XY2(), nav_gvf_ik_segment_wp1_wp2(), nav_gvf_ik_segment_XY1_XY2(), nav_gvf_ik_sin_wp1_wp2(), nav_gvf_ik_sin_wp_alpha(), nav_gvf_ik_sin_XY_alpha(), nav_gvf_line_wp1_wp2(), nav_gvf_line_wp_heading(), nav_gvf_line_XY1_XY2(), nav_gvf_parametric_2D_bezier_run(), nav_gvf_parametric_2D_bezier_wp(), nav_gvf_parametric_2D_trefoil_XY(), nav_gvf_segment_loop_wp1_wp2(), nav_gvf_segment_loop_XY1_XY2(), nav_gvf_segment_wp1_wp2(), nav_gvf_segment_XY1_XY2(), nav_gvf_sin_wp1_wp2(), nav_gvf_sin_wp_alpha(), nav_gvf_sin_XY_alpha(), nav_gvf_survey_polygon_run(), nav_gvf_survey_polygon_setup(), nav_heli_spinup_run(), nav_heli_spinup_setup(), nav_home(), nav_hybrid_approaching(), nav_hybrid_circle(), nav_hybrid_goto(), nav_hybrid_route(), nav_init(), nav_init_block(), nav_lace_init(), nav_lace_run(), nav_lace_setup(), nav_land_at_loc(), nav_land_at_loc(), nav_land_here(), nav_land_here(), nav_land_run(), nav_land_run(), nav_launcher_run(), nav_line_border_run(), nav_line_init(), nav_line_osam_block_run(), nav_line_osam_run(), nav_line_run(), nav_move_waypoint(), nav_move_waypoint_enu(), nav_oval(), nav_oval(), nav_oval(), nav_parse_BLOCK(), nav_parse_BLOCK(), nav_parse_MOVE_WP(), nav_parse_MOVE_WP(), nav_periodic_task(), nav_poles_init(), nav_poles_init(), nav_poles_run(), nav_poles_setup_lla(), nav_poles_setup_wp(), nav_reset_alt(), nav_reset_reference(), nav_reset_utm_zone(), nav_rosette_init(), nav_rosette_run(), nav_rosette_setup(), nav_rotorcraft_init(), nav_route(), nav_route(), nav_route_xy(), nav_rover_init(), nav_send_waypoint(), nav_set_altitude(), nav_set_altitude(), nav_set_heading_deg(), nav_set_heading_towards(), nav_shake_start_acc_cb(), nav_shakestart_init(), nav_shakestart_periodic(), nav_shakestart_run(), nav_skid_landing_glide(), nav_skid_landing_run(), nav_skid_landing_setup(), nav_spiral_3D_init(), nav_spiral_3D_run(), nav_spiral_3D_setup(), nav_spiral_run(), nav_spiral_setup(), nav_survey_disc_run(), nav_survey_disc_setup(), nav_survey_hybrid_init(), nav_survey_hybrid_run(), nav_survey_hybrid_setup(), nav_survey_hybrid_setup_orientation(), nav_survey_hybrid_setup_towards(), nav_survey_poly_osam_ResetSweepNumber(), nav_survey_poly_osam_run(), nav_survey_poly_osam_setup(), nav_survey_poly_osam_setup_towards(), nav_survey_poly_run(), nav_survey_poly_setup(), nav_survey_poly_setup_towards(), nav_survey_polygon_run(), nav_survey_polygon_setup(), nav_survey_rectangle(), nav_survey_rectangle_init(), nav_survey_rectangle_rotorcraft_init(), nav_survey_rectangle_rotorcraft_run(), nav_survey_rectangle_rotorcraft_setup(), nav_survey_zamboni_setup(), nav_takeoff_and_landing_init(), nav_takeoff_from_here(), nav_takeoff_from_loc(), nav_takeoff_run(), nav_takeoff_run(), nav_throttle_curve_set(), nav_trinity_init(), nav_trinity_run(), nav_trinity_setup(), nav_update_waypoints_alt(), nav_vertical_raster_run(), nav_without_gps(), NavApproaching(), NavApproachingFrom(), NavCircleWaypoint(), navdata_baro_calib(), navdata_init(), navdata_publish_imu(), navdata_read(), navdata_update(), NavGlide(), NavGotoWaypoint(), NavSegment(), ned_of_ecef_point_d(), ned_of_ecef_point_f(), ned_of_ecef_point_i(), ned_of_ecef_pos_i(), ned_of_ecef_vect_d(), ned_of_ecef_vect_f(), ned_of_ecef_vect_i(), ned_of_lla_point_d(), ned_of_lla_point_f(), ned_of_lla_point_i(), ned_of_lla_pos_i(), ned_of_lla_vect_i(), ned_vel_float_from_gps(), ned_vel_int_from_gps(), neighbor_alignement(), neighbor_attraction(), neighbor_influence(), new_line_handler(), nextChannel(), nibble2hex(), nmea_calc_crc(), nmea_checksum(), nmea_configure(), nmea_convert_deg_to_DDMM(), nmea_gps_msg(), nmea_parse_GGA(), nmea_parse_GSA(), nmea_parse_GSV(), nmea_parse_msg(), nmea_parse_perdcrv(), nmea_parse_prop_msg(), nmea_parse_RMC(), nmea_send(), node_info_cb(), node_info_resp_cb(), normal_random_gen(), Normalize(), normalized_coords_to_distorted_pixels(), normalized_to_pixels(), notch_filter_init(), notch_filter_init(), notch_filter_set_bandwidth(), notch_filter_set_bandwidth(), notch_filter_set_filter_frequency(), notch_filter_set_filter_frequency(), notch_filter_set_sampling_frequency(), notch_filter_set_sampling_frequency(), notch_filter_update(), notch_filter_update(), nps_ap_data_loop(), nps_atmosphere_set_wind_dir(), nps_atmosphere_set_wind_ned(), nps_atmosphere_set_wind_speed(), nps_atmosphere_update(), nps_autopilot_init(), nps_autopilot_init(), nps_autopilot_run_step(), nps_electrical_init(), nps_fdm_init(), nps_fdm_run_step(), nps_fdm_run_step(), nps_fdm_set_turbulence(), nps_fdm_set_wind(), nps_fdm_set_wind_ned(), nps_flight_gear_loop(), nps_flightgear_init(), nps_flightgear_receive(), nps_flightgear_send(), nps_flightgear_send_fdm(), nps_hitl_impl_init(), nps_ivy_display(), nps_ivy_display_cb(), nps_ivy_init(), nps_ivy_run(), nps_ivy_send_WORLD_ENV_REQ(), nps_main_display(), nps_main_init(), nps_main_loop(), nps_main_parse_options(), nps_radio_and_autopilot_init(), nps_radio_control_joystick_init(), nps_radio_control_joystick_update(), nps_radio_control_spektrum_init(), nps_sensor_accel_init(), nps_sensor_accel_run_step(), nps_sensor_airspeed_run_step(), nps_sensor_aoa_run_step(), nps_sensor_baro_run_step(), nps_sensor_gps_init(), nps_sensor_gps_run_step(), nps_sensor_gyro_init(), nps_sensor_gyro_run_step(), nps_sensor_mag_init(), nps_sensor_mag_run_step(), nps_sensor_sideslip_run_step(), nps_sensor_sonar_run_step(), nps_sensor_temperature_run_step(), nps_sensors_init(), nps_sensors_loop(), nps_set_time_factor(), nps_update_launch_from_dl(), ntime_to_double(), OA_update(), object_detector(), object_detector1(), object_detector2(), object_tracking_init(), object_tracking_run(), obstacle_cb(), obtain_cell_xy(), offset_commands(), ofh_optical_flow_cb(), on_DL_SETTING(), on_serial_data_received(), on_start_element(), on_WORLD_ENV(), oneloop_andi_enter(), oneloop_andi_init(), oneloop_andi_propagate_filters(), oneloop_andi_RM(), oneloop_andi_run(), oneloop_andi_sideslip(), oneloop_from_nav(), onTransferReceived(), opa_controller_ap_disarm(), opa_controller_init(), opa_controller_init(), opa_controller_periodic(), opa_controller_periodic(), open_isp_fd(), open_log(), open_pagemap(), open_udp(), opencv_example(), opencv_func(), opencvdemo_init(), opening_OCV(), operator delete[](), operator new(), operator new[](), optical_flow_cb(), optical_flow_hover_init(), optical_flow_landing_init(), opticflow_calc_frame(), opticflow_calc_init(), opticflow_module_calc(), opticflow_module_init(), opticflow_module_run(), opticflow_pmw3901_init(), opticflow_pmw3901_publish(), opticflow_telem_send(), opticFlowLK(), opticFlowLK_flat(), orange_avoider_guided_init(), orange_avoider_guided_periodic(), orange_avoider_init(), orange_avoider_periodic(), orientationCalcEulers_f(), orientationCalcEulers_i(), orientationCalcQuat_f(), orientationCalcQuat_i(), orientationCalcRMat_f(), orientationCalcRMat_i(), orientationGetEulers_f(), orientationGetEulers_i(), orientationGetQuat_f(), orientationGetQuat_i(), orientationGetRMat_f(), orientationGetRMat_i(), orientationSetRMat_f(), orientationSetRMat_i(), osd_put_s(), out_of_segment_area(), Oval(), overlap_intervals(), p4_eval(), p4_halley(), packetToFrame(), parachute_compute_approach(), parse_acinfo_dl(), parse_calib_data(), parse_calib_data(), parse_ctc_target_CleanTable(), parse_ctc_target_RegTable(), parse_esc32(), parse_ins_msg(), parse_mavlink(), parse_mf_daq_msg(), parse_mora(), parse_rssi_dl(), parse_sensor_data(), parse_sensor_data(), parse_xsens700_msg(), parse_xsens_msg(), parseFormationSlot(), parseFormationStatus(), parseRegTable(), parseTcasRA(), parseTcasResolve(), parseThetaTable(), pca95xx_get_input(), pca9685_i2c_event(), pca9685_i2c_init(), pca9865_set_servo(), PCAP01_Control(), pcap01_event(), pcap01readRegister(), pcap01writeRegister(), pdec_dispatch_frame(), pdec_send_data(), pdec_send_frame(), percent_from_rc(), perform_sys_id_auto_doublets(), periodic_2Hz_openlog(), periodic_auto1_commands(), periodic_gas_engine_idle_trim(), periodic_light(), periodic_report_sysmon(), periodic_switch_uart(), periodic_sys_id_auto_doublets(), periodic_sysmon(), periodic_telemetry_err_report(), persistent_clear(), persistent_read(), persistent_write(), pfc_act_feedback_cb(), pfc_actuators_error(), pfc_actuators_init(), pfc_actuators_run(), pfc_actuators_start(), photogrammetry_calculator_update_camera2flightplan(), photogrammetry_calculator_update_flightplan2camera(), PID_divergence_control(), PID_divergence_control(), PID_flow_control(), pingpong_euler(), pipe_arch_init(), pipe_arch_periph_init(), pipe_char_available(), pipe_getch(), pipe_periph_init(), pipe_put_buffer(), pipe_receive(), pipe_send_message(), pipe_send_raw(), pipe_thread(), pixels_to_normalized(), pmw3901_init(), popen2(), pos_est_cb(), pose_periodic(), positive_non_zero(), post_disparity_crop_rect(), potential_task(), power_switch_init(), power_uavcan_battery_cb(), power_uavcan_circuit_cb(), power_uavcan_init(), power_uavcan_send_power_device(), ppm_arch_init(), ppm_decode_frame(), ppm_decode_frame_width(), ppm_event(), ppm_init(), pprz_bsem_init(), pprz_bsem_signal(), pprz_bsem_wait(), pprz_bsem_wait_timeout(), pprz_cholesky_float(), pprz_circfit_wei_float(), pprz_dl_event(), pprz_dl_init(), pprz_isa_altitude_of_pressure(), pprz_isa_height_of_pressure(), pprz_isa_height_of_pressure_full(), pprz_isa_pressure_of_altitude(), pprz_isa_pressure_of_height(), pprz_isa_ref_pressure_of_height_full(), pprz_itrig_sin(), pprz_mode_update(), pprz_mtx_init(), pprz_mtx_lock(), pprz_mtx_trylock(), pprz_mtx_unlock(), pprz_polyfit_float(), pprz_qr_float(), pprz_svd_float(), pprz_svd_solve_float(), pprz_terminate_autopilot_threads(), pprz_thread_create(), pprz_thread_create(), pprz_thread_exit(), pprz_thread_join(), pprz_thread_tryjoin(), pprzlog_tp_init(), predict_flow_vectors(), predict_gain(), predict_value(), preflight_check(), preflight_check_register(), preflight_checks_log_bypass(), preflight_error(), preflight_warning(), pressure_abs_cb(), pressure_diff_cb(), pressure_diff_cb(), pressureToAltMeters(), principal_points(), print_hex(), print_hex16(), print_hex32(), print_ins_flow_state(), print_prompt(), print_true_state(), process_data(), process_first_point_trinity(), process_new_point_lace(), process_new_point_rosette(), process_new_point_trinity(), processErpsDmaBuffer(), processSmartPortTelemetry(), propagate_state(), pt1FilterGain(), put_alt(), put_buffer(), put_horizontal_speed(), put_lat(), put_lat_lon_home(), put_lon(), put_route(), pwm_input_init(), pwm_sysfs_enable(), pwm_sysfs_init(), pwm_sysfs_set_duty(), pwm_sysfs_set_period(), pwmpcb(), px4_set_gimbal_angle_periodic(), px4flash_event(), px4flash_init(), px4flow_downlink(), px4flow_i2c_downlink(), px4flow_i2c_frame_cb(), px4flow_i2c_init(), px4flow_i2c_periodic(), px4flow_init(), py_check(), py_check_status(), pyramid_build(), pyramid_next_level(), pythag(), python_init(), qr(), qr_code_spi_link_periodic(), qr_e(), qr_solve(), qr_solve_wrapper(), qrcode_init(), qrscan(), quat_add(), quat_from_earth_cmd_f(), quat_from_earth_cmd_i(), quat_from_rpy_cmd_f(), quat_from_rpy_cmd_i(), quat_smul(), r8mat_amax(), r8mat_copy_new(), r8mat_l_solve(), r8mat_lt_solve(), r8mat_mtv_new(), r8vec_max(), radio_control_cc2500_event(), radio_control_cc2500_init(), radio_control_feed(), radio_control_init(), radio_control_periodic_task(), radio_control_script_step_pitch(), radio_control_script_step_roll(), radio_control_script_step_yaw(), rand_gaussian(), rand_uniform(), range_forcefield_init(), range_forcefield_periodic(), range_forcefield_update(), range_msg_callback(), range_sensor_uavcan_cb(), range_sensor_uavcan_init(), range_sensor_uavcan_send_lidar(), RANSAC_linear_model(), rc_cb(), rc_cb(), rc_cb(), rc_cb(), rc_cb(), rc_cb(), rc_datalink_event(), rc_datalink_normalize(), rc_datalink_parse_RC_UP(), rc_intermcu_parse_fbw_status(), rc_intermcu_parse_msg(), rc_mode_switch(), rc_settings(), rc_uavcan_cb(), rc_uavcan_event(), rc_uavcan_init(), rccEnableAndReset(), RdByte(), RdMulti(), read_file(), read_into_buffer(), read_rc_setpoint_heading(), read_rc_setpoint_speed_i(), read_reg(), read_reg(), read_var(), readPCAP01_SRAM(), reassemble_uint20(), received_spektrum_soft_bind(), recover_gps_data(), recursive_least_squares(), recursive_least_squares_batch(), refine_single_corner(), register_periodic_telemetry(), reinit_all_cf(), reinit_cf2(), reinit_cf4(), relative_localization_filter_init(), relative_localization_filter_periodic(), relpos_cb(), removeEmptyLogs(), renorm_factor(), request_for_msg(), request_node_info(), simple_quad_sim.BulletFDM::reset(), reset_butterworth_2_complementary_array(), reset_butterworth_2_low_pass_array(), reset_butterworth_4_complementary_array(), reset_butterworth_4_low_pass_array(), reset_cb(), reset_cb(), reset_cb(), reset_cb(), reset_cb(), reset_cb(), reset_cb(), reset_cb(), reset_cb(), reset_first_order_complementary_array(), reset_first_order_low_pass_array(), reset_first_order_zoh_low_pass_array(), reset_guidance_reference_from_current_position(), reset_horizontal_vars(), reset_quat_second_order_low_pass(), reset_ref(), reset_ref(), reset_ref(), reset_ref(), reset_ref(), reset_ref(), reset_speeds(), reset_state(), reset_transport_delay(), reset_transport_delay_array(), reset_vertical_ref(), reset_vertical_ref(), reset_vertical_ref(), reset_vertical_ref(), reset_vertical_ref(), reset_vertical_ref(), reshape_wind(), gaia.Ui_Dialog::retranslateUi(), Gaia_template.Ui_Dialog::retranslateUi(), AngleSelector.Ui_Form::retranslateUi(), betterHSlider_ui.Ui_Form::retranslateUi(), betterVSlider_ui.Ui_Form::retranslateUi(), ring_buffer_available(), ring_buffer_free_space(), ring_buffer_init(), ring_buffer_read(), ring_buffer_write(), rm3100_event(), rm3100_get_raw_from_buf(), rm3100_init(), rm_1st_pos(), rm_2nd(), rm_2nd_pos(), rm_3rd(), rm_3rd_attitude(), rm_3rd_head(), rm_3rd_pos(), rng_get(), rng_wait_and_get(), RotateAndTranslateToWorld(), RotateAndTranslateToWorld(), RotateAndTranslateToWorld(), rotorcraft_cam_init(), rotorcraft_cam_periodic(), rotorcraft_cam_set_mode(), rotwing_state_choose_circle_direction(), rotwing_state_choose_state_by_dist(), rotwing_state_feedback_cb(), rotwing_state_hover_motors_idling(), rotwing_state_hover_motors_running(), rotwing_state_init(), rotwing_state_periodic(), rotwing_state_skew_angle_valid(), rover_guidance_enter(), rover_guidance_init(), rover_guidance_periodic(), rover_guidance_run(), rover_guidance_steering_heading_ctrl(), rover_guidance_steering_init(), rover_guidance_steering_periodic(), rover_guidance_steering_setpoints(), rover_holo_guidance_enter(), rover_holo_guidance_init(), rover_holo_guidance_periodic(), rover_holo_guidance_run(), rpm_cb(), rpm_sensor_get_rpm(), rpm_sensor_init(), rpm_sensor_periodic(), rpm_sensor_send_motor(), rssi_cb(), rssi_init(), rtcm3_process(), rtcm3_register_callback(), RTCMgetbits(), RTCMgetbitu(), RTCMgetbitu(), rtos_mon_init_arch(), rtos_mon_periodic_arch(), rtp_frame_send(), rtp_frame_test(), rtp_packet_send(), run_avoid_navigation_onvision(), run_logger(), run_memory_management(), runge_kutta_1_float(), runge_kutta_2_float(), runge_kutta_4_float(), RungeKutta(), rxInit(), rxSpiCheckBindRequested(), rxSpiInit(), rxSpiLedBlink(), rxSpiLedBlinkRxLoss(), rxSpiReadCommand(), rxSpiReadCommandMulti(), rxSpiReadRawRC(), rxSpiSetProtocol(), rxSpiWriteByte(), rxSpiWriteCommandMulti(), s_measure(), s_read_byte(), s_read_measure(), s_read_statusreg(), s_start_measure(), s_write_statusreg(), samples_from_odr(), samples_from_odr(), save_image_color(), save_image_gray(), save_image_HM(), save_shot_on_disk(), save_speeds(), save_texton_dictionary(), save_texton_distribution(), save_weights(), SBM_OCV(), sbp_dops_callback(), sbp_gps_time_callback(), sbp_pos_ecef_callback(), sbp_pos_llh_callback(), sbp_tracking_state_callback(), sbp_tracking_state_dep_a_callback(), sbp_vel_ecef_callback(), sbp_vel_ned_callback(), sbus_common_decode_event(), sbus_common_init(), sbus_decode_event(), sbus_dual_decode_event(), sbus_dual_event(), sbus_dual_init(), sbus_event(), sbus_init(), schdule_control_effectiveness(), sdcard_spi_init(), sdcard_spi_multiwrite_next(), sdcard_spi_multiwrite_start(), sdcard_spi_multiwrite_stop(), sdcard_spi_periodic(), sdcard_spi_read_block(), sdcard_spi_request_bytes(), sdcard_spi_send_app_cmd(), sdcard_spi_send_cmd(), sdcard_spi_spicallback(), sdcard_spi_write_block(), sdio_connect(), sdio_disconnect(), sdlog_check_free_space(), sdlog_chibios_finish(), sdlog_chibios_init(), sdlog_send(), sdlog_transmit(), sdlog_transmit_buffer(), sdLogFinish(), sdlogger_spi_direct_char_available(), sdlogger_spi_direct_command(), sdlogger_spi_direct_get_byte(), sdlogger_spi_direct_index_received(), sdlogger_spi_direct_init(), sdlogger_spi_direct_periodic(), sdlogger_spi_direct_send_message(), sdLogInit(), sdp3x_crc(), sdp3x_downlink(), sdp3x_event(), sdp3x_init(), sdp3x_periodic(), segment_length(), Send(), send_accel(), send_accel(), send_accel_raw(), send_accel_scaled(), send_accel_scaled(), send_acinfo_lla(), send_actuators(), send_ahrs_bias(), send_ahrs_bias(), send_ahrs_quat(), send_ahrs_ref_quat(), send_ahrs_ref_quat(), send_ahrs_ref_quat(), send_ahrs_ref_quat(), send_air_data(), send_airspeed(), send_airspeed_wind_ekf(), send_airspeed_wind_ekf_debug(), send_aligner(), send_alive(), send_alive(), send_amsl(), send_anchor_data(), send_aoa(), send_aoa(), send_approach_moving_target(), Send_AT(), send_att(), send_att(), send_att(), send_att(), send_att(), send_att(), send_att(), send_att_full_indi(), send_att_indi(), send_att_ref(), send_att_ref(), send_att_ref(), send_att_ref(), send_attitude(), send_autopilot_version(), send_autopilot_version(), send_baro_bmp_data(), send_baro_raw(), send_batmon(), send_bebop_actuators(), send_bias(), send_bias(), send_bias(), send_bias(), send_body_rates_accel(), send_buffer_to_memory(), send_buffer_to_uart(), send_calibration(), send_calibration(), send_cam(), send_cam(), send_cc2500_ppm(), send_chirp(), send_circle(), send_cloud_sensor_data(), Send_CMGF(), Send_CNMI(), send_commands(), send_commands(), Send_CPMS(), Send_CSQ(), send_ctc(), send_ctc_control(), send_ctl_a(), send_data(), send_dcf(), send_desired(), send_detect_gate_visual_position(), send_divergence(), send_dl_value(), send_doublet(), send_downlink(), send_dragspeed(), send_eff_mat_g_indi(), send_eff_mat_g_indi_simple(), send_eff_mat_guid_indi_hybrid(), send_eff_mat_guid_oneloop_andi(), send_eff_mat_stab_oneloop_andi(), send_eff_mat_stabilization_andi(), send_energy(), send_estimator(), send_euler(), send_euler(), send_euler(), send_euler(), send_euler(), send_euler(), send_euler_int(), send_external_pose_down(), send_external_pose_down(), send_fbw_status(), send_fbw_status(), send_filter_status(), send_filter_status(), send_filter_status(), send_filter_status(), send_filter_status(), send_filter_status(), send_filter_status(), send_filter_status(), send_filter_status(), send_filter_status(), send_filter_status(), send_fp(), send_fp_min(), send_geo_mag(), send_geo_mag(), send_geo_mag(), send_geo_mag(), send_geo_mag(), send_gh(), send_gps(), send_gps_int(), send_gps_lla(), send_gps_relpos(), send_gps_sol(), send_grid_init(), send_ground_detect(), send_guidance_indi_hybrid(), send_guidance_oneloop_andi(), send_gvf(), send_gvf(), send_gvf_parametric(), send_gyro(), send_gyro(), send_gyro_raw(), send_gyro_scaled(), send_gyro_scaled(), send_hff(), send_hff_debug(), send_hott(), send_hover_loop(), send_href(), send_hybrid_guidance(), send_imu_heater(), send_indi_guidance(), send_ins(), send_ins(), send_ins(), send_ins(), send_ins(), send_ins(), send_ins_ekf2(), send_ins_ekf2_ext(), send_ins_flow(), send_ins_ref(), send_ins_ref(), send_ins_ref(), send_ins_ref(), send_ins_ref(), send_ins_ref(), send_ins_ref(), send_ins_z(), send_ins_z(), send_ins_z(), send_ins_z(), send_ins_z(), send_inv_filter(), send_inv_filter(), send_jevois_mavlink_visual_position(), send_jevois_mavlink_visual_target(), send_mag(), send_mag_current(), send_mag_heading(), send_mag_raw(), send_mag_scaled(), send_message(), send_message(), send_minimal_com(), send_mission_status(), send_mode(), send_motor_mixing(), send_msg_image_buffer(), send_msg_status(), send_nav_ref(), send_nav_status(), send_nav_status(), send_navdata(), send_obstacle_grid(), send_oneloop_andi(), send_oneloop_debug(), send_optical_flow_hover(), send_parachute(), send_piksi_heartbeat(), send_ppm(), send_quat(), send_quat(), send_rate(), send_rate(), send_rc(), send_relative_localization_data(), send_rotating_wing_state(), send_rotorcraft_rc(), send_sbus(), send_sbus(), send_sdlog_status(), send_secure_link_info(), send_segment(), send_servo_cmd(), send_spektrum_bind(), send_stab_attitude_stabilization_andi(), send_status(), send_status(), send_superbit(), send_survey(), send_survey(), send_svinfo_available(), send_svinfo_id(), send_swarm_message(), send_target_pos_info(), send_theta_to_nei(), send_thumbnails(), send_tune_hover(), send_tune_roll(), send_tune_vert(), send_uart_err(), send_uartx_err(), send_vert_loop(), send_vff(), send_vffe(), send_vn_info(), send_vn_info(), send_vn_info(), send_wave(), send_wind(), send_wind(), send_wind_estimator(), send_wind_info(), send_wind_info_ret(), send_windtunnel_meas(), send_wls_u(), send_wls_u_stabilization_andi(), send_wls_v(), send_wls_v_stabilization_andi(), send_wp_moved(), send_wp_moved(), sendFloat(), sensors_hitl_event(), sensors_hitl_init(), sensors_hitl_parse_HITL_AIR_DATA(), sensors_hitl_parse_HITL_GPS(), sensors_hitl_parse_HITL_IMU(), sensors_hitl_periodic(), seq_in_array(), serial_init(), serial_init(), serial_port_close(), serial_port_flush(), serial_port_flush_output(), serial_port_free(), serial_port_new(), serial_port_open(), serial_port_open_raw(), serial_port_set_baudrate(), serial_port_set_bits_stop_parity(), serial_update(), serialPrint(), servo_cam_ctrl_periodic(), servo_tester_init(), servo_tester_periodic(), set_ac_info_lla(), set_ac_info_utm(), set_body_orientation_and_rates(), set_body_state_from_quat(), set_body_state_from_quat(), set_body_state_from_quat(), set_color_yuv422(), set_cov_div(), set_cov_div(), set_cov_flow(), set_current_chirp_values(), set_dcm_matrix_from_rmat(), set_exception_flag(), set_gains_pi_d_df(), set_gains_pid_df(), set_gains_pid_f(), set_gainset(), set_gate_points(), set_integral_pid_f(), set_nav_block(), set_nice_level(), set_output_image_size(), set_rotorcraft_commands(), set_rssi(), set_state(), set_state_from_ins(), setAnglesMeasurements(), setCrc4(), betterAbstractSlider.BetterAbstractSlider::setDecimals(), setDshotPacketTlm(), setFromEperiod(), setLidarDistance_f(), setNodeStatesFalse(), betterAbstractSlider.BetterAbstractSlider::setRange(), setRssi(), setRssiDirect(), AngleSelector.AngleSelector::setText(), settings_idx_from_param_id(), settings_init(), settings_parse_msg_GET_SETTING(), settings_parse_msg_SETTING(), settings_store(), gaia.GaiaWindow::setUpdateInterval(), gaia.Ui_Dialog::setupUi(), Gaia_template.Ui_Dialog::setupUi(), AngleSelector.Ui_Form::setupUi(), betterHSlider_ui.Ui_Form::setupUi(), betterVSlider_ui.Ui_Form::setupUi(), betterAbstractSlider.BetterAbstractSlider::setValue(), AngleSelector.AngleSelector::setValue(), shell_add_entry(), shell_init_arch(), shellCreateStatic(), shellInit(), shift_tracking_init(), shift_tracking_run(), shouldAcceptTransfer(), show_image_data(), show_image_entry(), show_rotation_matrix(), sht_read_serial(), mesonh.mesonh::signal_handler(), signed_cpu_ticks_of_usec(), sim_overwrite_ahrs(), sim_overwrite_ins(), sim_overwrite_lidar(), simple_kinematic_kalman_init(), simple_kinematic_kalman_predict(), simple_kinematic_kalman_update(), simple_kinematic_kalman_update_noise(), simple_kinematic_kalman_update_pos(), simple_kinematic_kalman_update_speed(), sirf_parse_2(), sirf_parse_41(), sirf_parse_char(), sirf_parse_msg(), skew_sym(), slcan_can_rx_cb(), slcan_handle_cmd(), slcan_handle_frame(), slcan_init(), smartPortDataReceive(), smartPortDownlink_cb(), smchsnprintf(), smchvsnprintf(), snake_gate_detection(), snake_left_and_right(), snake_up_and_down(), snav_circle1(), snav_circle2(), snav_init(), snav_on_time(), snav_route(), sobel_OCV(), socket_init(), socket_recv(), socket_send(), softi2c_device_event(), softi2c_event(), softi2c_process_transaction(), softi2c_read_bit(), softi2c_read_byte(), softi2c_setup_gpio(), softi2c_submit(), softi2c_write_bit(), softi2c_write_byte(), sonar_adc_init(), sonar_adc_periodic(), sonar_adc_report(), sonar_adc_send_sonar(), sonar_bebop_event(), sonar_bebop_init(), sonar_bebop_read(), sonar_i2c_init(), sonar_i2c_periodic(), sonar_i2c_report(), sonar_i2c_send_sonar(), sonar_pwm_read(), sonar_vl53l1x_event(), sonar_vl53l1x_init(), sonar_vl53l1x_publish(), sonar_vl53l1x_read(), spektrum_event(), spektrum_init_sat(), spektrum_parse_channel(), spektrum_parser(), spektrum_uart_check(), spi0_arch_init(), spi1_arch_init(), spi2_arch_init(), spi_blocking_transceive(), spi_init_slaves(), spi_lock(), spi_resolve_CR1(), spi_resolve_CR2(), spi_resolve_slave_pin(), spi_resolve_slave_port(), spi_resume(), spi_slave_select(), spi_slave_unselect(), spi_submit(), split(), srf08_event(), srf08_read_register(), sst25vfxxxx_init(), sst25vfxxxx_read(), sst25vfxxxx_write(), stab_sp_rotate_f(), stab_sp_rotate_i(), stabilization_andi_init(), stabilization_andi_run(), stabilization_attitude_enter(), stabilization_attitude_euler_float_init(), stabilization_attitude_euler_int_init(), stabilization_attitude_get_heading_f(), stabilization_attitude_get_heading_i(), stabilization_attitude_heli_indi_init(), stabilization_attitude_heli_indi_set_steadystate_pitchroll(), stabilization_attitude_plane_pid_init(), stabilization_attitude_plane_pid_run(), stabilization_attitude_quat_float_init(), stabilization_attitude_quat_int_init(), stabilization_attitude_read_rc(), stabilization_attitude_read_rc_roll_pitch_earth_quat_f(), stabilization_attitude_read_rc_roll_pitch_quat_f(), stabilization_attitude_read_rc_setpoint(), stabilization_attitude_read_rc_setpoint_earth_bound(), stabilization_attitude_read_rc_setpoint_eulers(), stabilization_attitude_read_rc_setpoint_eulers_f(), stabilization_attitude_run(), stabilization_attitude_run(), stabilization_attitude_run(), stabilization_direct_run(), stabilization_filter_commands(), stabilization_get_failsafe_sp(), stabilization_indi_attitude_controller(), stabilization_indi_attitude_run(), stabilization_indi_enter(), stabilization_indi_init(), stabilization_indi_rate_controller(), stabilization_indi_rate_run(), stabilization_indi_set_wls_settings(), stabilization_indi_simple_reset_r_filter_cutoff(), stabilization_indi_update_filt_freq(), stabilization_init(), stabilization_mode_changed(), stabilization_opticflow_vel_cb(), stabilization_rate_init(), stabilization_rate_read_rc(), stabilization_rate_run(), start_formation(), start_new_log(), start_video_thread(), startCapture(), stat_tlsf_walker(), state2stereocam(), stateCalcAccelEcef_f(), stateCalcAccelEcef_i(), stateCalcAccelNed_f(), stateCalcAccelNed_i(), stateCalcAirspeed_f(), stateCalcAirspeed_i(), stateCalcBodyRates_f(), stateCalcBodyRates_i(), stateCalcHorizontalSpeedDir_f(), stateCalcHorizontalSpeedDir_i(), stateCalcHorizontalSpeedNorm_f(), stateCalcHorizontalSpeedNorm_i(), stateCalcHorizontalWindspeed_f(), stateCalcHorizontalWindspeed_i(), stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateCalcSpeedEcef_f(), stateCalcSpeedEcef_i(), stateCalcSpeedEnu_f(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_f(), stateCalcSpeedNed_i(), stateCalcVerticalWindspeed_f(), stateCalcVerticalWindspeed_i(), stateGetAccelEcef_f(), stateGetAccelEcef_i(), stateGetAccelNed_f(), stateGetAccelNed_i(), stateGetAirspeed_f(), stateGetAirspeed_i(), stateGetBodyRates_f(), stateGetBodyRates_i(), stateGetEcefOrigin_f(), stateGetEcefOrigin_i(), stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedDir_i(), stateGetHorizontalSpeedNorm_f(), stateGetHorizontalSpeedNorm_i(), stateGetHorizontalWindspeed_f(), stateGetHorizontalWindspeed_i(), stateGetLlaOrigin_i(), stateGetNedOrigin_f(), stateGetNedOrigin_i(), stateGetPositionEcef_f(), stateGetPositionEcef_i(), stateGetPositionEnu_f(), stateGetPositionEnu_i(), stateGetPositionLla_f(), stateGetPositionLla_i(), stateGetPositionNed_f(), stateGetPositionNed_i(), stateGetPositionUtm_f(), stateGetSpeedEcef_f(), stateGetSpeedEcef_i(), stateGetSpeedEnu_f(), stateGetSpeedEnu_i(), stateGetSpeedNed_f(), stateGetSpeedNed_i(), stateGetUtmOrigin_f(), stateGetVerticalWindspeed_f(), stateGetVerticalWindspeed_i(), stateGetWindspeed_f(), stateGetWindspeed_i(), stateInit(), stateSetAccelEcef_f(), stateSetAccelEcef_i(), stateSetAccelNed_f(), stateSetAccelNed_i(), stateSetAirspeed_f(), stateSetAirspeed_i(), stateSetAngleOfAttack_f(), stateSetHorizontalWindspeed_f(), stateSetHorizontalWindspeed_i(), stateSetInputFilter(), stateSetLocalOrigin_i(), stateSetLocalUtmOrigin_f(), stateSetNedToBodyEulers_f(), stateSetNedToBodyEulers_i(), stateSetNedToBodyQuat_f(), stateSetNedToBodyQuat_i(), stateSetNedToBodyRMat_f(), stateSetNedToBodyRMat_i(), stateSetPosition_f(), stateSetPosition_i(), stateSetPositionEnu_f(), stateSetPositionEnu_i(), stateSetPositionNed_f(), stateSetPositionNed_i(), stateSetSideslip_f(), stateSetSpeed_f(), stateSetSpeed_i(), stateSetSpeedEcef_f(), stateSetSpeedEcef_i(), stateSetSpeedEnu_f(), stateSetSpeedEnu_i(), stateSetSpeedNed_f(), stateSetSpeedNed_i(), stateSetVerticalWindspeed_f(), stateSetVerticalWindspeed_i(), simple_quad_sim.BulletFDM::step(), step_adaptation(), simple_quad_sim.BulletFDM::step_debug(), stereo_avoid_run(), stereocam_droplet_periodic(), stereocam_event(), stereocam_init(), stereocam_parse_msg(), stm32_gpio_init(), stop_formation(), stop_video_thread(), stopCapture(), store_min_dist(), sts3032_enable_torque(), sts3032_event(), sts3032_set_id(), sts3032_set_response_level(), stub(), sum_EFF_MAT_RW(), sum_f(), sum_g1_g2(), superbitrf_check_free_space(), superbitrf_dl_init(), superbitrf_event(), superbitrf_gen_dsmx_channels(), superbitrf_init(), superbitrf_radio_to_channels(), superbitrf_rc_event(), superbitrf_rc_normalize(), superbitrf_receive_packet_cb(), Suppr_SMS(), SwapBuffer(), swashplate_mixing_run(), sys_id_chirp_activate_handler(), sys_id_chirp_add_values(), sys_id_chirp_axis_handler(), sys_id_chirp_exponential_activate_handler(), sys_id_chirp_fstart_handler(), sys_id_chirp_fstop_handler(), sys_id_chirp_init(), sys_id_chirp_run(), sys_id_doublet_activate_handler(), sys_id_doublet_add_values(), sys_id_doublet_axis_handler(), sys_id_doublet_init(), sys_id_doublet_run(), sys_id_wave_activate_handler(), sys_id_wave_add_values(), sys_id_wave_axis_handler(), sys_id_wave_frequency_hz_set(), sys_id_wave_init(), sys_id_wave_lag_rad_set(), sys_tick_handler(), sys_time_arch_init(), sys_time_cancel_timer(), sys_time_init(), sys_time_msleep(), sys_time_thread_main(), sys_time_ticks_of_msec(), sys_time_ticks_of_sec(), sys_time_ticks_of_usec(), sys_time_usleep(), syslink_check_free_space(), syslink_compute_cksum(), syslink_dl_event(), syslink_dl_init(), syslink_dl_periodic(), syslink_getch(), syslink_put_buffer(), tag_tracking_compute_speed(), tag_tracking_get_heading(), tag_tracking_init(), tag_tracking_parse_target_pos(), tag_tracking_propagate(), tag_tracking_report(), tag_tracking_set_kp(), tag_tracking_set_kpz(), tag_tracking_set_motion_type(), tag_tracking_set_predict_time(), tag_tracking_set_setting_id(), takeoff_detect_periodic(), target_get_pos(), target_get_vel(), target_localization_init(), target_localization_report(), target_parse_target_pos(), target_pos_init(), target_pos_set_current_offset(), tas_from_eas(), tcas_init(), tcas_periodic_task_1Hz(), tcas_periodic_task_4Hz(), tcas_test_direction(), telemetry_reporting_task(), telemetryIsSensorEnabled(), temod_event(), temod_init(), temp_adc_downlink(), temp_adc_init(), temp_adc_periodic(), temp_tcouple_adc_periodic(), teraranger_downlink(), teraranger_event(), teraranger_periodic(), terminal_backspace(), terminal_move_cursor(), terminal_newline(), terminal_print_line(), terminal_reset_cursor(), test_thd(), texton_func(), textons_init(), tfmini_i2c_downlink(), tfmini_i2c_init(), tfmini_i2c_periodic(), tfmini_i2c_send_lidar(), tfmini_init(), tfmini_parse(), tfmini_send_abi(), tfmini_send_lidar(), tfmini_send_lidar(), th_sp_from_incr_f(), th_sp_from_incr_i(), th_sp_from_incr_vect_f(), th_sp_from_incr_vect_i(), th_sp_from_thrust_f(), th_sp_from_thrust_i(), th_sp_to_incr_f(), th_sp_to_incr_i(), th_sp_to_thrust_f(), th_sp_to_thrust_i(), thd_ap(), THD_FUNCTION(), thd_lidar_vl53l5cx(), thd_spi(), thd_startlog(), thd_sys_tick(), thd_test_init(), thd_test_periodic(), thd_test_syracuse_restart(), thd_windestimate(), thdUsbStorage(), thresholding_img(), throttle_curve_init(), throttle_curve_run(), throttle_curve_send_telem(), time_to_double(), timerDmaCache_cache(), timerDmaCache_restore(), timeval_diff(), timIcObjectInit(), timIcRccDisable(), timIcRccEnable(), timIcStart(), timIcStartCapture(), timIcStop(), timIcStopCapture(), tlsf_check_r(), tlsf_free_r(), tlsf_init_heaps(), tlsf_malloc_r(), tlsf_memalign_r(), tlsf_realloc_r(), tlsf_stat_r(), tmp102_event(), to_global_pprz_eulers(), to_pprz_body(), to_pprz_ecef(), to_pprz_lla(), to_pprz_ltp(), to_pprz_ned(), to_pprz_rates(), traffic_info_init(), traffic_info_log_start(), transfer(), transform_illuminance_image(), transition_run(), transition_run(), TranslateAndRotateFromWorld(), TranslateAndRotateFromWorld(), TranslateAndRotateFromWorld(), TranslateAndRotateFromWorld(), trilateration_compute(), trilateration_init(), TRNGClearErrors(), TRNGGet(), TRNGGetErrors(), TRNGStart(), TRNGStop(), tstp_hdl(), tuneRx(), tunnel_event(), tunnel_uavcan_cb(), tunnel_uavcan_char_available(), tunnel_uavcan_check_free_space(), tunnel_uavcan_init_periph(), tunnel_uavcan_send_message(), turn_cmd_to_msg(), u16bit_to_str(), uart_arch_init(), uart_char_available(), uart_check_free_space(), uart_getch(), uart_periph_init(), uart_periph_open(), uart_periph_set_baudrate(), uart_periph_set_bits_stop_parity(), uart_put_byte(), uart_receive_handler(), uart_speed(), uart_speed(), uart_thread(), uav_recovery_init(), uav_recovery_periodic(), uavcan_allocator_init(), uavcan_broadcast(), uavcan_get_node_id_mapping(), uavcan_init(), uavcan_init_reporting(), uavcan_reporting(), uavcan_request(), uavcan_response(), uavcan_transfer(), uavcan_tx(), uavcanInitIface(), ubx_header(), ubx_process(), ubx_send_cfg_rst(), udp_arch_init(), udp_arch_periph_init(), udp_char_available(), udp_getch(), udp_periph_init(), udp_put_buffer(), udp_receive(), udp_send_message(), udp_send_raw(), udp_socket_create(), udp_socket_recv(), udp_socket_recv_dontwait(), udp_socket_send(), udp_socket_send_dontwait(), udp_socket_set_recvbuf(), udp_socket_set_sendbuf(), udp_socket_subscribe_multicast(), udp_thread(), uiGetIndexOfLogFile(), uint16_from_buf(), UKF_Wind_Estimator_step(), undistort_image_func(), undistort_image_init(), unique_id_identical(), unwrap_LUT(), update_1e_filter(), update_1e_filter_at_time(), update_ae_awb(), update_ahrs_from_sim(), update_alt_conf(), update_attitude(), update_barycenter(), update_biased_z_conf(), update_butterworth_2_complementary(), update_butterworth_2_complementary_array(), update_butterworth_2_complementary_rates(), update_butterworth_2_complementary_vect3(), update_butterworth_2_low_pass_array(), update_butterworth_4_complementary(), update_butterworth_4_complementary_array(), update_butterworth_4_complementary_rates(), update_butterworth_4_complementary_vect3(), update_butterworth_4_low_pass(), update_butterworth_4_low_pass_array(), update_butterworth_4_low_pass_int(), update_cell(), update_errors(), update_first_order_complementary(), update_first_order_complementary_array(), update_first_order_complementary_rates(), update_first_order_complementary_vect3(), update_first_order_low_pass_array(), update_first_order_low_pass_tau(), update_first_order_zoh_low_pass_array(), update_first_order_zoh_low_pass_tau(), update_geoid_height(), update_line_bayes(), update_LUT(), update_median_filter_f(), update_median_filter_i(), update_obs_height(), update_pi_d_df(), update_pid_f(), update_quat_second_order_low_pass(), update_second_order_complementary(), update_state(), update_state_heading(), update_state_interface(), update_state_interface(), update_tag_position(), update_target_point(), update_target_point(), update_transport_delay(), update_transport_delay_array(), update_vz_conf(), update_vz_conf(), update_waypoint(), update_wp(), update_z_conf(), updateCrc8(), gaia.GaiaWindow::updateInterval(), updateRssiSamples(), UpdateSensorLatency(), UpdateSensorLatency_Single(), updateSlot(), usage(), usbEvent(), usbStorage_enable_usb_storage(), usbStorageStartPolling(), usbStorageStop(), usbStorageWaitForDeconnexion(), utm_float_from_gps(), utm_int_from_gps(), utm_of_lla_d(), utm_of_lla_f(), utm_of_lla_i(), uwb_positioning_init(), uwb_positioning_periodic(), uwb_positioning_range_periodic(), uwb_positioning_report(), uwb_positioning_reset_heading_ref(), uwb_ranging_cb(), uyvy_opencv_to_yuv_opencv(), UYVYs_interlacing_H(), UYVYs_interlacing_V(), v4l2_capture_thread(), v4l2_close(), v4l2_image_free(), v4l2_image_get(), v4l2_image_get_nonblock(), v4l2_init(), v4l2_init_subdev(), v4l2_start_capture(), v4l2_stop_capture(), v_ctl_altitude_loop(), v_ctl_climb_auto_throttle_loop(), v_ctl_climb_loop(), v_ctl_guidance_loop(), v_ctl_init(), v_ctl_landing_loop(), v_ctl_set_pitch(), v_ctl_set_throttle(), v_ctl_throttle_slew(), Va_to_Vb(), AngleSelector.AngleSelector::value(), variance_f(), variance_i(), Vb_to_Va(), Vc_to_Vw(), vect_bound_nd(), Vector_Add(), Vector_Cross_Product(), Vector_Dot_Product(), Vector_Scale(), vel_est_cb(), vel_sp_cb(), verify_chk(), vertical_ctrl_module_init(), vertical_ctrl_module_run(), vertical_ctrl_module_run(), vertical_ctrl_module_run(), vertical_ctrl_optical_flow_cb(), vff_init(), vff_init(), vff_propagate(), vff_update_vz_conf(), Vi_to_Vc(), Vi_to_Vc16bit(), Vi_to_Vc_depth(), video_capture_func(), video_capture_init(), video_capture_save(), video_thread_function(), video_thread_init(), video_thread_start(), video_thread_stop(), video_usb_logger_start(), video_usb_logger_stop(), viewing_angle(), viewvideo_function(), viewvideo_init(), virt2phys(), VL53L1_NonBlocking_ReadMulti(), VL53L1_NonBlocking_WriteMulti(), VL53L1_RdDWord(), VL53L1_RdWord(), VL53L1_ReadMulti(), VL53L1_WrDWord(), VL53L1_WriteMulti(), VL53L1_WrWord(), VL53L1X_BootDevice(), VL53L1X_BootState(), VL53L1X_CheckForDataReady(), VL53L1X_GetAmbientPerSpad(), VL53L1X_GetAmbientRate(), VL53L1X_GetDistance(), VL53L1X_GetDistanceMode(), VL53L1X_GetDistanceThresholdHigh(), VL53L1X_GetDistanceThresholdLow(), VL53L1X_GetDistanceThresholdWindow(), VL53L1X_GetInterMeasurementInMs(), VL53L1X_GetInterruptPolarity(), VL53L1X_GetRangeStatus(), VL53L1X_GetResult(), VL53L1X_GetROI_XY(), VL53L1X_GetROICenter(), VL53L1X_GetSensorId(), VL53L1X_GetSigmaThreshold(), VL53L1X_GetSignalPerSpad(), VL53L1X_GetSignalRate(), VL53L1X_GetSignalThreshold(), VL53L1X_GetSpadNb(), VL53L1X_GetSWVersion(), VL53L1X_GetTimingBudgetInMs(), VL53L1X_GetXtalk(), VL53L1X_NonBlocking_CheckForDataReady(), VL53L1X_NonBlocking_GetDistance(), VL53L1X_NonBlocking_GetRangeStatus(), VL53L1X_NonBlocking_ReadDataEvent(), VL53L1X_SensorInit(), VL53L1X_SetDistanceMode(), VL53L1X_SetDistanceThreshold(), VL53L1X_SetI2CAddress(), VL53L1X_SetInterMeasurementInMs(), VL53L1X_SetInterruptPolarity(), VL53L1X_SetOffset(), VL53L1X_SetROI(), VL53L1X_SetROICenter(), VL53L1X_SetSigmaThreshold(), VL53L1X_SetSignalThreshold(), VL53L1X_SetTimingBudgetInMs(), VL53L1X_SetXtalk(), VL53L1X_StartTemperatureUpdate(), vl53l5cx_check_data_ready(), vl53l5cx_dci_read_data(), vl53l5cx_dci_replace_data(), vl53l5cx_dci_write_data(), vl53l5cx_disable_internal_cp(), vl53l5cx_enable_internal_cp(), vl53l5cx_get_integration_time_ms(), vl53l5cx_get_power_mode(), vl53l5cx_get_ranging_data(), vl53l5cx_get_ranging_frequency_hz(), vl53l5cx_get_ranging_mode(), vl53l5cx_get_resolution(), vl53l5cx_get_sharpener_percent(), vl53l5cx_get_target_order(), vl53l5cx_init(), vl53l5cx_is_alive(), vl53l5cx_set_i2c_address(), vl53l5cx_set_integration_time_ms(), vl53l5cx_set_power_mode(), vl53l5cx_set_ranging_frequency_hz(), vl53l5cx_set_ranging_mode(), vl53l5cx_set_resolution(), vl53l5cx_set_sharpener_percent(), vl53l5cx_set_target_order(), vl53l5cx_start_ranging(), vl53l5cx_stop_ranging(), vMultiplyMatrixByVector(), vn100_event_task(), vn100_report_task(), vn200_event(), vn200_parse(), vn200_read_buffer(), vn200_read_message(), vn200_yaw_pitch_roll_to_attitude(), vSubtractVectors(), Vw_to_Vc(), w5100_close_socket(), w5100_event(), w5100_get(), w5100_init(), w5100_read(), w5100_read_buffer(), w5100_read_data(), w5100_receive(), w5100_rx_size(), w5100_send(), w5100_set(), w5100_set_buffer(), w5100_sock_get(), w5100_sock_get16(), w5100_sock_set(), w_approx(), wait_for_cmd(), wait_for_img(), WaitMs(), wave_init(), wave_is_running(), wave_reset(), wave_update(), waypoint_clear_global_flag(), waypoint_copy(), waypoint_get_enu_f(), waypoint_get_enu_i(), waypoint_get_lat_deg(), waypoint_get_lat_rad(), waypoint_get_lla(), waypoint_get_lon_deg(), waypoint_get_lon_rad(), waypoint_globalize(), waypoint_is_global(), waypoint_localize(), waypoint_move_enu_i(), waypoint_move_here_2d(), waypoint_move_lla(), waypoint_move_xy_i(), waypoint_position_copy(), waypoint_set_enu(), waypoint_set_enu_i(), waypoint_set_global_flag(), waypoint_set_latlon(), waypoint_set_lla(), waypoints_init(), wedgebug_init(), wedgebug_periodic(), wgs84_ellipsoid_to_geoid_f(), wgs84_ellipsoid_to_geoid_i(), wind_estimation_quadrotor_init(), wind_estimation_quadrotor_periodic(), wind_estimation_quadrotor_report(), wind_estimation_quadrotor_stop(), wind_estimator_event(), wind_estimator_init(), wind_estimator_periodic(), wind_estimator_Set_Q_VA(), wind_estimator_Set_Q_VA_SCALE(), wind_estimator_Set_Q_WIND(), wind_estimator_Set_R_AOA(), wind_estimator_Set_R_GS(), wind_estimator_Set_R_SSA(), wind_estimator_Set_R_VA(), wind_estimator_step(), wind_gfi_event(), windturbine_periodic(), wing_position_cb(), wing_position_cb(), wing_rotation_adc_to_deg(), wls_alloc(), mesonh.mesonh::worldenv_cb(), write_buf(), write_exif_jpeg(), write_file(), write_reg(), write_reg(), write_sysfs_int(), write_var(), writePCAP01_SRAM(), WrMulti(), xbee_dl_event(), xbee_dl_init(), xgeqrf(), xgeqrf_f(), xnrm2(), xnrm2_f(), xsens700_periodic(), xsens_ask_message_rate(), xsens_parser_event(), xsens_parser_func(), xsens_periodic(), xtend_rssi_periodic(), and yuv_opencv_to_yuv422().