|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
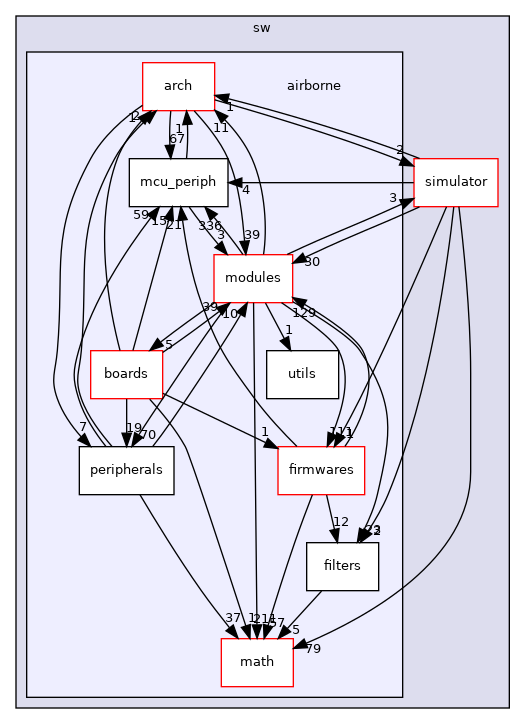
 Directory dependency graph for airborne:
Directory dependency graph for airborne:Directories | |
| arch | |
| boards | |
| filters | |
| firmwares | |
| math | |
| mcu_periph | |
| modules | |
| peripherals | |
| utils | |
Files | |
| autopilot.c | |
| Core autopilot interface common to all firmwares. | |
| autopilot.h | |
| Core autopilot interface common to all firmwares. | |
| c++.cpp | |
| led.h | |
| arch independent LED (Light Emitting Diodes) API | |
| main_ap.c | |
| Autopilot main loop. | |
| main_ap.h | |
| Autopilot main loop. | |
| main_bare.c | |
| Program main function with baremetal inplementation (no RTOS) | |
| main_bare.h | |
| main_chibios.c | |
| Program main function for ChibiOS inplementation. | |
| main_chibios.h | |
| main_fbw.c | |
| FBW main loop. | |
| main_fbw.h | |
| Fly By Wire: | |
| mcu.c | |
| Arch independent mcu ( Micro Controller Unit ) utilities. | |
| mcu.h | |
| Arch independent mcu ( Micro Controller Unit ) utilities. | |
| paparazzi.h | |
| pprz_debug.c | |
| pprz_debug.h | |
| pprz_syscalls.c | |
| state.c | |
| General interface for the main vehicle states. | |
| state.h | |
| API to get/set the generic vehicle states. | |