Go to the source code of this file.
Definition at line 7 of file std.h.
Definition at line 5 of file std.h.
Definition at line 4 of file std.h.
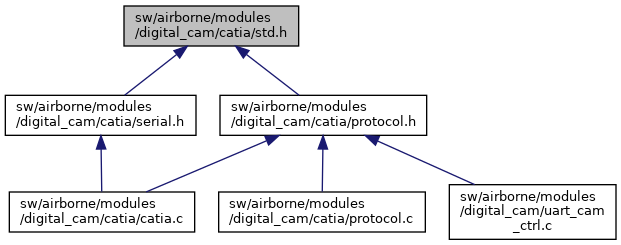
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: