|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
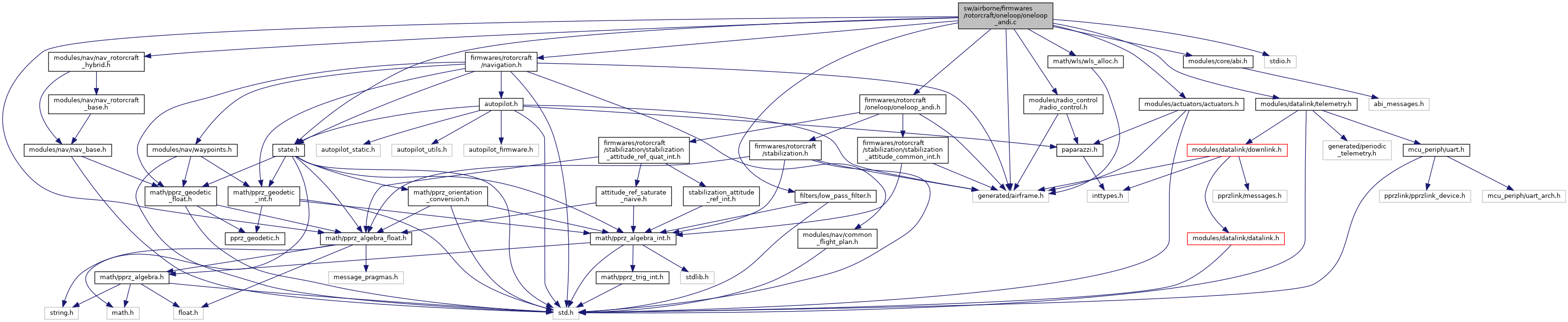
#include "firmwares/rotorcraft/oneloop/oneloop_andi.h"#include "math/pprz_algebra_float.h"#include "state.h"#include "generated/airframe.h"#include "modules/radio_control/radio_control.h"#include "modules/actuators/actuators.h"#include "modules/core/abi.h"#include "filters/low_pass_filter.h"#include "filters/notch_filter_float.h"#include "math/wls/wls_alloc.h"#include "modules/nav/nav_rotorcraft_hybrid.h"#include "firmwares/rotorcraft/navigation.h"#include "modules/rotwing_drone/rotwing_state.h"#include "modules/core/commands.h"#include "modules/ctrl/eff_scheduling_rotwing_V2.h"#include <stdio.h>#include "modules/gps/gps.h"#include "modules/datalink/telemetry.h" Include dependency graph for oneloop_andi.c:
Include dependency graph for oneloop_andi.c:Go to the source code of this file.
Functions | |
| PRINT_CONFIG_VAR (ONELOOP_ANDI_FILT_CUTOFF) | |
| PRINT_CONFIG_VAR (ONELOOP_ANDI_FILT_CUTOFF_Q) | |
| PRINT_CONFIG_VAR (ONELOOP_ANDI_FILT_CUTOFF_P) | |
| PRINT_CONFIG_VAR (ONELOOP_ANDI_FILT_CUTOFF_R) | |
| void | init_poles (void) |
| Initialize Position of Poles. | |
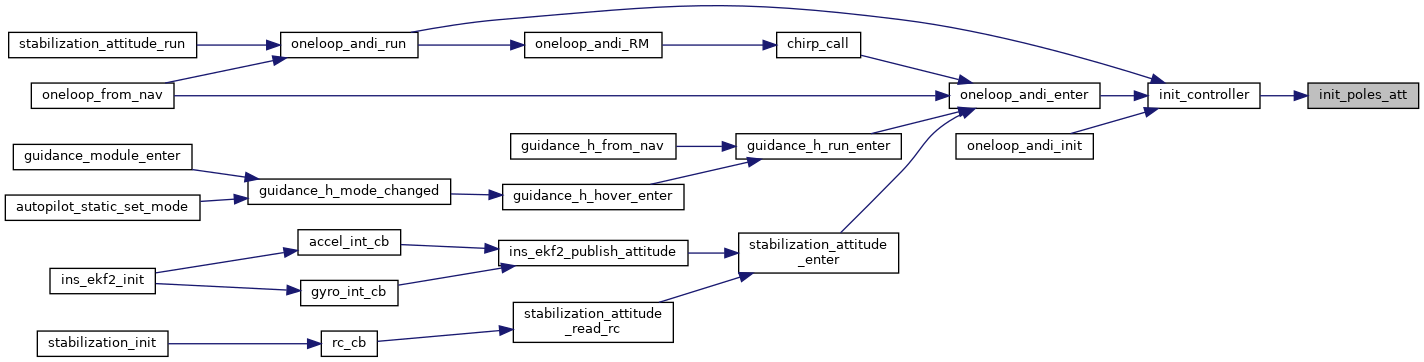
| void | init_poles_att (void) |
| Initialize Position of Poles. | |
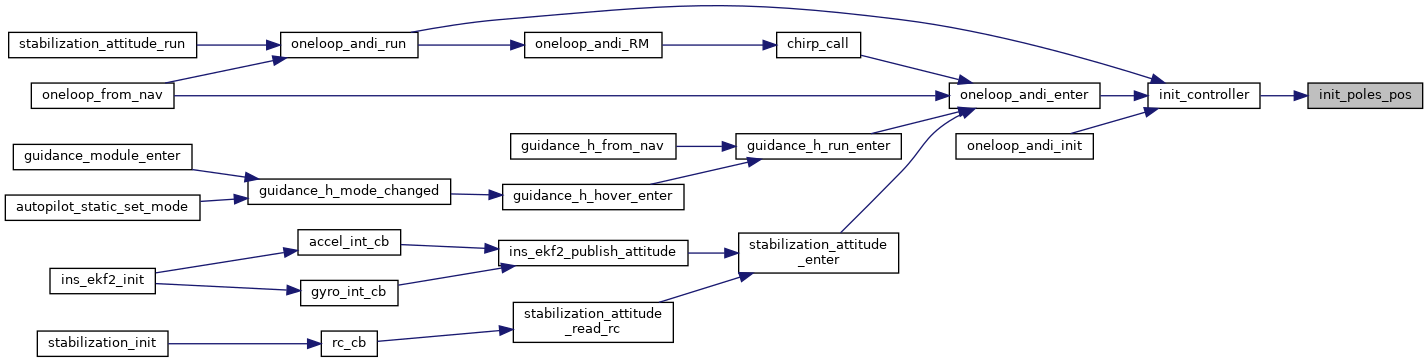
| void | init_poles_pos (void) |
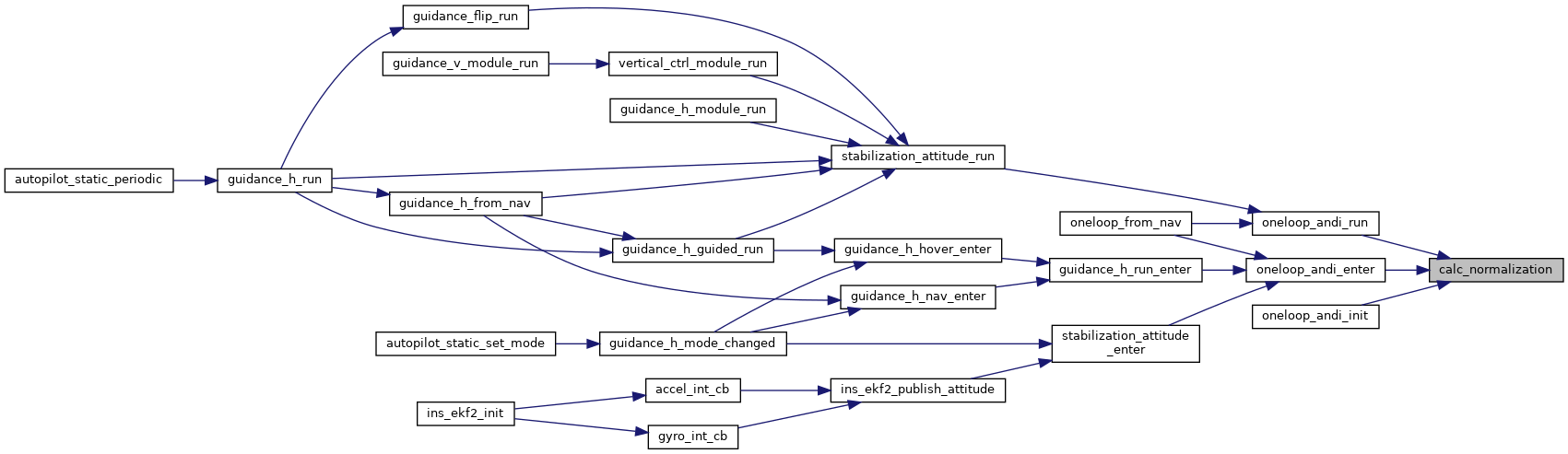
| void | calc_normalization (void) |
| Calculate Normalization of actuators and discrete actuator dynamics | |
| void | normalize_nu (void) |
| Function to normalize the pseudo control vector. | |
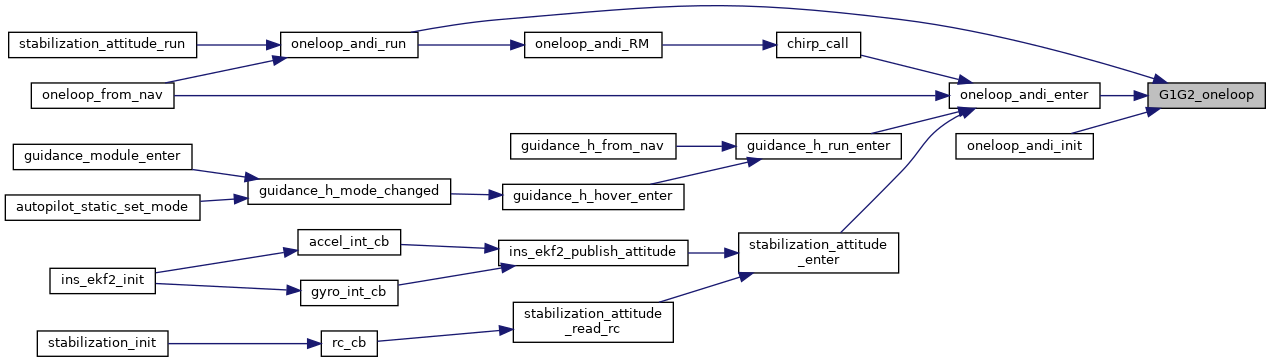
| void | G1G2_oneloop (int ctrl_type) |
| Function that samples and scales the effectiveness matrix FIXME: make this function into a for loop to make it more adaptable to different configurations. | |
| void | get_act_state_oneloop (void) |
| Function to reconstruct actuator state using first order dynamics. | |
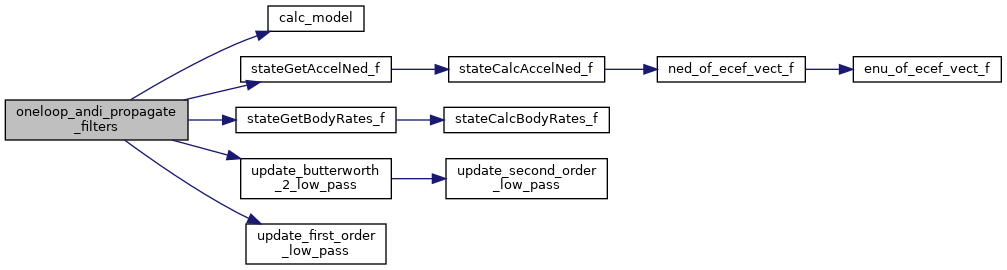
| void | oneloop_andi_propagate_filters (void) |
| Propagate the filters. | |
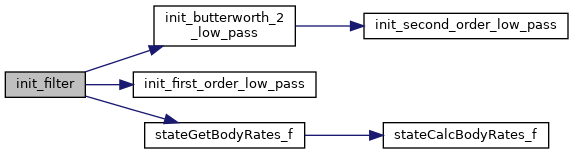
| void | init_filter (void) |
| Initialize the filters. | |
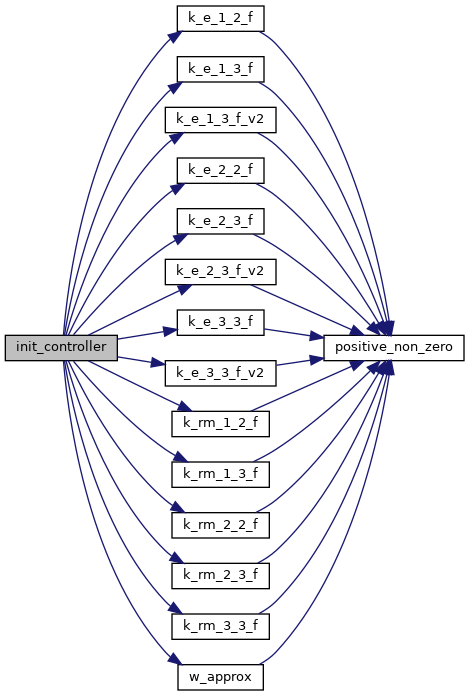
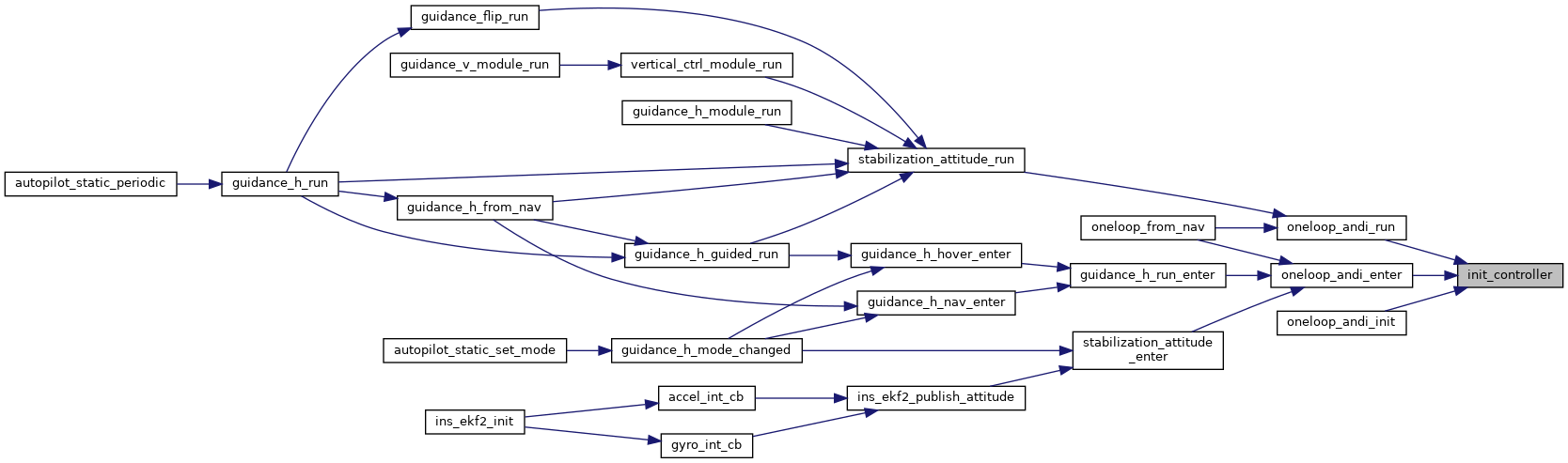
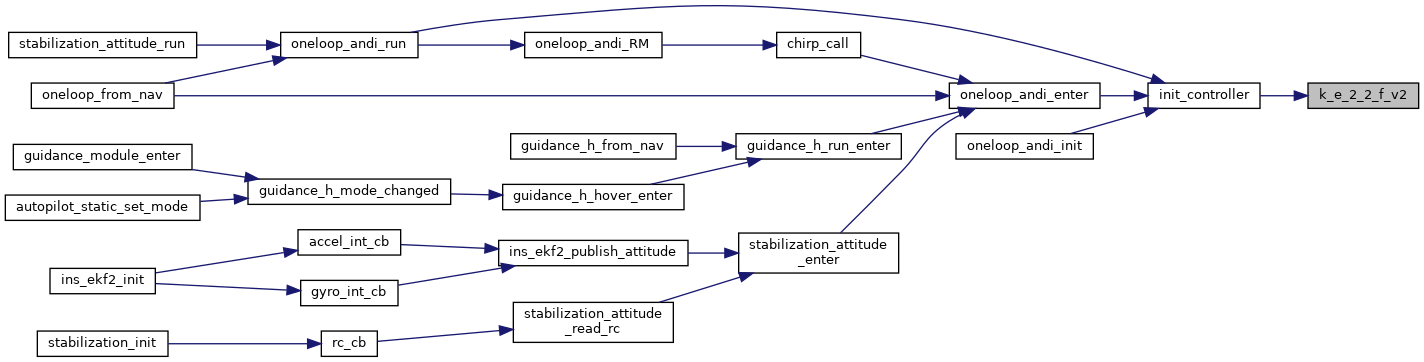
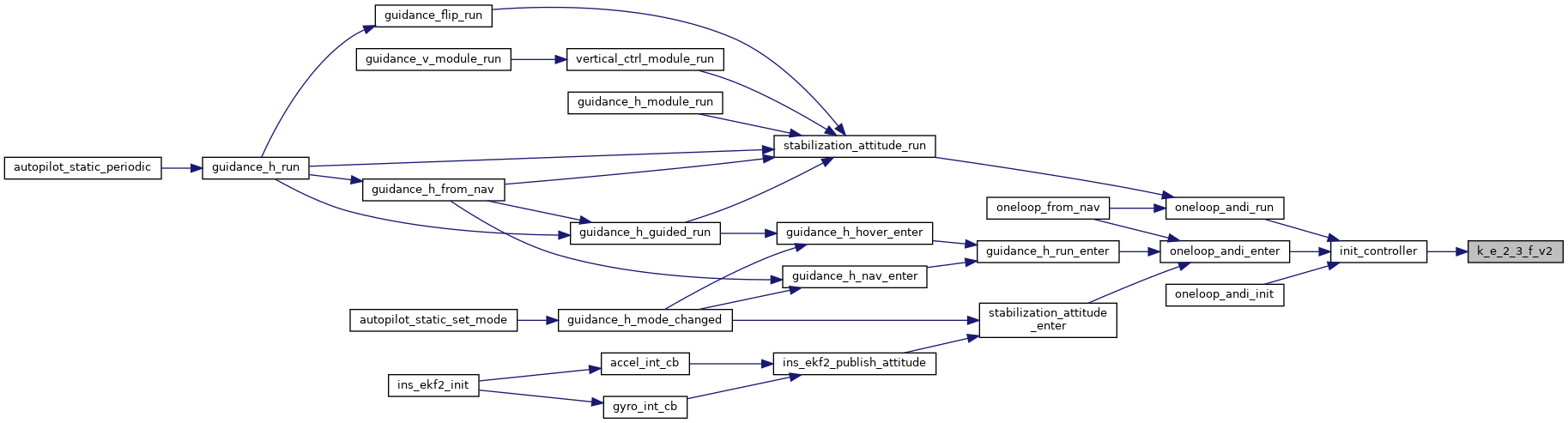
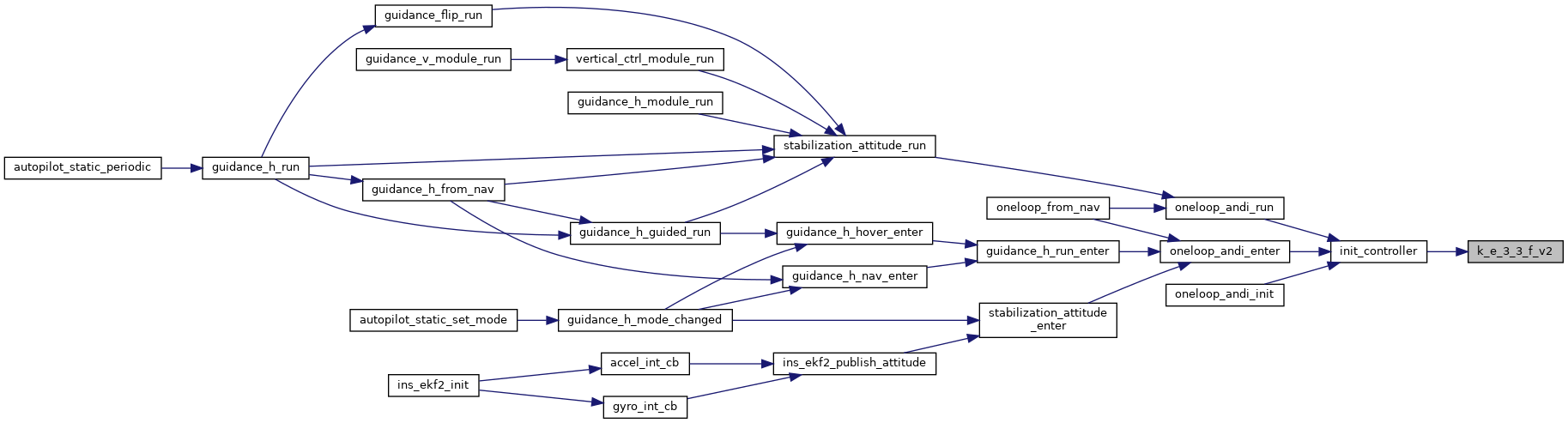
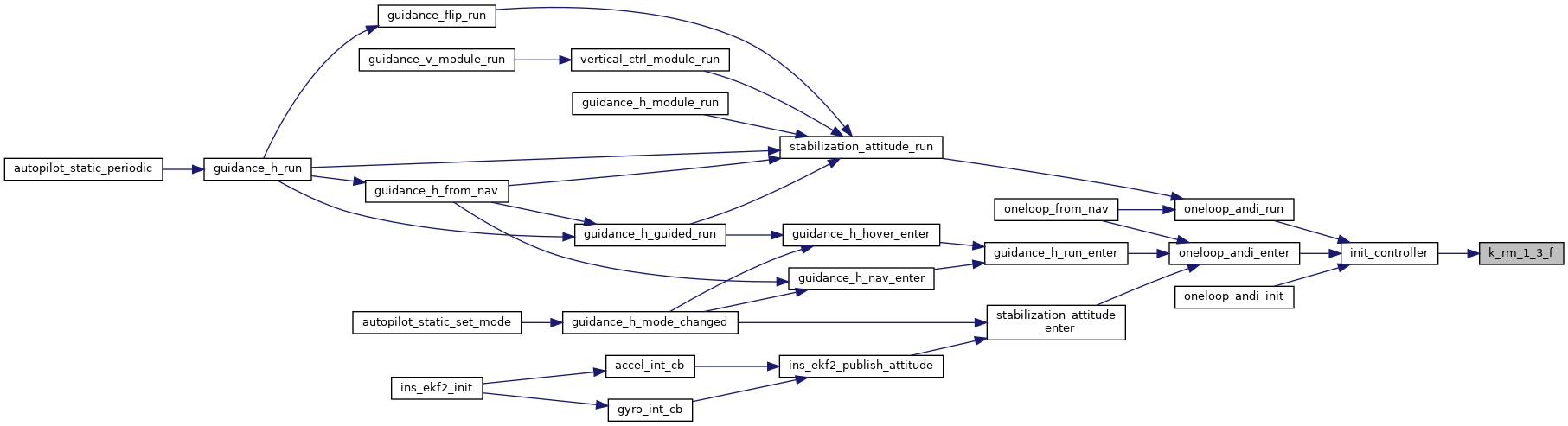
| void | init_controller (void) |
| Initialize Controller Gains FIXME: Calculate the gains dynamically for transition. | |
| void | float_rates_of_euler_dot_vec (float r[3], float e[3], float edot[3]) |
| Attitude Rates to Euler Conversion Function. | |
| void | float_euler_dot_of_rates_vec (float r[3], float e[3], float edot[3]) |
| Attitude Euler to Rates Conversion Function. | |
| void | err_nd (float err[], float a[], float b[], float k[], int n) |
| Calculate Scaled Error between two 3D arrays. | |
| void | err_sum_nd (float err[], float a[], float b[], float k[], float c[], int n) |
| Calculate Scaled Error between two 3D arrays. | |
| void | integrate_nd (float dt, float a[], float a_dot[], int n) |
| Integrate in time 3D array. | |
| void | vect_bound_nd (float vect[], float bound, int n) |
| Scale a 3D array to within a 3D bound. | |
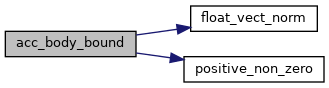
| void | acc_body_bound (struct FloatVect2 *vect, float bound) |
| Scale a 3D array to within a 3D bound. | |
| float | bound_v_from_a (float e_x[], float v_bound, float a_bound, int n) |
| Calculate velocity limit based on acceleration limit. | |
| void | rm_2nd (float dt, float *x_ref, float *x_d_ref, float *x_2d_ref, float x_des, float k1_rm, float k2_rm) |
| Reference Model Definition for 2nd order system. | |
| void | rm_3rd (float dt, float *x_ref, float *x_d_ref, float *x_2d_ref, float *x_3d_ref, float x_des, float k1_rm, float k2_rm, float k3_rm) |
| Reference Model Definition for 3rd order system. | |
| void | rm_3rd_head (float dt, float *x_ref, float *x_d_ref, float *x_2d_ref, float *x_3d_ref, float x_des, float k1_rm, float k2_rm, float k3_rm) |
| Reference Model Definition for 3rd order system specific to the heading angle. | |
| void | rm_3rd_attitude (float dt, float x_ref[3], float x_d_ref[3], float x_2d_ref[3], float x_3d_ref[3], float x_des[3], bool ow_psi, float psi_overwrite[4], float k1_rm[3], float k2_rm[3], float k3_rm[3], float max_ang_jerk) |
| Reference Model Definition for 3rd order system with attitude conversion functions. | |
| void | rm_3rd_pos (float dt, float x_ref[], float x_d_ref[], float x_2d_ref[], float x_3d_ref[], float x_des[], float k1_rm[], float k2_rm[], float k3_rm[], float x_d_bound, float x_2d_bound, float x_3d_bound, int n) |
| Reference Model Definition for 3rd order system specific to positioning with bounds. | |
| void | rm_2nd_pos (float dt, float x_d_ref[], float x_2d_ref[], float x_3d_ref[], float x_d_des[], float k2_rm[], float k3_rm[], float x_2d_bound, float x_3d_bound, int n) |
| Reference Model Definition for 3rd order system specific to positioning with bounds. | |
| void | rm_1st_pos (float dt, float x_2d_ref[], float x_3d_ref[], float x_2d_des[], float k3_rm[], float x_3d_bound, int n) |
| Reference Model Definition for 3rd order system specific to positioning with bounds. | |
| void | ec_3rd_att (float y_4d[3], float x_ref[3], float x_d_ref[3], float x_2d_ref[3], float x_3d_ref[3], float x[3], float x_d[3], float x_2d[3], float k1_e[3], float k2_e[3], float k3_e[3], float max_ang_jerk) |
| Error Controller Definition for 3rd order system specific to attitude. | |
| void | ec_3rd_pos (float y_4d[], float x_ref[], float x_d_ref[], float x_2d_ref[], float x_3d_ref[], float x[], float x_d[], float x_2d[], float k1_e[], float k2_e[], float k3_e[], float x_d_bound, float x_2d_bound, float x_3d_bound, int n) |
| void | calc_model (void) |
| Function that calculates the model prediction for the complementary filter. | |
| float | oneloop_andi_sideslip (void) |
| Function to calculate corrections for sideslip. | |
| void | reshape_wind (void) |
| void | chirp_pos (float time_elapsed, float f0, float f1, float t_chirp, float A, int8_t n, float psi, float p_ref[], float v_ref[], float a_ref[], float j_ref[], float p_ref_0[]) |
| Reference Model Definition for 3rd order system specific to positioning with bounds. | |
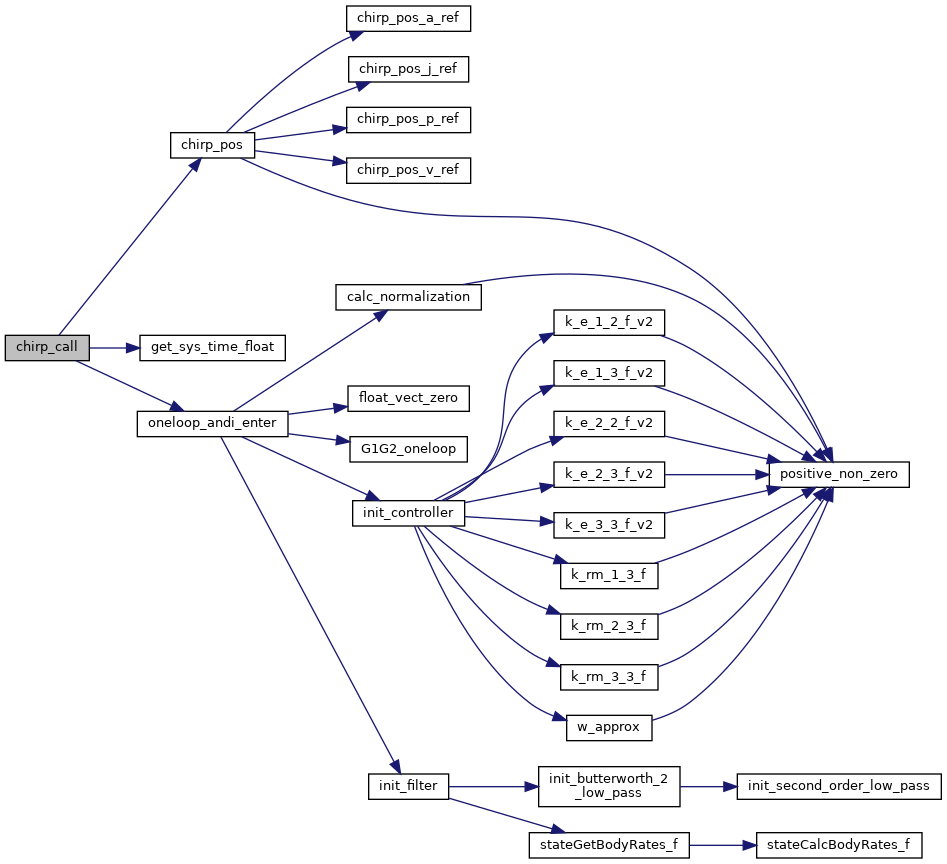
| void | chirp_call (bool *chirp_on, bool *chirp_first_call, float *t_0_chirp, float *time_elapsed, float f0, float f1, float t_chirp, float A, int8_t n, float psi, float p_ref[], float v_ref[], float a_ref[], float j_ref[], float p_ref_0[]) |
| void | init_cf2 (struct CF2_t *cf, float fc) |
| Initialize the Complementary Filters 2nd Order Butterworth. | |
| void | init_cf4 (struct CF4_t *cf, float fc) |
| Initialize the Complementary Filters 4th Order Butterworth. | |
| void | init_all_cf (void) |
| Initialize all the Complementary Filters. | |
| void | reinit_cf2 (struct CF2_t *cf, bool reinit) |
| Reinitialize 2nd Order CF if new frequency setting or if forced. | |
| void | reinit_cf4 (struct CF4_t *cf, bool reinit) |
| Reinitialize 4th Order CF if new frequency setting or if forced. | |
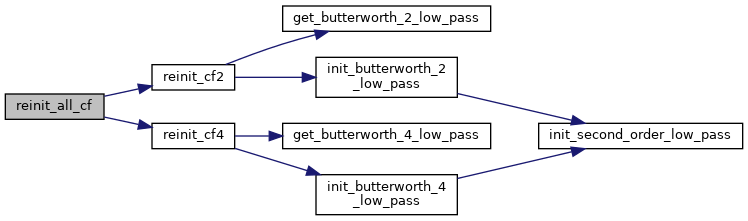
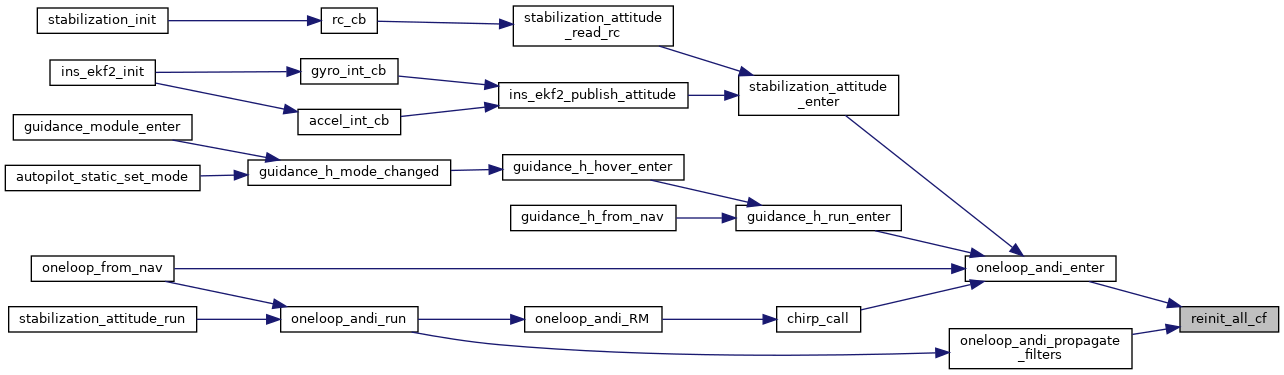
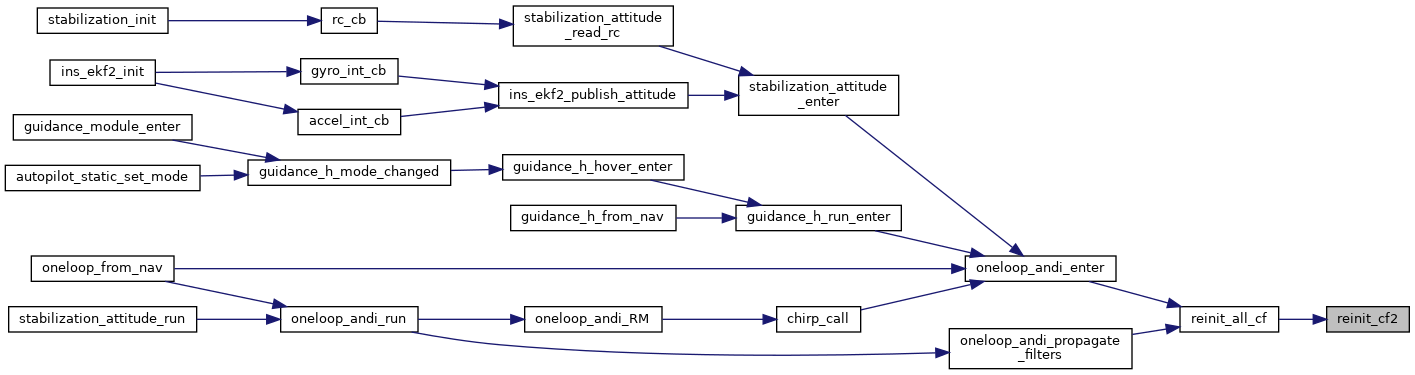
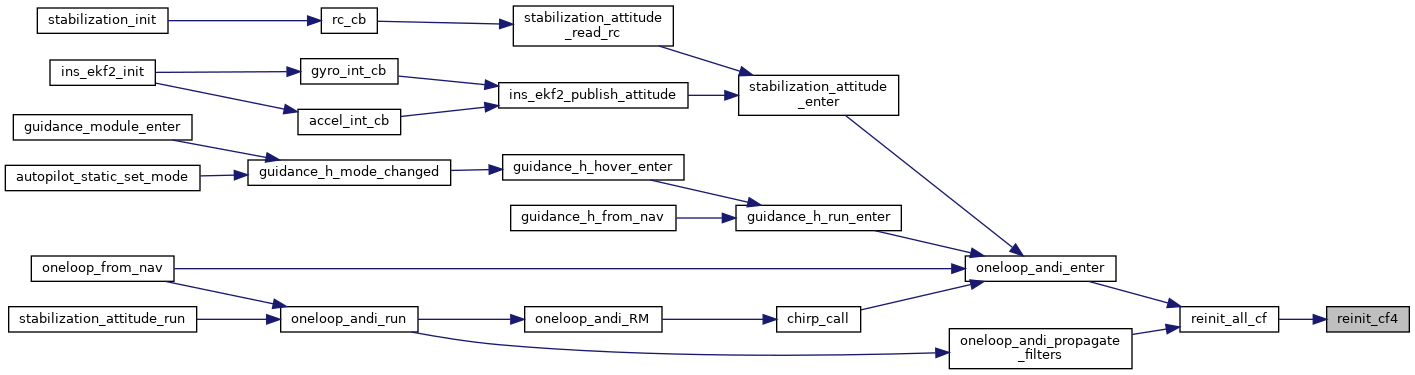
| void | reinit_all_cf (bool reinit) |
| Reinitialize all the Complementary Filters. | |
| static void | send_wls_v_oneloop (struct transport_tx *trans, struct link_device *dev) |
| static void | send_wls_u_oneloop (struct transport_tx *trans, struct link_device *dev) |
| static void | send_eff_mat_stab_oneloop_andi (struct transport_tx *trans, struct link_device *dev) |
| static void | send_eff_mat_guid_oneloop_andi (struct transport_tx *trans, struct link_device *dev) |
| static void | send_oneloop_andi (struct transport_tx *trans, struct link_device *dev) |
| static void | send_guidance_oneloop_andi (struct transport_tx *trans, struct link_device *dev) |
| static void | debug_vect (struct transport_tx *trans, struct link_device *dev, char *name, float *data, int datasize) |
| static void | send_oneloop_debug (struct transport_tx *trans, struct link_device *dev) |
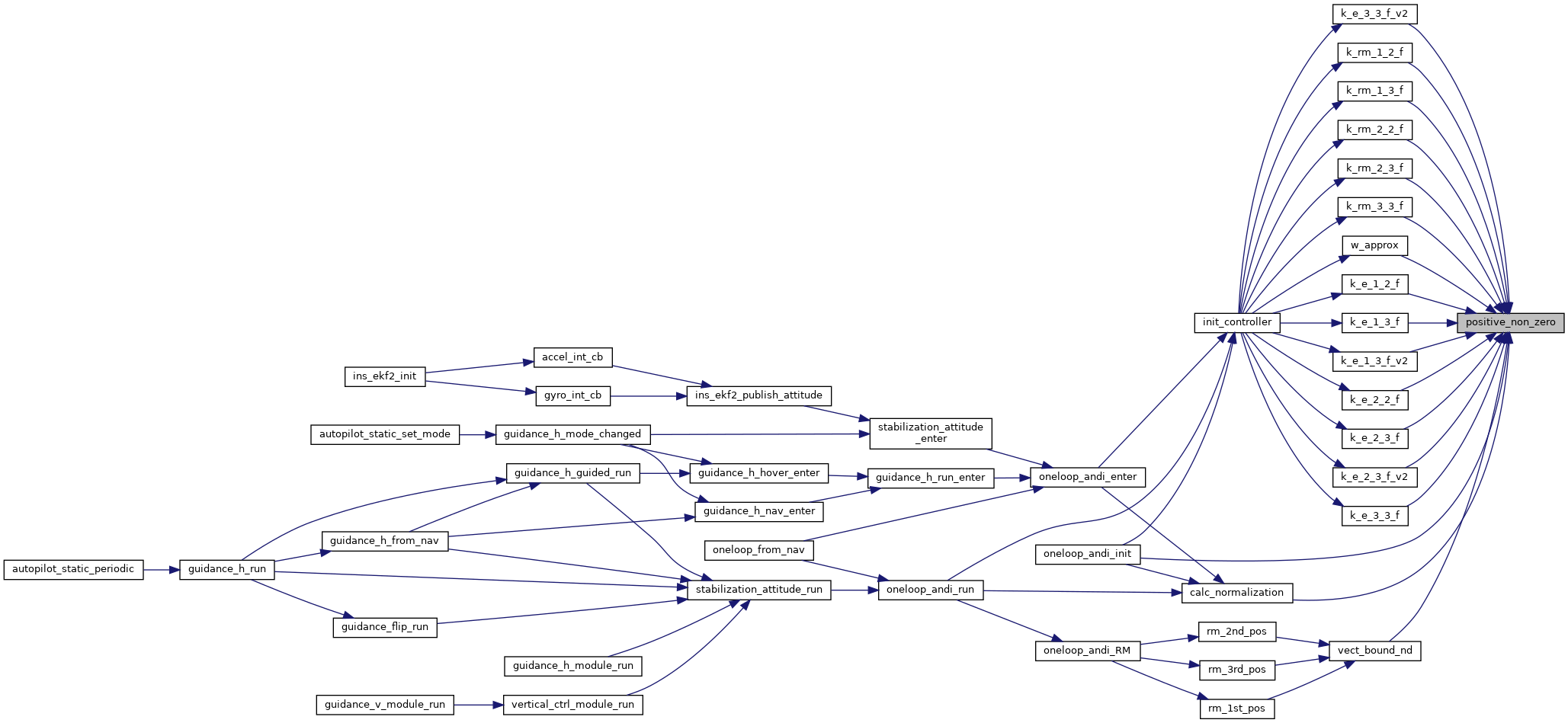
| static float | positive_non_zero (float input) |
| Function to make sure that inputs are positive non zero vaues. | |
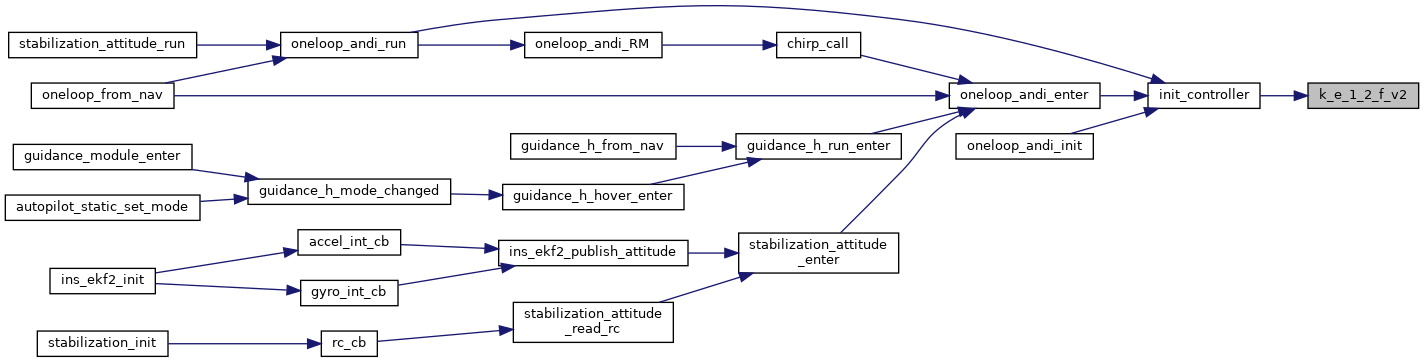
| static float | k_e_1_2_f_v2 (float omega, float zeta) |
| Error Controller Gain Design. | |
| static float | k_e_2_2_f_v2 (float omega, float zeta) |
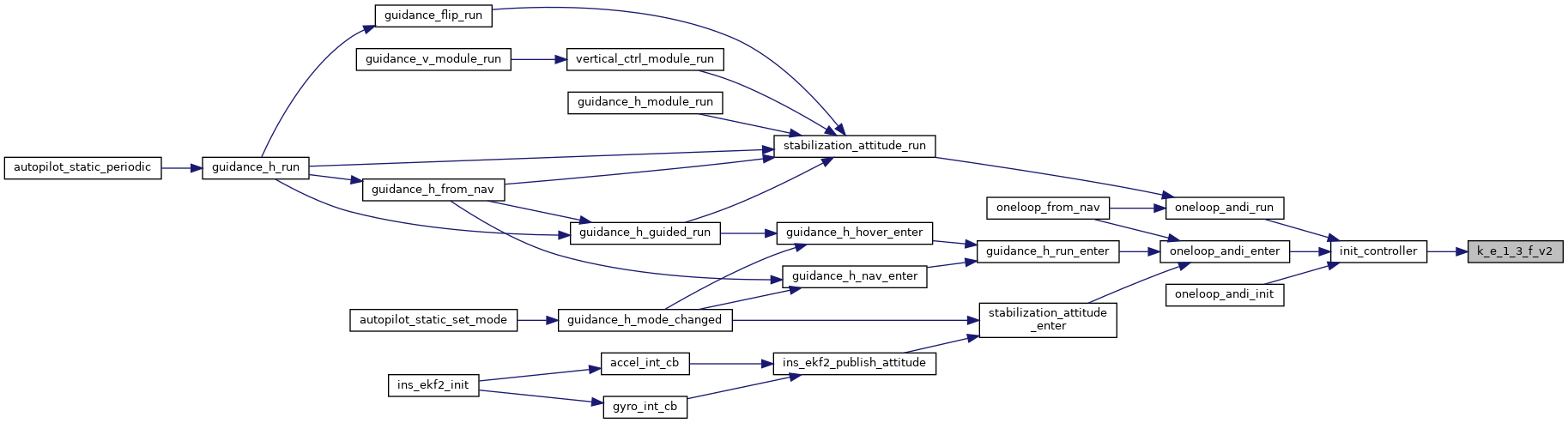
| static float | k_e_1_3_f_v2 (float omega_n, UNUSED float zeta, float p1) |
| static float | k_e_2_3_f_v2 (float omega_n, float zeta, float p1) |
| static float | k_e_3_3_f_v2 (float omega_n, float zeta, float p1) |
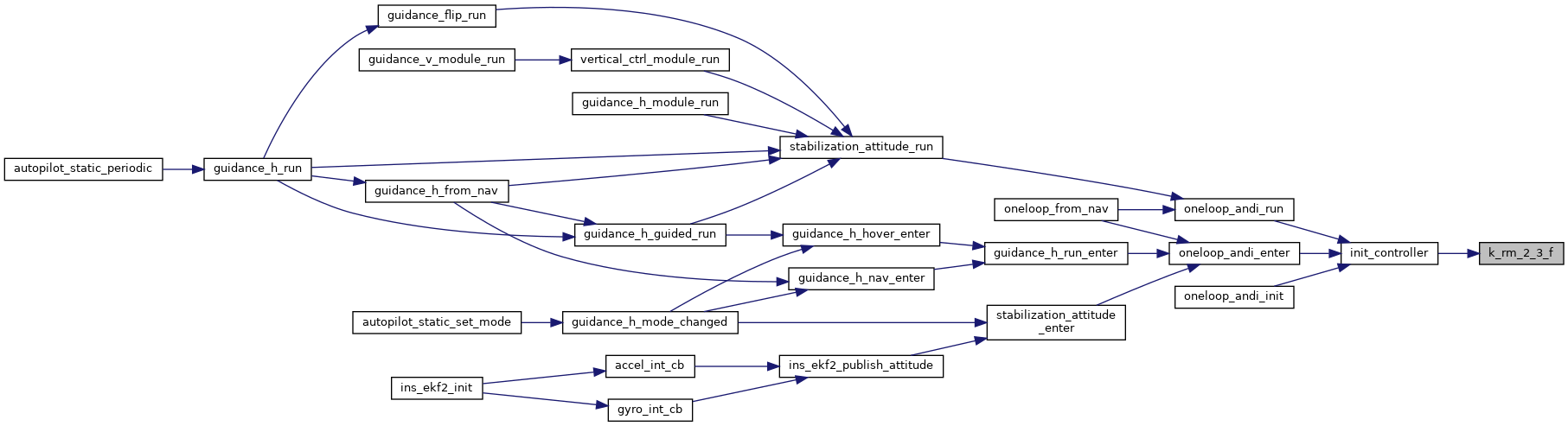
| static float | k_rm_1_3_f (float omega_n, float zeta, float p1) |
| Reference Model Gain Design. | |
| static float | k_rm_2_3_f (float omega_n, float zeta, float p1) |
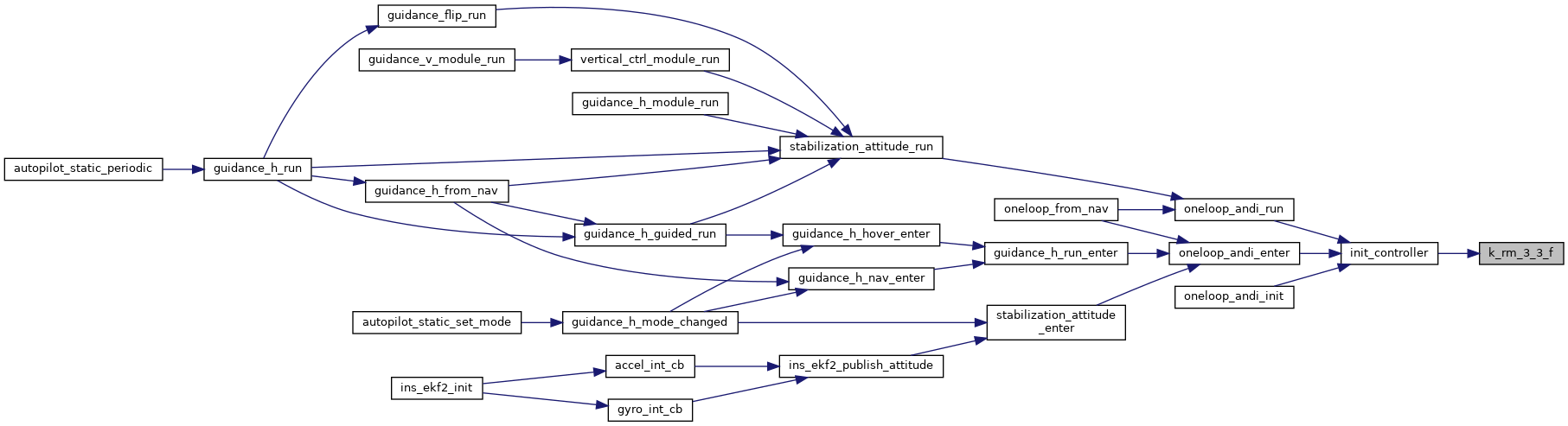
| static float | k_rm_3_3_f (float omega_n, float zeta, float p1) |
| static float | ec_3rd (float x_ref, float x_d_ref, float x_2d_ref, float x_3d_ref, float x, float x_d, float x_2d, float k1_e, float k2_e, float k3_e) |
| Error Controller Definition for 3rd order system. | |
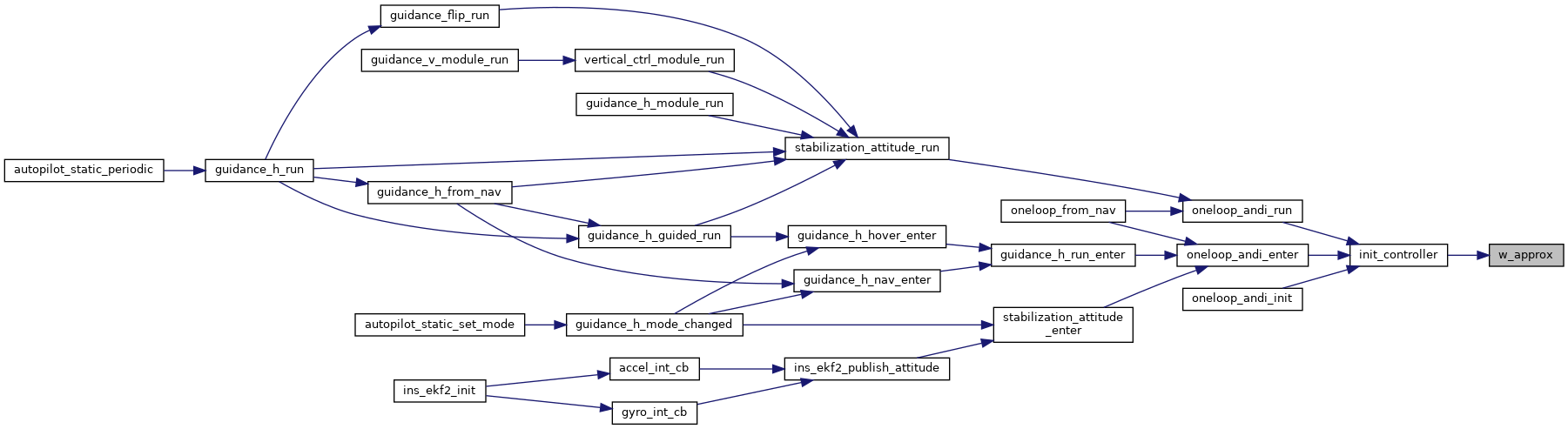
| static float | w_approx (float p1, float p2, float p3, float rm_k) |
| Third Order to First Order Dynamics Approximation. | |
| static float | ec_poles (float p_rm, float slow_pole, float k) |
| Calculate EC poles given RM poles. | |
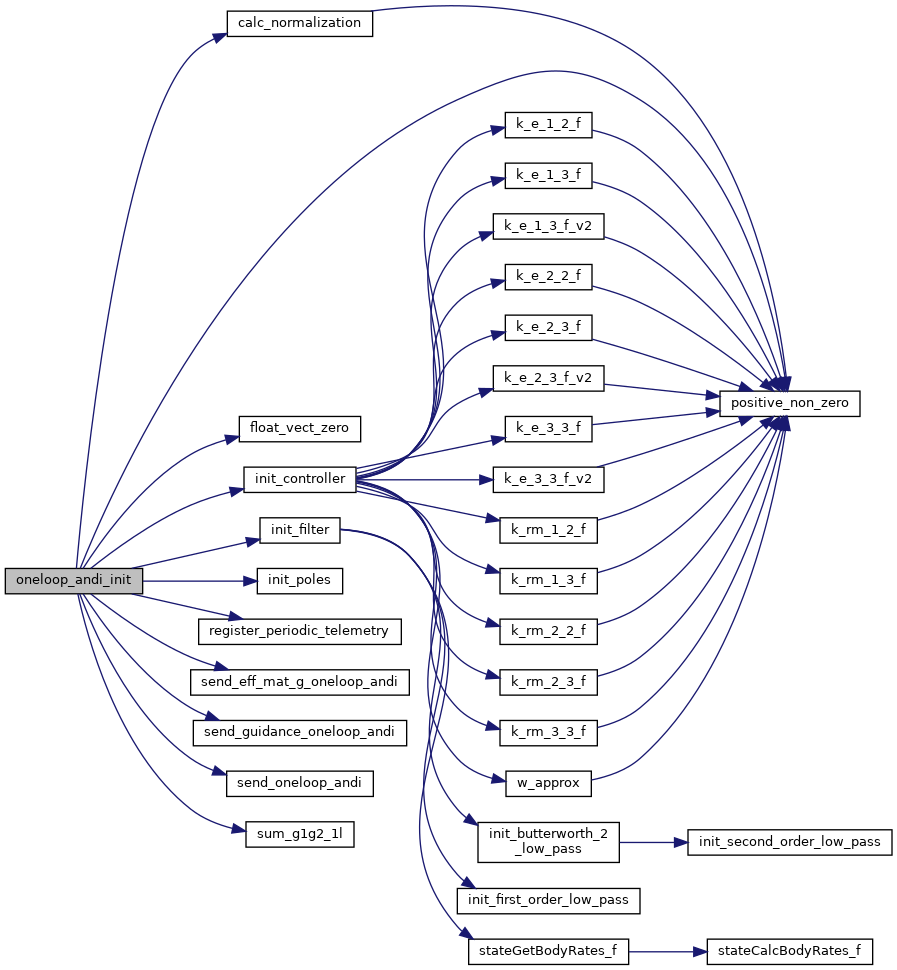
| void | oneloop_andi_init (void) |
| Init function of Oneloop ANDI controller | |
| void | oneloop_andi_enter (bool half_loop_sp, int ctrl_type) |
| Function that resets important values upon engaging Oneloop ANDI. | |
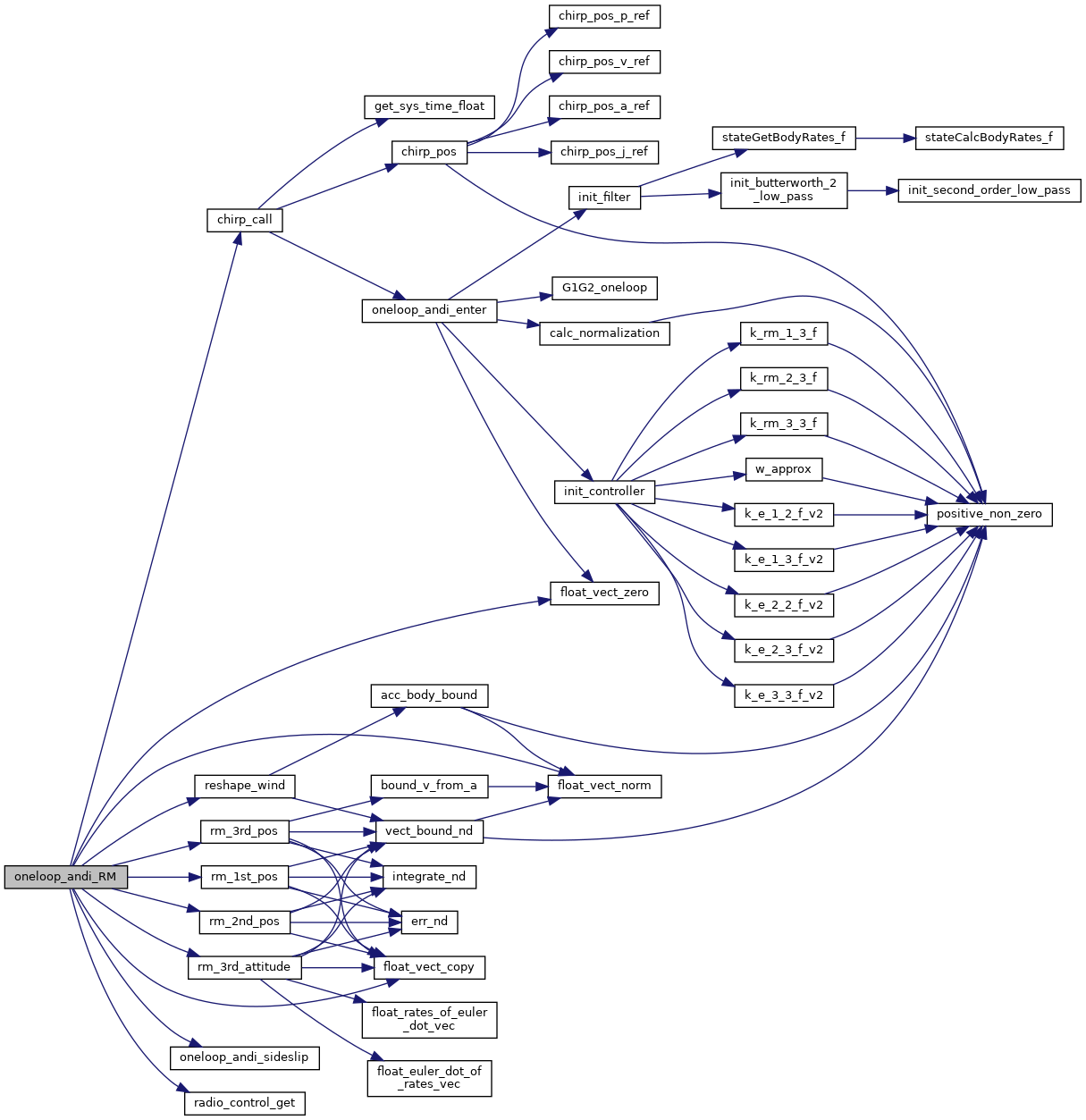
| void | oneloop_andi_RM (bool half_loop, struct FloatVect3 PSA_des, int rm_order_h, int rm_order_v, bool in_flight_oneloop) |
| Function to generate the reference signals for the oneloop controller. | |
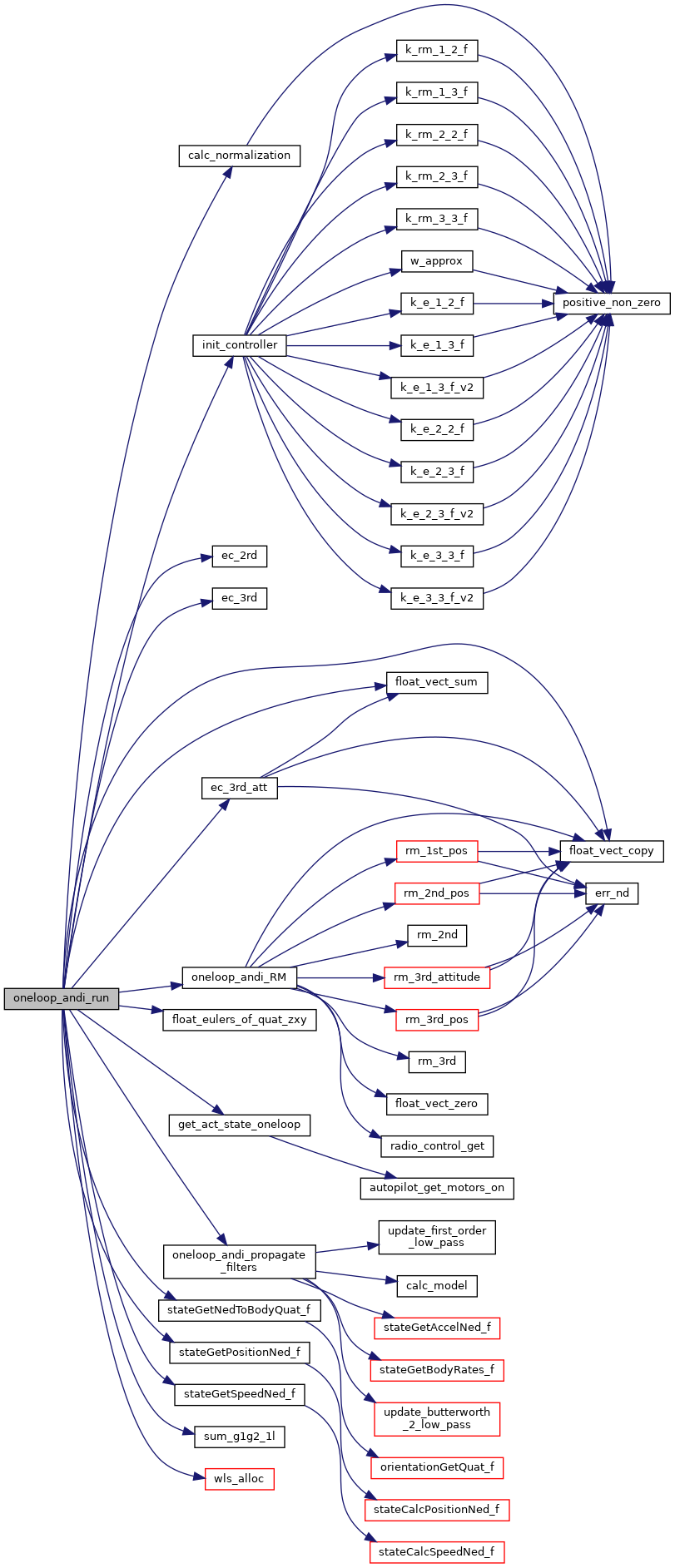
| void | oneloop_andi_run (bool in_flight, bool half_loop, struct FloatVect3 PSA_des, int rm_order_h, int rm_order_v) |
| Main function that runs the controller and performs control allocation. | |
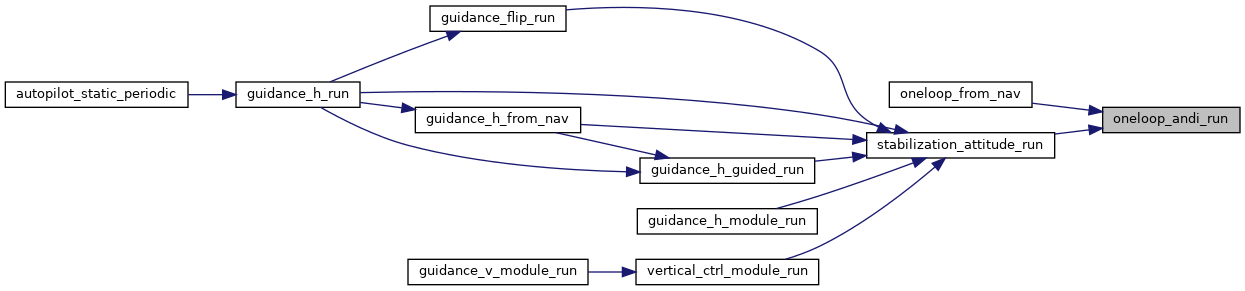
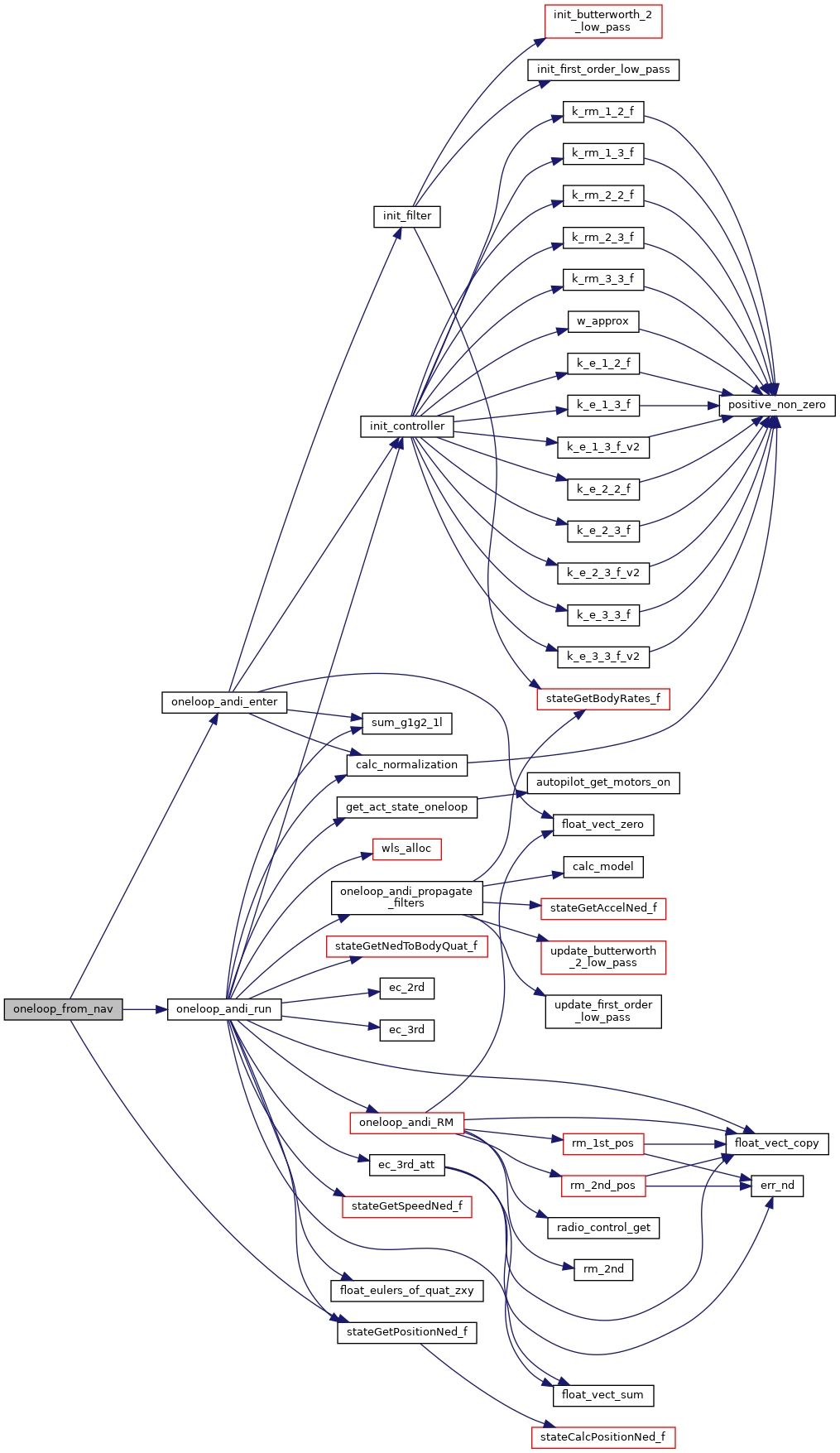
| void | oneloop_from_nav (bool in_flight) |
| Function that maps navigation inputs to the oneloop controller for the generated autopilot. | |
| static float | chirp_pos_p_ref (float delta_t, float f0, float k, float A) |
| Function to calculate the position reference during the chirp. | |
| static float | chirp_pos_v_ref (float delta_t, float f0, float k, float A) |
| Function to calculate the velocity reference during the chirp. | |
| static float | chirp_pos_a_ref (float delta_t, float f0, float k, float A) |
| Function to calculate the acceleration reference during the chirp. | |
| static float | chirp_pos_j_ref (float delta_t, float f0, float k, float A) |
| Function to calculate the jerk reference during the chirp. | |
| bool | autopilot_in_flight_end_detection (bool motors_on UNUSED) |
| Quadplanes can still be in-flight with COMMAND_THRUST==0 and can even soar not descending in updrafts with all thrust off. | |
| void | guidance_set_min_max_airspeed (float min_airspeed, float max_airspeed) |
| #define ONELOOP_ANDI_AIRSPEED_SWITCH_THRESHOLD 10.0 |
Definition at line 243 of file oneloop_andi.c.
Definition at line 218 of file oneloop_andi.c.
| #define ONELOOP_ANDI_MAX_BANK act_max[COMMAND_ROLL] |
Definition at line 222 of file oneloop_andi.c.
| #define ONELOOP_ANDI_MAX_PHI act_max[COMMAND_ROLL] |
Definition at line 223 of file oneloop_andi.c.
| #define ONELOOP_ANDI_MAX_THETA act_max[COMMAND_PITCH] |
Definition at line 225 of file oneloop_andi.c.
Definition at line 110 of file oneloop_andi.c.
| #define USE_YAW_NOTCH |
| void acc_body_bound | ( | struct FloatVect2 * | vect, |
| float | bound | ||
| ) |
Scale a 3D array to within a 3D bound.
Definition at line 716 of file oneloop_andi.c.
References float_vect_norm(), foo, Min, positive_non_zero(), FloatVect2::x, and FloatVect2::y.
Referenced by reshape_wind().
Here is the call graph for this function: Here is the caller graph for this function:Quadplanes can still be in-flight with COMMAND_THRUST==0 and can even soar not descending in updrafts with all thrust off.
Definition at line 2184 of file oneloop_andi.c.
Calculate velocity limit based on acceleration limit.
Definition at line 736 of file oneloop_andi.c.
References float_vect_norm(), and foo.
Referenced by rm_3rd_pos().
Here is the call graph for this function: Here is the caller graph for this function:Function that calculates the model prediction for the complementary filter.
Definition at line 1969 of file oneloop_andi.c.
References actuator_state_1l, ANDI_NUM_ACT, Oneloop_CF_t::ax, Oneloop_CF_t::ay, Oneloop_CF_t::az, cf, EFF_MAT_RW, RW_Model::ele_pref, eulers_zxy, foo, g, wing_model::L, RW_Model::m, CF4_t::model, CF2_t::model, RW_Model::P, P, Oneloop_CF_t::p_dot, FloatEulers::phi, FloatEulers::psi, Oneloop_CF_t::q_dot, Oneloop_CF_t::r_dot, RW, RW_Model::T, FloatEulers::theta, and RW_Model::wing.
Referenced by oneloop_andi_propagate_filters().
Here is the caller graph for this function:Calculate Normalization of actuators and discrete actuator dynamics
Definition at line 1925 of file oneloop_andi.c.
References act_dynamics, act_dynamics_d, act_max, act_max_norm, act_min, act_min_norm, ANDI_NUM_ACT_TOT, ANDI_OUTPUTS, dt_1l, foo, max_j_ang, max_j_nav, MAX_PPRZ, nu_norm_max, positive_non_zero(), ratio_u_un, ratio_vn_v, RW_aD, RW_aE, RW_aN, RW_ap, RW_aq, and RW_ar.
Referenced by oneloop_andi_enter(), oneloop_andi_init(), and oneloop_andi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void chirp_call | ( | bool * | chirp_on, |
| bool * | chirp_first_call, | ||
| float * | t_0_chirp, | ||
| float * | time_elapsed, | ||
| float | f0, | ||
| float | f1, | ||
| float | t_chirp, | ||
| float | A, | ||
| int8_t | n, | ||
| float | psi, | ||
| float | p_ref[], | ||
| float | v_ref[], | ||
| float | a_ref[], | ||
| float | j_ref[], | ||
| float | p_ref_0[] | ||
| ) |
Definition at line 2160 of file oneloop_andi.c.
References A, chirp_first_call, chirp_on, chirp_pos(), OneloopGeneral::ctrl_type, foo, get_sys_time_float(), oneloop_andi, oneloop_andi_enter(), p_ref_0, and t_chirp.
Referenced by oneloop_andi_RM().
Here is the call graph for this function: Here is the caller graph for this function:| void chirp_pos | ( | float | time_elapsed, |
| float | f0, | ||
| float | f1, | ||
| float | t_chirp, | ||
| float | A, | ||
| int8_t | n, | ||
| float | psi, | ||
| float | p_ref[], | ||
| float | v_ref[], | ||
| float | a_ref[], | ||
| float | j_ref[], | ||
| float | p_ref_0[] | ||
| ) |
Reference Model Definition for 3rd order system specific to positioning with bounds.
| dt | [s] time passed since start of the chirp |
| f0 | [Hz] initial frequency of the chirp |
| f1 | [Hz] final frequency of the chirp |
| t_chirp | [s] duration of the chirp |
| p_ref | [m] position reference |
| v_ref | [m/s] velocity reference |
| a_ref | [m/s2] acceleration reference |
| j_ref | [m/s3] jerk reference |
Definition at line 2096 of file oneloop_andi.c.
References A, chirp_pos_a_ref(), chirp_pos_j_ref(), chirp_pos_p_ref(), chirp_pos_v_ref(), foo, p_ref_0, pitch_pref, positive_non_zero(), t_chirp, and theta_pref_max.
Referenced by chirp_call().
Here is the call graph for this function: Here is the caller graph for this function:Function to calculate the acceleration reference during the chirp.
Definition at line 2075 of file oneloop_andi.c.
Referenced by chirp_pos().
Here is the caller graph for this function:Function to calculate the jerk reference during the chirp.
Definition at line 2080 of file oneloop_andi.c.
Referenced by chirp_pos().
Here is the caller graph for this function:Function to calculate the position reference during the chirp.
Definition at line 2065 of file oneloop_andi.c.
Referenced by chirp_pos().
Here is the caller graph for this function:Function to calculate the velocity reference during the chirp.
Definition at line 2070 of file oneloop_andi.c.
Referenced by chirp_pos().
Here is the caller graph for this function:
|
static |
Definition at line 558 of file oneloop_andi.c.
Referenced by send_oneloop_debug().
Here is the caller graph for this function:
|
static |
Error Controller Definition for 3rd order system.
| dt | Delta time [s] |
| x_ref | Reference signal 1st order |
| x_d_ref | Reference signal 2nd order |
| x_2d_ref | Reference signal 3rd order |
| x_3d_ref | Reference signal 4th order |
| x_des | Desired 1st order signal |
| x | Current 1st order signal |
| x_d | Current 2nd order signal |
| x_2d | Current 3rd order signal |
| k1_e | Error Controller Gain 1st order signal |
| k2_e | Error Controller Gain 2nd order signal |
| k3_e | Error Controller Gain 3rd order signal |
Definition at line 944 of file oneloop_andi.c.
References foo.
Referenced by oneloop_andi_run().
Here is the caller graph for this function:| void ec_3rd_att | ( | float | y_4d[3], |
| float | x_ref[3], | ||
| float | x_d_ref[3], | ||
| float | x_2d_ref[3], | ||
| float | x_3d_ref[3], | ||
| float | x[3], | ||
| float | x_d[3], | ||
| float | x_2d[3], | ||
| float | k1_e[3], | ||
| float | k2_e[3], | ||
| float | k3_e[3], | ||
| float | max_ang_jerk | ||
| ) |
Error Controller Definition for 3rd order system specific to attitude.
| dt | Delta time [s] |
| x_ref | Reference signal 1st order |
| x_d_ref | Reference signal 2nd order |
| x_2d_ref | Reference signal 3rd order |
| x_3d_ref | Reference signal 4th order |
| x_des | Desired 1st order signal |
| x | Current 1st order signal |
| x_d | Current 2nd order signal |
| x_2d | Current 3rd order signal |
| k1_e | Error Controller Gain 1st order signal |
| k2_e | Error Controller Gain 2nd order signal |
| k3_e | Error Controller Gain 3rd order signal |
Definition at line 976 of file oneloop_andi.c.
References err_nd(), float_vect_copy(), float_vect_sum(), foo, and vect_bound_nd().
Referenced by oneloop_andi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void ec_3rd_pos | ( | float | y_4d[], |
| float | x_ref[], | ||
| float | x_d_ref[], | ||
| float | x_2d_ref[], | ||
| float | x_3d_ref[], | ||
| float | x[], | ||
| float | x_d[], | ||
| float | x_2d[], | ||
| float | k1_e[], | ||
| float | k2_e[], | ||
| float | k3_e[], | ||
| float | x_d_bound, | ||
| float | x_2d_bound, | ||
| float | x_3d_bound, | ||
| int | n | ||
| ) |
Definition at line 948 of file oneloop_andi.c.
References err_sum_nd(), foo, and vect_bound_nd().
Referenced by oneloop_andi_run().
Here is the call graph for this function: Here is the caller graph for this function:Calculate EC poles given RM poles.
| p_rm | Reference Model Pole (3 coincident poles) |
| slow_pole | Pole of the slowest dynamics |
| k | EC / RM ratio |
| omega_n | Natural Frequency |
Definition at line 1018 of file oneloop_andi.c.
References foo, and positive_non_zero().
Referenced by init_poles(), init_poles_att(), and init_poles_pos().
Here is the call graph for this function: Here is the caller graph for this function:Calculate Scaled Error between two 3D arrays.
Definition at line 675 of file oneloop_andi.c.
References b.
Referenced by ec_3rd_att(), rm_1st_pos(), rm_2nd_pos(), rm_3rd_attitude(), and rm_3rd_pos().
Here is the caller graph for this function:Calculate Scaled Error between two 3D arrays.
Definition at line 684 of file oneloop_andi.c.
References b.
Referenced by ec_3rd_pos().
Here is the caller graph for this function:Attitude Euler to Rates Conversion Function.
Definition at line 660 of file oneloop_andi.c.
References foo.
Referenced by rm_3rd_attitude().
Here is the caller graph for this function:Attitude Rates to Euler Conversion Function.
Definition at line 648 of file oneloop_andi.c.
References foo.
Referenced by rm_3rd_attitude().
Here is the caller graph for this function:Function that samples and scales the effectiveness matrix FIXME: make this function into a for loop to make it more adaptable to different configurations.
Definition at line 1869 of file oneloop_andi.c.
References act_dynamics, airspeed_filt, ANDI_NUM_ACT_TOT, ANDI_OUTPUTS, CTRL_ANDI, CTRL_INDI, ctrl_off, EFF_MAT_G, EFF_MAT_RW, ELE_MIN_AS, foo, rotwing_state_t::hover_motors_enabled, SecondOrderLowPass::o, ratio_u_un, ratio_vn_v, rotwing_state, ROTWING_STATE_FORCE_HOVER, rotwing_state_hover_motors_running(), and rotwing_state_t::state.
Referenced by oneloop_andi_enter(), oneloop_andi_init(), and oneloop_andi_run().
Here is the call graph for this function: Here is the caller graph for this function:Function to reconstruct actuator state using first order dynamics.
Definition at line 1851 of file oneloop_andi.c.
References act_dynamics_d, act_max, act_min, actuator_state_1l, ANDI_NUM_ACT, andi_u, autopilot_get_motors_on(), and foo.
Referenced by oneloop_andi_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 2250 of file oneloop_andi.c.
References max_airspeed, max_as, and min_as.
Initialize all the Complementary Filters.
Definition at line 1230 of file oneloop_andi.c.
References Oneloop_CF_t::ax, Oneloop_CF_t::ay, Oneloop_CF_t::az, cf, init_cf2(), init_cf4(), oneloop_andi_filt_cutoff, oneloop_andi_filt_cutoff_a, oneloop_andi_filt_cutoff_p, oneloop_andi_filt_cutoff_q, oneloop_andi_filt_cutoff_r, Oneloop_CF_t::p, Oneloop_CF_t::p_dot, Oneloop_CF_t::q, Oneloop_CF_t::q_dot, Oneloop_CF_t::r, and Oneloop_CF_t::r_dot.
Referenced by oneloop_andi_init().
Here is the call graph for this function: Here is the caller graph for this function:Initialize the Complementary Filters 2nd Order Butterworth.
Definition at line 1208 of file oneloop_andi.c.
References cf, foo, and init_butterworth_2_low_pass().
Referenced by init_all_cf().
Here is the call graph for this function: Here is the caller graph for this function:Initialize the Complementary Filters 4th Order Butterworth.
Definition at line 1219 of file oneloop_andi.c.
References cf, foo, and init_butterworth_4_low_pass().
Referenced by init_all_cf().
Here is the call graph for this function: Here is the caller graph for this function:Initialize Controller Gains FIXME: Calculate the gains dynamically for transition.
Definition at line 1101 of file oneloop_andi.c.
References act_dynamics, foo, init_poles_att(), init_poles_pos(), Gains3rdOrder::k1, Gains3rdOrder::k2, Gains3rdOrder::k3, k_att_e, k_att_e_indi, k_att_rm, k_e_1_2_f_v2(), k_e_1_3_f_v2(), k_e_2_2_f_v2(), k_e_2_3_f_v2(), k_e_3_3_f_v2(), k_pos_e, k_pos_e_indi, k_pos_rm, k_rm_1_3_f(), k_rm_2_3_f(), k_rm_3_3_f(), max_a_nav, max_v_nav, nav_hybrid_max_bank, nav_hybrid_pos_gain, nav_max_acceleration_sp, nav_max_speed, PolePlacement::omega_n, ONELOOP_ANDI_MAX_BANK, PolePlacement::p3, p_alt_e, p_alt_rm, p_att_e, p_att_rm, p_head_e, p_head_rm, p_pos_e, p_pos_rm, w_approx(), and PolePlacement::zeta.
Referenced by oneloop_andi_enter(), oneloop_andi_init(), and oneloop_andi_run().
Here is the call graph for this function: Here is the caller graph for this function:Initialize the filters.
Definition at line 1273 of file oneloop_andi.c.
References accely_filt, airspeed_filt, notch_axis_t::bandwidth, filt_veloc_D, filt_veloc_E, filt_veloc_N, notch_axis_t::filter, foo, notch_axis_t::freq, init_butterworth_2_low_pass(), notch_filter_init(), oneloop_andi_filt_cutoff, oneloop_andi_filt_cutoff_v, oneloop_notch, Oneloop_notch_t::pitch, Oneloop_notch_t::roll, and Oneloop_notch_t::yaw.
Referenced by oneloop_andi_enter(), and oneloop_andi_init().
Here is the call graph for this function: Here is the caller graph for this function:Initialize Position of Poles.
Definition at line 1047 of file oneloop_andi.c.
References act_dynamics, ec_poles(), foo, PolePlacement::omega_n, PolePlacement::p3, p_alt_e, p_alt_rm, p_att_e, p_att_rm, p_head_e, p_head_rm, p_pos_e, p_pos_rm, w_approx(), and PolePlacement::zeta.
Referenced by oneloop_andi_init().
Here is the call graph for this function: Here is the caller graph for this function:Initialize Position of Poles.
Definition at line 1030 of file oneloop_andi.c.
References ec_poles(), foo, PolePlacement::omega_n, p_att_e, p_att_rm, p_head_e, and p_head_rm.
Referenced by init_controller().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1035 of file oneloop_andi.c.
References act_dynamics, ec_poles(), foo, PolePlacement::omega_n, PolePlacement::p3, p_alt_e, p_alt_rm, p_att_rm, p_pos_e, p_pos_rm, and w_approx().
Referenced by init_controller().
Here is the call graph for this function: Here is the caller graph for this function:Integrate in time 3D array.
Definition at line 694 of file oneloop_andi.c.
References foo.
Referenced by rm_1st_pos(), rm_2nd_pos(), rm_3rd_attitude(), and rm_3rd_pos().
Here is the caller graph for this function:Error Controller Gain Design.
Definition at line 592 of file oneloop_andi.c.
References positive_non_zero().
Referenced by init_controller().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 604 of file oneloop_andi.c.
References positive_non_zero().
Referenced by init_controller().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 598 of file oneloop_andi.c.
References positive_non_zero().
Referenced by init_controller().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 610 of file oneloop_andi.c.
References positive_non_zero().
Referenced by init_controller().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 617 of file oneloop_andi.c.
References positive_non_zero().
Referenced by init_controller().
Here is the call graph for this function: Here is the caller graph for this function:Reference Model Gain Design.
Definition at line 626 of file oneloop_andi.c.
References positive_non_zero().
Referenced by init_controller().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 633 of file oneloop_andi.c.
References positive_non_zero().
Referenced by init_controller().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 640 of file oneloop_andi.c.
References positive_non_zero().
Referenced by init_controller().
Here is the call graph for this function: Here is the caller graph for this function:Function to normalize the pseudo control vector.
Definition at line 1960 of file oneloop_andi.c.
References ANDI_OUTPUTS, nu, nu_n, ratio_vn_v, WLS_t::v, and WLS_one_p.
Referenced by oneloop_andi_run().
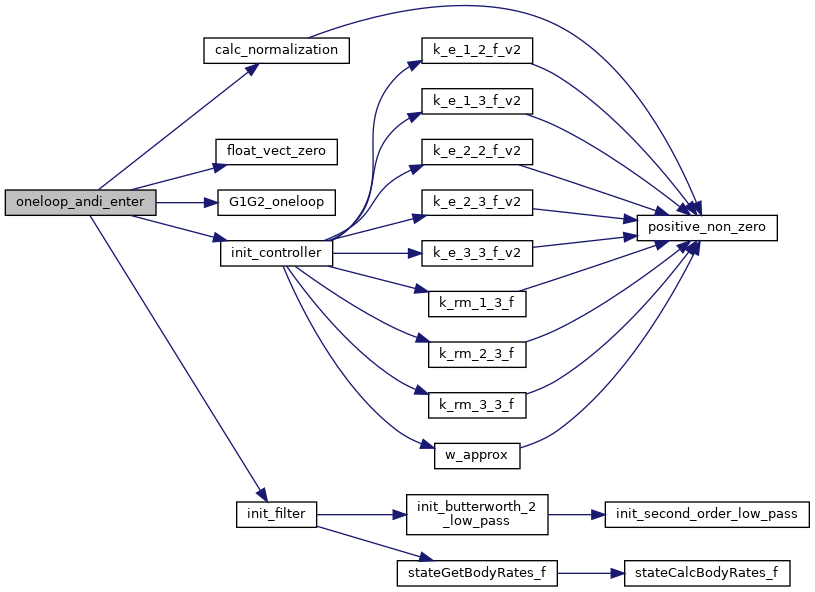
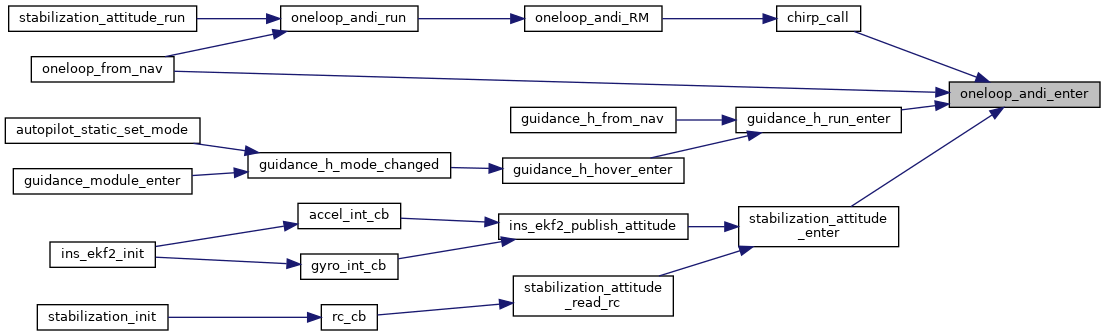
Here is the caller graph for this function:Function that resets important values upon engaging Oneloop ANDI.
FIXME: Ideally we should distinguish between the "stabilization" and "guidance" needs because it is unlikely to switch stabilization in flight, and there are multiple modes that use (the same) stabilization. Resetting the controller is not so nice when you are flying.
Definition at line 1455 of file oneloop_andi.c.
References ANDI_OUTPUTS, OneloopStabilizationRef::att, OneloopStabilizationRef::att_2d, OneloopStabilizationRef::att_3d, OneloopStabilizationRef::att_d, bwls_1l, calc_normalization(), OneloopGeneral::ctrl_type, EFF_MAT_G, ele_min, eulers_zxy, eulers_zxy_des, float_vect_zero(), foo, G1G2_oneloop(), OneloopGeneral::half_loop, init_controller(), init_filter(), nav_target, nav_target_new, oneloop_andi, FloatEulers::phi, FloatEulers::psi, psi_des_deg, psi_des_rad, reinit_all_cf(), OneloopGeneral::sta_ref, and FloatEulers::theta.
Referenced by chirp_call(), guidance_h_run_enter(), oneloop_from_nav(), and stabilization_attitude_enter().
Here is the call graph for this function: Here is the caller graph for this function:Init function of Oneloop ANDI controller
Definition at line 1400 of file oneloop_andi.c.
References act_dynamics, actuator_state_1l, andi_du, andi_du_n, ANDI_NUM_ACT, ANDI_NUM_ACT_TOT, ANDI_OUTPUTS, andi_u, OneloopStabilizationRef::att, OneloopStabilizationRef::att_2d, OneloopStabilizationRef::att_3d, OneloopStabilizationRef::att_d, bwls_1l, calc_normalization(), CTRL_ANDI, OneloopGeneral::ctrl_type, DefaultPeriodic, EFF_MAT_G, eulers_zxy_des, float_vect_zero(), foo, G1G2_oneloop(), OneloopGeneral::half_loop, init_all_cf(), init_controller(), init_filter(), init_poles(), nav_target, nav_target_new, nu, nu_n, oneloop_andi, FloatEulers::phi, positive_non_zero(), FloatEulers::psi, register_periodic_telemetry(), send_eff_mat_guid_oneloop_andi(), send_eff_mat_stab_oneloop_andi(), send_guidance_oneloop_andi(), send_oneloop_andi(), send_oneloop_debug(), send_wls_u_oneloop(), send_wls_v_oneloop(), OneloopGeneral::sta_ref, and FloatEulers::theta.
Here is the call graph for this function:Propagate the filters.
Definition at line 1312 of file oneloop_andi.c.
References ACCEL_FLOAT_OF_BFP, accely_filt, airspeed_filt, Oneloop_CF_t::ax, Oneloop_CF_t::ay, Oneloop_CF_t::az, calc_model(), cf, CF4_t::feedback, CF2_t::feedback, CF4_t::feedback_filt, CF2_t::feedback_filt, filt_veloc_D, filt_veloc_E, filt_veloc_N, notch_axis_t::filter, foo, Butterworth4LowPass::lp2, CF4_t::model, CF2_t::model, CF4_t::model_filt, CF2_t::model_filt, notch_filter_update(), SecondOrderLowPass::o, oneloop_notch, CF4_t::out, CF2_t::out, Oneloop_CF_t::p, Oneloop_CF_t::p_dot, Oneloop_notch_t::pitch, Oneloop_CF_t::q, Oneloop_CF_t::q_dot, Oneloop_CF_t::r, Oneloop_CF_t::r_dot, reinit_all_cf(), Oneloop_notch_t::roll, stateGetAccelBody_i(), stateGetAccelNed_f(), stateGetAirspeed_f(), stateGetBodyRates_f(), stateGetSpeedNed_f(), update_butterworth_2_low_pass(), update_butterworth_4_low_pass(), NedCoor_f::x, NedCoor_f::y, Oneloop_notch_t::yaw, and NedCoor_f::z.
Referenced by oneloop_andi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void oneloop_andi_RM | ( | bool | half_loop, |
| struct FloatVect3 | PSA_des, | ||
| int | rm_order_h, | ||
| int | rm_order_v, | ||
| bool | in_flight_oneloop | ||
| ) |
Function to generate the reference signals for the oneloop controller.
| half_loop | In half-loop mode the controller is used for stabilization only |
| PSA_des | Desired position/speed/acceleration |
| rm_order_h | Order of the reference model for horizontal guidance |
| rm_order_v | Order of the reference model for vertical guidance |
Definition at line 1491 of file oneloop_andi.c.
References A_chirp, a_thrust, OneloopGuidanceRef::acc, OneloopGuidanceState::acc, actuator_state_1l, ANDI_NUM_ACT, OneloopStabilizationRef::att, OneloopStabilizationRef::att_2d, OneloopStabilizationRef::att_3d, OneloopStabilizationRef::att_d, bwls_1l, chirp_axis, chirp_call(), chirp_first_call, chirp_on, dt_1l, eulers_zxy, eulers_zxy_des, f0_chirp, f1_chirp, float_vect_copy(), float_vect_norm(), float_vect_zero(), foo, OneloopGeneral::gui_ref, OneloopGeneral::gui_state, heading_manual, OneloopGuidanceRef::jer, Gains3rdOrder::k1, Gains3rdOrder::k2, Gains3rdOrder::k3, k_att_rm, k_pos_rm, max_a_nav, max_j_ang, max_j_nav, MAX_PPRZ, max_r, max_v_nav, max_v_nav_v, nav_target, nav_target_new, oneloop_andi, ONELOOP_ANDI_MAX_PHI, ONELOOP_ANDI_MAX_THETA, oneloop_andi_sideslip(), p_ref_0, FloatEulers::phi, OneloopGuidanceRef::pos, OneloopGuidanceState::pos, FloatEulers::psi, psi_des_deg, psi_des_rad, psi_vec, radio_control_get(), RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, RADIO_YAW, ratio_u_un, ratio_vn_v, reshape_wind(), rm_1st_pos(), rm_2nd_pos(), rm_3rd_attitude(), rm_3rd_pos(), RW_aD, OneloopGeneral::sta_ref, t_0_chirp, t_chirp, FloatEulers::theta, time_elapsed_chirp, use_increment, OneloopGuidanceRef::vel, OneloopGuidanceState::vel, WLS_one_p, WLS_t::Wv, Wv_backup, and yaw_stick_in_auto.
Referenced by oneloop_andi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void oneloop_andi_run | ( | bool | in_flight, |
| bool | half_loop, | ||
| struct FloatVect3 | PSA_des, | ||
| int | rm_order_h, | ||
| int | rm_order_v | ||
| ) |
Main function that runs the controller and performs control allocation.
| half_loop | In half-loop mode the controller is used for stabilization only |
| in_flight | The drone is in flight |
| PSA_des | Desired position/speed/acceleration |
| rm_order_h | Order of the reference model for horizontal guidance |
| rm_order_v | Order of the reference model for vertical guidance |
Definition at line 1628 of file oneloop_andi.c.
References a_thrust, OneloopGuidanceRef::acc, OneloopGuidanceState::acc, act_dynamics, act_max, act_min, actuator_state_1l, andi_du, andi_du_n, ANDI_NUM_ACT, ANDI_NUM_ACT_TOT, ANDI_OUTPUTS, andi_u, AP_MODE_ATTITUDE_DIRECT, OneloopStabilizationRef::att, OneloopStabilizationState::att, OneloopStabilizationRef::att_2d, OneloopStabilizationState::att_2d, OneloopStabilizationRef::att_3d, OneloopStabilizationRef::att_d, OneloopStabilizationState::att_d, autopilot, Oneloop_CF_t::ax, Oneloop_CF_t::ay, Oneloop_CF_t::az, bwls_1l, calc_normalization(), cf, chirp_on, Stabilization::cmd, commands, CTRL_ANDI, CTRL_INDI, ctrl_off, OneloopGeneral::ctrl_type, RW_skew::deg, ec_3rd(), ec_3rd_att(), ec_3rd_pos(), EFF_MAT_G, RW_Model::ele_pref, eulers_zxy, eulers_zxy_des, rotwing_state_t::fail_pusher_motor, filt_veloc_D, filt_veloc_E, filt_veloc_N, float_eulers_of_quat_zxy(), float_vect_copy(), float_vect_sum(), foo, G1G2_oneloop(), g2_ff, G2_RW, get_act_state_oneloop(), OneloopGeneral::gui_ref, OneloopGeneral::gui_state, heading_manual, rotwing_state_t::hover_motors_enabled, init_controller(), OneloopGuidanceRef::jer, Gains3rdOrder::k1, Gains3rdOrder::k2, Gains3rdOrder::k3, k_att_e, k_att_e_indi, k_pos_e, k_pos_e_indi, max_a_nav, max_j_ang, max_j_nav, MAX_PPRZ, max_v_nav, pprz_autopilot::mode, normalize_nu(), nu, num_thrusters_oneloop, SecondOrderLowPass::o, oneloop_andi, ONELOOP_ANDI_DEBUG_MODE, ONELOOP_ANDI_MAX_PHI, ONELOOP_ANDI_MAX_THETA, oneloop_andi_propagate_filters(), oneloop_andi_RM(), CF4_t::out, CF2_t::out, Oneloop_CF_t::p, Oneloop_CF_t::p_dot, FloatEulers::phi, pitch_pref, OneloopGuidanceRef::pos, OneloopGuidanceState::pos, FloatEulers::psi, psi_des_deg, psi_des_rad, Oneloop_CF_t::q, Oneloop_CF_t::q_dot, Oneloop_CF_t::r, Oneloop_CF_t::r_dot, RADIO_AUX4, RADIO_AUX5, radio_control, ratio_u_un, rotwing_state, RW, RW_Model::skew, OneloopGeneral::sta_ref, OneloopGeneral::sta_state, stabilization, stateGetNedToBodyQuat_f(), stateGetPositionNed_f(), FloatEulers::theta, theta_pref_max, pprz_autopilot::throttle, WLS_t::u, WLS_t::u_max, WLS_t::u_min, u_pref, WLS_t::u_pref, use_increment, RadioControl::values, OneloopGuidanceRef::vel, OneloopGuidanceState::vel, wls_alloc(), WLS_one_p, WLS_t::Wu, Wu_backup, Wu_quad_motors_fwd, NedCoor_f::x, NedCoor_f::y, and NedCoor_f::z.
Referenced by guidance_oneloop_run_mode(), oneloop_from_nav(), and stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:Function to calculate corrections for sideslip.
Definition at line 2041 of file oneloop_andi.c.
References accely_filt, airspeed_filt, eulers_zxy, foo, fwd_sideslip_gain, g, SecondOrderLowPass::o, ONELOOP_ANDI_MAX_BANK, FloatEulers::phi, and FloatEulers::theta.
Referenced by oneloop_andi_RM().
Here is the caller graph for this function:Function that maps navigation inputs to the oneloop controller for the generated autopilot.
Definition at line 2003 of file oneloop_andi.c.
References RotorcraftNavigation::climb, OneloopGeneral::ctrl_type, foo, nav, RotorcraftNavigation::nav_altitude, NAV_SETPOINT_MODE_POS, NAV_SETPOINT_MODE_SPEED, NAV_VERTICAL_MODE_ALT, NAV_VERTICAL_MODE_CLIMB, oneloop_andi, oneloop_andi_enter(), oneloop_andi_run(), POS_BFP_OF_REAL, POS_FLOAT_OF_BFP, RotorcraftNavigation::setpoint_mode, RotorcraftNavigation::speed, SPEED_BFP_OF_REAL, SPEED_FLOAT_OF_BFP, stateGetPositionNed_f(), RotorcraftNavigation::target, RotorcraftNavigation::vertical_mode, FloatVect3::x, NedCoor_f::x, EnuCoor_f::x, NedCoor_f::y, EnuCoor_f::y, and NedCoor_f::z.
Here is the call graph for this function:Function to make sure that inputs are positive non zero vaues.
Definition at line 582 of file oneloop_andi.c.
References foo.
Referenced by acc_body_bound(), calc_normalization(), chirp_pos(), ec_poles(), k_e_1_2_f_v2(), k_e_1_3_f_v2(), k_e_2_2_f_v2(), k_e_2_3_f_v2(), k_e_3_3_f_v2(), k_rm_1_3_f(), k_rm_2_3_f(), k_rm_3_3_f(), oneloop_andi_init(), vect_bound_nd(), and w_approx().
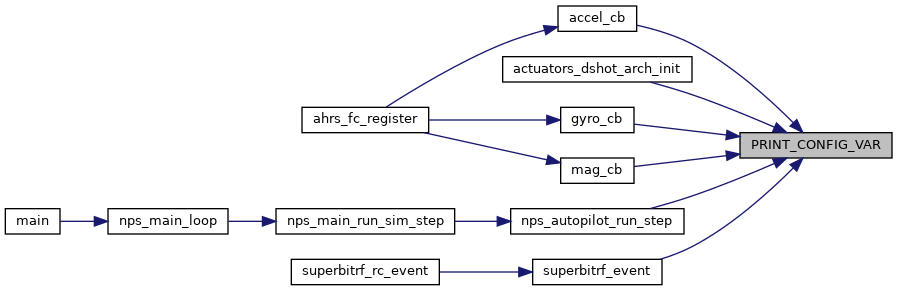
Here is the caller graph for this function:| PRINT_CONFIG_VAR | ( | ONELOOP_ANDI_FILT_CUTOFF | ) |
Referenced by accel_cb(), accel_cb(), accel_cb(), actuators_dshot_arch_init(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), gyro_cb(), mag_cb(), mag_cb(), nps_autopilot_run_step(), and superbitrf_event().
Here is the caller graph for this function:| PRINT_CONFIG_VAR | ( | ONELOOP_ANDI_FILT_CUTOFF_P | ) |
| PRINT_CONFIG_VAR | ( | ONELOOP_ANDI_FILT_CUTOFF_Q | ) |
| PRINT_CONFIG_VAR | ( | ONELOOP_ANDI_FILT_CUTOFF_R | ) |
Reinitialize all the Complementary Filters.
Definition at line 1260 of file oneloop_andi.c.
References Oneloop_CF_t::ax, Oneloop_CF_t::ay, Oneloop_CF_t::az, cf, foo, Oneloop_CF_t::p, Oneloop_CF_t::p_dot, Oneloop_CF_t::q, Oneloop_CF_t::q_dot, Oneloop_CF_t::r, Oneloop_CF_t::r_dot, reinit_cf2(), and reinit_cf4().
Referenced by oneloop_andi_enter(), and oneloop_andi_propagate_filters().
Here is the call graph for this function: Here is the caller graph for this function:Reinitialize 2nd Order CF if new frequency setting or if forced.
Definition at line 1242 of file oneloop_andi.c.
References cf, foo, get_butterworth_2_low_pass(), and init_butterworth_2_low_pass().
Referenced by reinit_all_cf().
Here is the call graph for this function: Here is the caller graph for this function:Reinitialize 4th Order CF if new frequency setting or if forced.
Definition at line 1251 of file oneloop_andi.c.
References cf, foo, get_butterworth_4_low_pass(), and init_butterworth_4_low_pass().
Referenced by reinit_all_cf().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 2189 of file oneloop_andi.c.
References acc_body_bound(), airspeed_filt, eulers_zxy, FLOAT_ANGLE_NORMALIZE, FLOAT_VECT2_NORM, foo, force_forward, gi_unbounded_airspeed_sp, OneloopGeneral::gui_state, Gains3rdOrder::k2, k_pos_rm, max_a_nav, max_as, min_as, nav_target, nav_target_new, SecondOrderLowPass::o, oneloop_andi, ONELOOP_ANDI_AIRSPEED_SWITCH_THRESHOLD, FloatEulers::psi, VECT2_DIFF, vect_bound_nd(), and OneloopGuidanceState::vel.
Referenced by oneloop_andi_RM().
Here is the call graph for this function: Here is the caller graph for this function:| void rm_1st_pos | ( | float | dt, |
| float | x_2d_ref[], | ||
| float | x_3d_ref[], | ||
| float | x_2d_des[], | ||
| float | k3_rm[], | ||
| float | x_3d_bound, | ||
| int | n | ||
| ) |
Reference Model Definition for 3rd order system specific to positioning with bounds.
| dt | Delta time [s] |
| x_2d_ref | Reference signal 3rd order |
| x_3d_ref | Reference signal 4th order |
| x_2d_des | Desired 3rd order signal |
| k3_rm | Reference Model Gain 3rd order signal |
| x_3d_bound | Bound for the 4th order reference signal |
| n | Number of dimensions |
Definition at line 900 of file oneloop_andi.c.
References err_nd(), float_vect_copy(), foo, integrate_nd(), and vect_bound_nd().
Referenced by oneloop_andi_RM().
Here is the call graph for this function: Here is the caller graph for this function:| void rm_2nd | ( | float | dt, |
| float * | x_ref, | ||
| float * | x_d_ref, | ||
| float * | x_2d_ref, | ||
| float | x_des, | ||
| float | k1_rm, | ||
| float | k2_rm | ||
| ) |
Reference Model Definition for 2nd order system.
| dt | Delta time [s] |
| x_ref | Reference signal 1st order |
| x_d_ref | Reference signal 2nd order |
| x_2d_ref | Reference signal 3rd order |
| x_3d_ref | Reference signal 4th order |
| x_des | Desired 1st order signal |
| k1_rm | Reference Model Gain 1st order signal |
| k2_rm | Reference Model Gain 2nd order signal |
| k3_rm | Reference Model Gain 3rd order signal |
Definition at line 921 of file oneloop_andi.c.
References foo.
| void rm_2nd_pos | ( | float | dt, |
| float | x_d_ref[], | ||
| float | x_2d_ref[], | ||
| float | x_3d_ref[], | ||
| float | x_d_des[], | ||
| float | k2_rm[], | ||
| float | k3_rm[], | ||
| float | x_2d_bound, | ||
| float | x_3d_bound, | ||
| int | n | ||
| ) |
Reference Model Definition for 3rd order system specific to positioning with bounds.
| dt | Delta time [s] |
| x_d_ref | Reference signal 2nd order |
| x_2d_ref | Reference signal 3rd order |
| x_3d_ref | Reference signal 4th order |
| x_d_des | Desired 2nd order signal |
| k2_rm | Reference Model Gain 2nd order signal |
| k3_rm | Reference Model Gain 3rd order signal |
| x_2d_bound | Bound for the 3rd order reference signal |
| x_3d_bound | Bound for the 4th order reference signal |
| n | Number of dimensions |
Definition at line 878 of file oneloop_andi.c.
References err_nd(), float_vect_copy(), foo, integrate_nd(), and vect_bound_nd().
Referenced by oneloop_andi_RM().
Here is the call graph for this function: Here is the caller graph for this function:| void rm_3rd | ( | float | dt, |
| float * | x_ref, | ||
| float * | x_d_ref, | ||
| float * | x_2d_ref, | ||
| float * | x_3d_ref, | ||
| float | x_des, | ||
| float | k1_rm, | ||
| float | k2_rm, | ||
| float | k3_rm | ||
| ) |
Reference Model Definition for 3rd order system.
| dt | Delta time [s] |
| x_ref | Reference signal 1st order |
| x_d_ref | Reference signal 2nd order |
| x_2d_ref | Reference signal 3rd order |
| x_3d_ref | Reference signal 4th order |
| x_des | Desired 1st order signal |
| k1_rm | Reference Model Gain 1st order signal |
| k2_rm | Reference Model Gain 2nd order signal |
| k3_rm | Reference Model Gain 3rd order signal |
Definition at line 798 of file oneloop_andi.c.
References foo.
| void rm_3rd_attitude | ( | float | dt, |
| float | x_ref[3], | ||
| float | x_d_ref[3], | ||
| float | x_2d_ref[3], | ||
| float | x_3d_ref[3], | ||
| float | x_des[3], | ||
| bool | ow_psi, | ||
| float | psi_overwrite[4], | ||
| float | k1_rm[3], | ||
| float | k2_rm[3], | ||
| float | k3_rm[3], | ||
| float | max_ang_jerk | ||
| ) |
Reference Model Definition for 3rd order system with attitude conversion functions.
| dt | Delta time [s] |
| x_ref | Reference signal 1st order |
| x_d_ref | Reference signal 2nd order |
| x_2d_ref | Reference signal 3rd order |
| x_3d_ref | Reference signal 4th order |
| x_des | Desired 1st order signal |
| ow_psi | Overwrite psi (for navigation functions) [bool] |
| psi_overwrite | Overwrite psi (for navigation functions) [values] |
| k1_rm | Reference Model Gain 1st order signal |
| k2_rm | Reference Model Gain 2nd order signal |
| k3_rm | Reference Model Gain 3rd order signal |
Definition at line 757 of file oneloop_andi.c.
References err_nd(), float_euler_dot_of_rates_vec(), float_rates_of_euler_dot_vec(), float_vect_copy(), foo, integrate_nd(), and vect_bound_nd().
Referenced by oneloop_andi_RM().
Here is the call graph for this function: Here is the caller graph for this function:| void rm_3rd_head | ( | float | dt, |
| float * | x_ref, | ||
| float * | x_d_ref, | ||
| float * | x_2d_ref, | ||
| float * | x_3d_ref, | ||
| float | x_des, | ||
| float | k1_rm, | ||
| float | k2_rm, | ||
| float | k3_rm | ||
| ) |
Reference Model Definition for 3rd order system specific to the heading angle.
| dt | Delta time [s] |
| x_ref | Reference signal 1st order |
| x_d_ref | Reference signal 2nd order |
| x_2d_ref | Reference signal 3rd order |
| x_3d_ref | Reference signal 4th order |
| x_des | Desired 1st order signal |
| k1_rm | Reference Model Gain 1st order signal |
| k2_rm | Reference Model Gain 2nd order signal |
| k3_rm | Reference Model Gain 3rd order signal |
Definition at line 820 of file oneloop_andi.c.
References foo.
| void rm_3rd_pos | ( | float | dt, |
| float | x_ref[], | ||
| float | x_d_ref[], | ||
| float | x_2d_ref[], | ||
| float | x_3d_ref[], | ||
| float | x_des[], | ||
| float | k1_rm[], | ||
| float | k2_rm[], | ||
| float | k3_rm[], | ||
| float | x_d_bound, | ||
| float | x_2d_bound, | ||
| float | x_3d_bound, | ||
| int | n | ||
| ) |
Reference Model Definition for 3rd order system specific to positioning with bounds.
| dt | Delta time [s] |
| x_ref | Reference signal 1st order |
| x_d_ref | Reference signal 2nd order |
| x_2d_ref | Reference signal 3rd order |
| x_3d_ref | Reference signal 4th order |
| x_des | Desired 1st order signal |
| k1_rm | Reference Model Gain 1st order signal |
| k2_rm | Reference Model Gain 2nd order signal |
| k3_rm | Reference Model Gain 3rd order signal |
| x_d_bound | Bound for the 2nd order reference signal |
| x_2d_bound | Bound for the 3rd order reference signal |
| x_3d_bound | Bound for the 4th order reference signal |
| n | Number of dimensions |
Definition at line 848 of file oneloop_andi.c.
References bound_v_from_a(), err_nd(), float_vect_copy(), foo, integrate_nd(), and vect_bound_nd().
Referenced by oneloop_andi_RM().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 505 of file oneloop_andi.c.
References ANDI_NUM_ACT_TOT, dev, EFF_MAT_RW, and foo.
Referenced by oneloop_andi_init().
Here is the caller graph for this function:
|
static |
Definition at line 495 of file oneloop_andi.c.
References ANDI_NUM_ACT, dev, EFF_MAT_RW, and foo.
Referenced by oneloop_andi_init().
Here is the caller graph for this function:
|
static |
Definition at line 532 of file oneloop_andi.c.
References OneloopGuidanceRef::acc, OneloopGuidanceState::acc, dev, foo, OneloopGeneral::gui_ref, OneloopGeneral::gui_state, OneloopGuidanceRef::jer, oneloop_andi, OneloopGuidanceRef::pos, OneloopGuidanceState::pos, OneloopGuidanceRef::vel, and OneloopGuidanceState::vel.
Referenced by oneloop_andi_init().
Here is the caller graph for this function:
|
static |
Definition at line 512 of file oneloop_andi.c.
References actuator_state_1l, ANDI_NUM_ACT, OneloopStabilizationRef::att, OneloopStabilizationState::att, OneloopStabilizationRef::att_2d, OneloopStabilizationState::att_2d, OneloopStabilizationRef::att_3d, OneloopStabilizationRef::att_d, OneloopStabilizationState::att_d, dev, eulers_zxy_des, foo, oneloop_andi, FloatEulers::phi, FloatEulers::psi, OneloopGeneral::sta_ref, OneloopGeneral::sta_state, and FloatEulers::theta.
Referenced by oneloop_andi_init().
Here is the caller graph for this function:
|
static |
Definition at line 565 of file oneloop_andi.c.
References Oneloop_CF_t::ax, Oneloop_CF_t::ay, Oneloop_CF_t::az, cf, debug_vect(), dev, foo, CF4_t::model, CF2_t::model, Oneloop_CF_t::p, Oneloop_CF_t::p_dot, Oneloop_CF_t::q, Oneloop_CF_t::q_dot, Oneloop_CF_t::r, and Oneloop_CF_t::r_dot.
Referenced by oneloop_andi_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 491 of file oneloop_andi.c.
References dev, send_wls_u(), and WLS_one_p.
Referenced by oneloop_andi_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 487 of file oneloop_andi.c.
References dev, send_wls_v(), and WLS_one_p.
Referenced by oneloop_andi_init().
Here is the call graph for this function: Here is the caller graph for this function:Scale a 3D array to within a 3D bound.
Definition at line 703 of file oneloop_andi.c.
References float_vect_norm(), foo, positive_non_zero(), and scale.
Referenced by ec_3rd_att(), ec_3rd_pos(), reshape_wind(), rm_1st_pos(), rm_2nd_pos(), rm_3rd_attitude(), and rm_3rd_pos().
Here is the call graph for this function: Here is the caller graph for this function:Third Order to First Order Dynamics Approximation.
| p1 | Pole 1 |
| p2 | Pole 2 |
| p3 | Pole 3 |
| rm_k | Reference Model Gain |
Definition at line 1001 of file oneloop_andi.c.
References foo, and positive_non_zero().
Referenced by init_controller(), init_poles(), and init_poles_pos().
Here is the call graph for this function: Here is the caller graph for this function:| float A_chirp = 1.0 |
Definition at line 427 of file oneloop_andi.c.
Referenced by oneloop_andi_RM().
|
static |
Definition at line 353 of file oneloop_andi.c.
Referenced by oneloop_andi_RM(), and oneloop_andi_run().
|
static |
Definition at line 462 of file oneloop_andi.c.
Referenced by init_filter(), oneloop_andi_propagate_filters(), and oneloop_andi_sideslip().
| float act_dynamics[ANDI_NUM_ACT_TOT] = = {1} |
Definition at line 178 of file oneloop_andi.c.
Referenced by calc_normalization(), G1G2_oneloop(), init_controller(), init_poles(), init_poles_pos(), oneloop_andi_init(), and oneloop_andi_run().
|
static |
Definition at line 351 of file oneloop_andi.c.
Referenced by calc_normalization(), and get_act_state_oneloop().
| float act_max[ANDI_NUM_ACT_TOT] = = {MAX_PPRZ} |
Definition at line 184 of file oneloop_andi.c.
Referenced by calc_normalization(), compute_wls_u_scaler(), compute_wls_upper_bounds(), get_act_state_oneloop(), and oneloop_andi_run().
| float act_max_norm[ANDI_NUM_ACT_TOT] = = {1.0} |
Definition at line 196 of file oneloop_andi.c.
Referenced by calc_normalization().
| float act_min[ANDI_NUM_ACT_TOT] = = {0.0} |
Definition at line 190 of file oneloop_andi.c.
Referenced by calc_normalization(), compute_wls_lower_bounds(), compute_wls_u_scaler(), get_act_state_oneloop(), and oneloop_andi_run().
| float act_min_norm[ANDI_NUM_ACT_TOT] = = {0.0} |
Definition at line 202 of file oneloop_andi.c.
Referenced by calc_normalization().
| bool actuator_is_servo[ANDI_NUM_ACT_TOT] = {0} |
Definition at line 171 of file oneloop_andi.c.
| float actuator_state_1l[ANDI_NUM_ACT] |
Definition at line 352 of file oneloop_andi.c.
Referenced by calc_G1_G2_RW(), calc_model(), get_act_state_oneloop(), oneloop_andi_init(), oneloop_andi_RM(), oneloop_andi_run(), and send_oneloop_andi().
|
static |
Definition at line 463 of file oneloop_andi.c.
Referenced by G1G2_oneloop(), init_filter(), oneloop_andi_propagate_filters(), oneloop_andi_sideslip(), and reshape_wind().
| float andi_du[ANDI_NUM_ACT_TOT] |
Definition at line 347 of file oneloop_andi.c.
Referenced by oneloop_andi_init(), and oneloop_andi_run().
|
static |
Definition at line 348 of file oneloop_andi.c.
Referenced by oneloop_andi_init(), and oneloop_andi_run().
| float andi_u[ANDI_NUM_ACT_TOT] |
Definition at line 346 of file oneloop_andi.c.
Referenced by get_act_state_oneloop(), oneloop_andi_init(), and oneloop_andi_run().
| float* bwls_1l[ANDI_OUTPUTS] |
Definition at line 453 of file oneloop_andi.c.
Referenced by oneloop_andi_enter(), oneloop_andi_init(), oneloop_andi_RM(), and oneloop_andi_run().
| struct Oneloop_CF_t cf |
Definition at line 416 of file oneloop_andi.c.
Referenced by calc_model(), init_all_cf(), init_cf2(), init_cf4(), oneloop_andi_propagate_filters(), oneloop_andi_run(), reinit_all_cf(), reinit_cf2(), reinit_cf4(), and send_oneloop_debug().
| int8_t chirp_axis = 0 |
Definition at line 428 of file oneloop_andi.c.
Referenced by oneloop_andi_RM().
Definition at line 421 of file oneloop_andi.c.
Referenced by chirp_call(), and oneloop_andi_RM().
Definition at line 420 of file oneloop_andi.c.
Referenced by chirp_call(), oneloop_andi_RM(), and oneloop_andi_run().
Definition at line 376 of file oneloop_andi.c.
Referenced by G1G2_oneloop(), and oneloop_andi_run().
|
static |
Definition at line 339 of file oneloop_andi.c.
Referenced by calc_normalization(), and oneloop_andi_RM().
| float EFF_MAT_G[ANDI_OUTPUTS][ANDI_NUM_ACT_TOT] |
Definition at line 454 of file oneloop_andi.c.
Referenced by G1G2_oneloop(), oneloop_andi_enter(), oneloop_andi_init(), and oneloop_andi_run().
| struct FloatEulers eulers_zxy |
Definition at line 360 of file oneloop_andi.c.
Referenced by calc_model(), oneloop_andi_enter(), oneloop_andi_RM(), oneloop_andi_run(), oneloop_andi_sideslip(), and reshape_wind().
| struct FloatEulers eulers_zxy_des |
Definition at line 359 of file oneloop_andi.c.
Referenced by oneloop_andi_enter(), oneloop_andi_init(), oneloop_andi_RM(), oneloop_andi_run(), and send_oneloop_andi().
Definition at line 424 of file oneloop_andi.c.
Referenced by oneloop_andi_RM().
Definition at line 425 of file oneloop_andi.c.
Referenced by oneloop_andi_RM().
|
static |
Definition at line 461 of file oneloop_andi.c.
Referenced by init_filter(), oneloop_andi_propagate_filters(), and oneloop_andi_run().
|
static |
Definition at line 460 of file oneloop_andi.c.
Referenced by init_filter(), oneloop_andi_propagate_filters(), and oneloop_andi_run().
|
static |
Definition at line 459 of file oneloop_andi.c.
Referenced by init_filter(), oneloop_andi_propagate_filters(), and oneloop_andi_run().
| float fwd_sideslip_gain = 0.2 |
Definition at line 280 of file oneloop_andi.c.
Referenced by oneloop_andi_sideslip().
|
static |
Definition at line 340 of file oneloop_andi.c.
Referenced by calc_model(), image_calculate_g(), ins_flow_update(), light_ws2812_arch_set(), oneloop_andi_sideslip(), pprz_circfit_wei_float(), send_ins_flow(), snake_gate_detection(), xgeqrf(), and xgeqrf_f().
|
static |
Definition at line 354 of file oneloop_andi.c.
Referenced by oneloop_andi_run().
| float gi_unbounded_airspeed_sp = 0.0 |
Definition at line 343 of file oneloop_andi.c.
Referenced by reshape_wind().
Definition at line 369 of file oneloop_andi.c.
Referenced by oneloop_andi_RM(), and oneloop_andi_run().
| float k_as = 2.0 |
Definition at line 341 of file oneloop_andi.c.
| struct Gains3rdOrder k_att_e |
Definition at line 444 of file oneloop_andi.c.
Referenced by init_controller(), and oneloop_andi_run().
| struct Gains3rdOrder k_att_e_indi |
Definition at line 449 of file oneloop_andi.c.
Referenced by init_controller(), and oneloop_andi_run().
| struct Gains3rdOrder k_att_rm |
Definition at line 445 of file oneloop_andi.c.
Referenced by generate_reference_attitude(), init_controller(), and oneloop_andi_RM().
| struct Gains3rdOrder k_pos_e |
Definition at line 446 of file oneloop_andi.c.
Referenced by init_controller(), and oneloop_andi_run().
| struct Gains3rdOrder k_pos_e_indi |
Definition at line 450 of file oneloop_andi.c.
Referenced by init_controller(), and oneloop_andi_run().
| struct Gains3rdOrder k_pos_rm |
Definition at line 447 of file oneloop_andi.c.
Referenced by init_controller(), oneloop_andi_RM(), and reshape_wind().
| float max_a_nav = 4.0 |
Definition at line 250 of file oneloop_andi.c.
Referenced by init_controller(), oneloop_andi_RM(), oneloop_andi_run(), and reshape_wind().
| float max_as = 19.0f |
Definition at line 270 of file oneloop_andi.c.
Referenced by guidance_set_min_max_airspeed(), and reshape_wind().
| float max_j_ang = 1000.0 |
Definition at line 262 of file oneloop_andi.c.
Referenced by calc_normalization(), oneloop_andi_RM(), and oneloop_andi_run().
| float max_j_nav = 500.0 |
Definition at line 256 of file oneloop_andi.c.
Referenced by calc_normalization(), oneloop_andi_RM(), and oneloop_andi_run().
Definition at line 163 of file oneloop_andi.c.
Referenced by attitude_ref_quat_int_set_max_r(), and oneloop_andi_RM().
| float max_v_nav = 5.0 |
Definition at line 268 of file oneloop_andi.c.
Referenced by init_controller(), oneloop_andi_RM(), and oneloop_andi_run().
| float max_v_nav_v = 1.5 |
Definition at line 276 of file oneloop_andi.c.
Referenced by oneloop_andi_RM().
| float min_as = 0.0f |
Definition at line 271 of file oneloop_andi.c.
Referenced by guidance_set_min_max_airspeed(), and reshape_wind().
|
static |
Definition at line 337 of file oneloop_andi.c.
Referenced by oneloop_andi_enter(), oneloop_andi_init(), oneloop_andi_RM(), and reshape_wind().
|
static |
Definition at line 338 of file oneloop_andi.c.
Referenced by oneloop_andi_enter(), oneloop_andi_init(), oneloop_andi_RM(), and reshape_wind().
| float nu[ANDI_OUTPUTS] |
Definition at line 349 of file oneloop_andi.c.
Referenced by control_error_attitude(), control_error_rate(), control_error_thrust(), normalize_nu(), oneloop_andi_init(), and oneloop_andi_run().
| float nu_n[ANDI_OUTPUTS] |
Definition at line 350 of file oneloop_andi.c.
Referenced by normalize_nu(), and oneloop_andi_init().
| float nu_norm_max = 1.0 |
Definition at line 208 of file oneloop_andi.c.
Referenced by calc_normalization().
| float num_thrusters_oneloop = 4.0 |
Definition at line 104 of file oneloop_andi.c.
Referenced by oneloop_andi_run().
| struct OneloopGeneral oneloop_andi |
Definition at line 333 of file oneloop_andi.c.
Referenced by chirp_call(), guidance_oneloop_run_mode(), oneloop_andi_enter(), oneloop_andi_init(), oneloop_andi_RM(), oneloop_andi_run(), oneloop_from_nav(), reshape_wind(), send_guidance_oneloop_andi(), send_oneloop_andi(), and stabilization_attitude_run().
| float oneloop_andi_filt_cutoff = 2.0 |
Definition at line 116 of file oneloop_andi.c.
Referenced by init_all_cf(), and init_filter().
| float oneloop_andi_filt_cutoff_a = 2.0 |
Definition at line 122 of file oneloop_andi.c.
Referenced by init_all_cf().
| float oneloop_andi_filt_cutoff_p = 20.0 |
Definition at line 141 of file oneloop_andi.c.
Referenced by init_all_cf().
| float oneloop_andi_filt_cutoff_pos = 2.0 |
Definition at line 134 of file oneloop_andi.c.
| float oneloop_andi_filt_cutoff_q = 20.0 |
Definition at line 148 of file oneloop_andi.c.
Referenced by init_all_cf().
| float oneloop_andi_filt_cutoff_r = 20.0 |
Definition at line 155 of file oneloop_andi.c.
Referenced by init_all_cf().
| float oneloop_andi_filt_cutoff_v = 2.0 |
Definition at line 128 of file oneloop_andi.c.
Referenced by init_filter().
|
static |
Definition at line 417 of file oneloop_andi.c.
Referenced by init_filter(), and oneloop_andi_propagate_filters().
| struct PolePlacement p_alt_e |
Definition at line 438 of file oneloop_andi.c.
Referenced by init_controller(), init_poles(), and init_poles_pos().
| struct PolePlacement p_alt_rm |
Definition at line 439 of file oneloop_andi.c.
Referenced by init_controller(), init_poles(), and init_poles_pos().
| struct PolePlacement p_att_e |
Definition at line 432 of file oneloop_andi.c.
Referenced by init_controller(), init_poles(), and init_poles_att().
| struct PolePlacement p_att_rm |
Definition at line 433 of file oneloop_andi.c.
Referenced by init_controller(), init_poles(), init_poles_att(), and init_poles_pos().
| struct PolePlacement p_head_e |
Definition at line 441 of file oneloop_andi.c.
Referenced by init_controller(), init_poles(), and init_poles_att().
| struct PolePlacement p_head_rm |
Definition at line 442 of file oneloop_andi.c.
Referenced by init_controller(), init_poles(), and init_poles_att().
| struct PolePlacement p_pos_e |
Definition at line 435 of file oneloop_andi.c.
Referenced by init_controller(), init_poles(), and init_poles_pos().
| struct PolePlacement p_pos_rm |
Definition at line 436 of file oneloop_andi.c.
Referenced by init_controller(), init_poles(), and init_poles_pos().
| float p_ref_0[3] = {0.0, 0.0, 0.0} |
Definition at line 429 of file oneloop_andi.c.
Referenced by chirp_call(), chirp_pos(), and oneloop_andi_RM().
|
static |
Definition at line 379 of file oneloop_andi.c.
Referenced by chirp_pos(), and oneloop_andi_run().
| float psi_des_deg = 0.0 |
Definition at line 363 of file oneloop_andi.c.
Referenced by oneloop_andi_enter(), oneloop_andi_RM(), and oneloop_andi_run().
| float psi_des_rad = 0.0 |
Definition at line 362 of file oneloop_andi.c.
Referenced by oneloop_andi_enter(), oneloop_andi_RM(), and oneloop_andi_run().
|
static |
Definition at line 364 of file oneloop_andi.c.
Referenced by oneloop_andi_RM().
| float ratio_u_un[ANDI_NUM_ACT_TOT] |
Definition at line 455 of file oneloop_andi.c.
Referenced by calc_normalization(), G1G2_oneloop(), oneloop_andi_RM(), and oneloop_andi_run().
| float ratio_vn_v[ANDI_OUTPUTS] |
Definition at line 456 of file oneloop_andi.c.
Referenced by calc_normalization(), G1G2_oneloop(), normalize_nu(), and oneloop_andi_RM().
| struct Int32Eulers stab_att_sp_euler_1l |
Definition at line 357 of file oneloop_andi.c.
| struct Int32Quat stab_att_sp_quat_1l |
Definition at line 358 of file oneloop_andi.c.
| float t_0_chirp = 0.0 |
Definition at line 423 of file oneloop_andi.c.
Referenced by oneloop_andi_RM().
| float t_chirp = 45.0 |
Definition at line 426 of file oneloop_andi.c.
Referenced by chirp_call(), chirp_pos(), and oneloop_andi_RM().
| int16_t temp_pitch = 0 |
Definition at line 342 of file oneloop_andi.c.
Referenced by indi_apply_actuator_models().
Definition at line 228 of file oneloop_andi.c.
Referenced by chirp_pos(), and oneloop_andi_run().
| float time_elapsed_chirp = 0.0 |
Definition at line 422 of file oneloop_andi.c.
Referenced by oneloop_andi_RM().
|
static |
Definition at line 214 of file oneloop_andi.c.
Referenced by oneloop_andi_run().
|
static |
Definition at line 336 of file oneloop_andi.c.
Referenced by oneloop_andi_RM(), and oneloop_andi_run().
| struct WLS_t WLS_one_p |
Definition at line 380 of file oneloop_andi.c.
Referenced by normalize_nu(), oneloop_andi_RM(), oneloop_andi_run(), send_wls_u_oneloop(), and send_wls_v_oneloop().
|
static |
Definition at line 412 of file oneloop_andi.c.
Referenced by oneloop_andi_run().
| float Wu_quad_motors_fwd = 6.0 |
Definition at line 286 of file oneloop_andi.c.
Referenced by oneloop_andi_run().
|
static |
Definition at line 406 of file oneloop_andi.c.
Referenced by oneloop_andi_RM().
Definition at line 374 of file oneloop_andi.c.
Referenced by oneloop_andi_RM().