|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Simple first order low pass filter with bilinear transform. More...
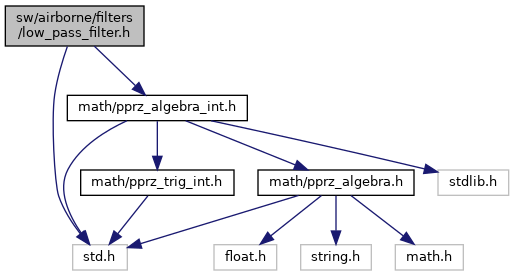
 Include dependency graph for low_pass_filter.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for low_pass_filter.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | FirstOrderLowPass |
| First order low pass filter structure. More... | |
| struct | SecondOrderLowPass |
| Second order low pass filter structure. More... | |
| struct | SecondOrderLowPass_int |
| struct | Butterworth4LowPass |
| Fourth order Butterworth low pass filter. More... | |
| struct | Butterworth4LowPass_int |
| Fourth order Butterworth low pass filter(fixed point version). More... | |
Macros | |
| #define | INT32_FILT_FRAC 8 |
Typedefs | |
| typedef struct SecondOrderLowPass | Butterworth2LowPass |
| Second order Butterworth low pass filter. | |
| typedef struct SecondOrderLowPass_int | Butterworth2LowPass_int |
| Second order Butterworth low pass filter(fixed point version). | |
Functions | |
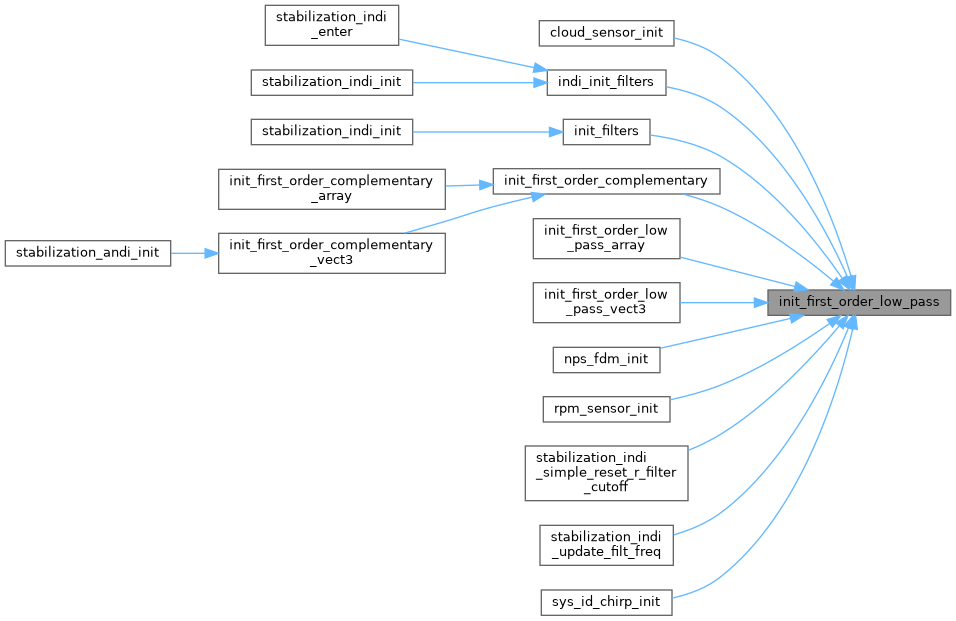
| static void | init_first_order_low_pass (struct FirstOrderLowPass *filter, float tau, const float sample_time, float value) |
| Init first order low pass filter. | |
| static float | update_first_order_low_pass (struct FirstOrderLowPass *filter, const float value) |
| Update first order low pass filter state with a new value. | |
| static float | reset_first_order_low_pass (struct FirstOrderLowPass *filter, const float value) |
| Reset the first order low-pass filter to a specific value. | |
| static float | get_first_order_low_pass (const struct FirstOrderLowPass *filter) |
| Get current value of the first order low pass filter. | |
| static void | update_first_order_low_pass_tau (struct FirstOrderLowPass *filter, const float tau, const float sample_time) |
| Update time constant (tau parameter) for first order low pass filter. | |
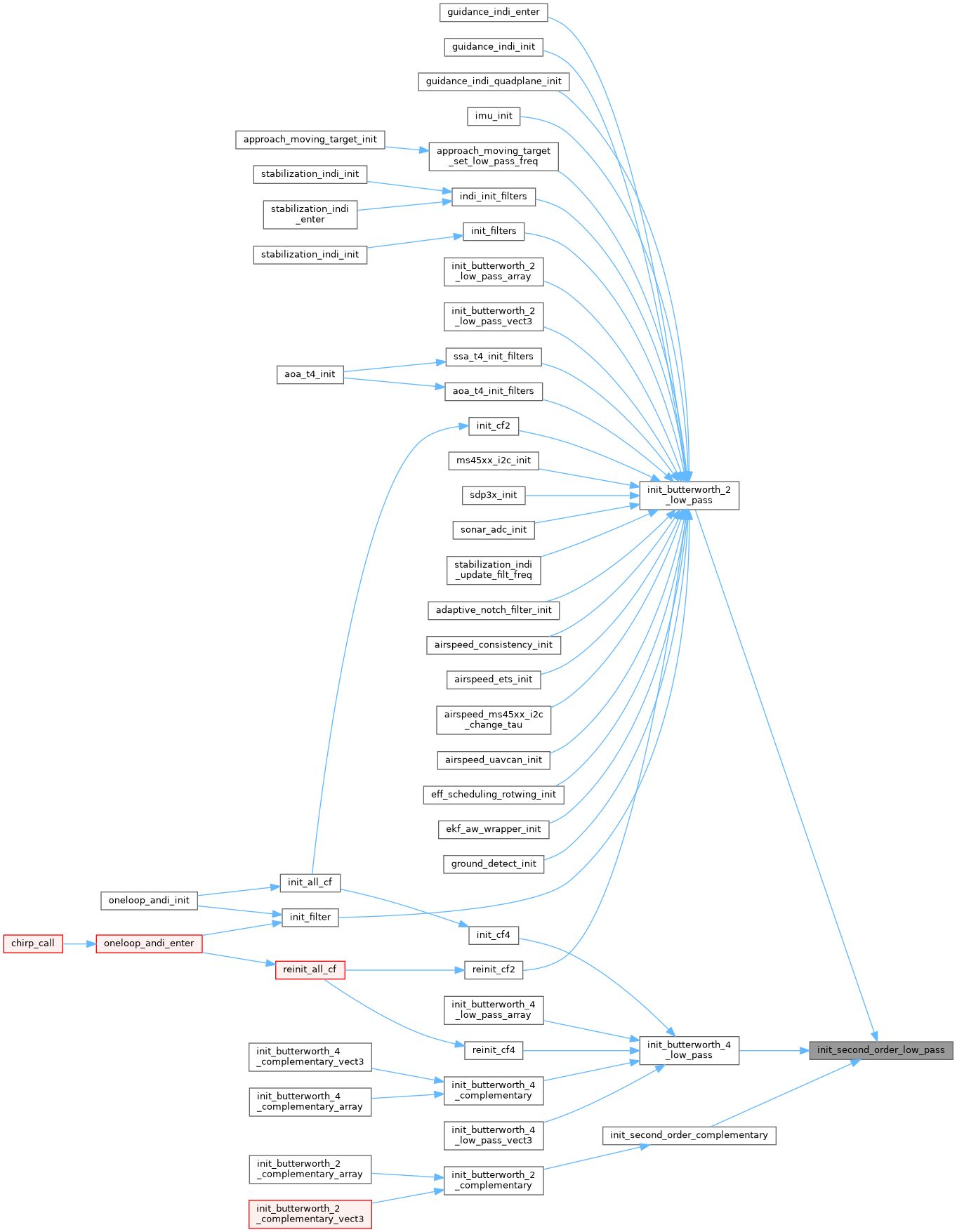
| static void | init_second_order_low_pass (struct SecondOrderLowPass *filter, const float tau, const float Q, const float sample_time, float value) |
| Init second order low pass filter. | |
| static float | reset_second_order_low_pass (struct SecondOrderLowPass *filter, const float value) |
| Reset the second order low-pass filter to a specific value. | |
| static float | update_second_order_low_pass (struct SecondOrderLowPass *filter, const float value) |
| Update second order low pass filter state with a new value. | |
| static float | get_second_order_low_pass (const struct SecondOrderLowPass *filter) |
| Get current value of the second order low pass filter. | |
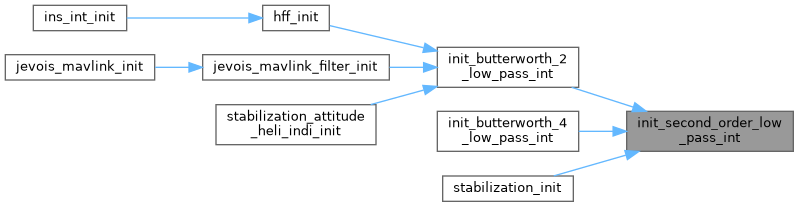
| static void | init_second_order_low_pass_int (struct SecondOrderLowPass_int *filter, const float cut_off, const float Q, float sample_time, int32_t value) |
| Init second order low pass filter(fixed point version). | |
| static int32_t | update_second_order_low_pass_int (struct SecondOrderLowPass_int *filter, const int32_t value) |
| Update second order low pass filter state with a new value(fixed point version). | |
| static int32_t | get_second_order_low_pass_int (const struct SecondOrderLowPass_int *filter) |
| Get current value of the second order low pass filter(fixed point version). | |
| static void | init_butterworth_2_low_pass (Butterworth2LowPass *filter, const float tau, const float sample_time, const float value) |
| Init a second order Butterworth filter. | |
| static float | update_butterworth_2_low_pass (Butterworth2LowPass *filter, const float value) |
| Update second order Butterworth low pass filter state with a new value. | |
| static float | reset_butterworth_2_low_pass (Butterworth2LowPass *filter, const float value) |
| Reset a Butterworth low-pass filter to a specific value. | |
| static float | get_butterworth_2_low_pass (const Butterworth2LowPass *filter) |
| Get current value of the second order Butterworth low pass filter. | |
| static void | init_butterworth_2_low_pass_int (Butterworth2LowPass_int *filter, const float cut_off, const float sample_time, int32_t value) |
| Init a second order Butterworth filter. | |
| static int32_t | update_butterworth_2_low_pass_int (Butterworth2LowPass_int *filter, const int32_t value) |
| Update second order Butterworth low pass filter state with a new value(fixed point version). | |
| static int32_t | get_butterworth_2_low_pass_int (const Butterworth2LowPass_int *filter) |
| Get current value of the second order Butterworth low pass filter(fixed point version). | |
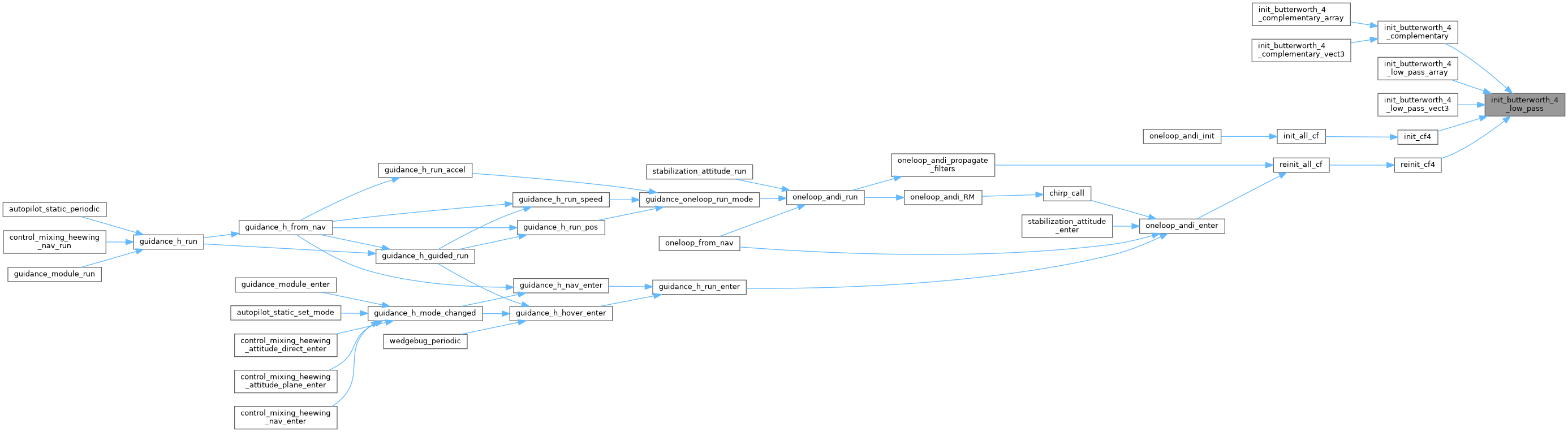
| static void | init_butterworth_4_low_pass (Butterworth4LowPass *filter, const float tau, const float sample_time, const float value) |
| Init a fourth order Butterworth filter. | |
| static float | update_butterworth_4_low_pass (Butterworth4LowPass *filter, const float value) |
| Update fourth order Butterworth low pass filter state with a new value. | |
| static float | get_butterworth_4_low_pass (const Butterworth4LowPass *filter) |
| Get current value of the fourth order Butterworth low pass filter. | |
| static void | reset_butterworth_4_low_pass (Butterworth4LowPass *filter, const float value) |
| Reset a Butterworth low-pass filter to a specific value. | |
| static void | init_butterworth_4_low_pass_int (Butterworth4LowPass_int *filter, const float cut_off, const float sample_time, int32_t value) |
| Init a fourth order Butterworth filter(fixed point version). | |
| static int32_t | update_butterworth_4_low_pass_int (Butterworth4LowPass_int *filter, const int32_t value) |
| Update fourth order Butterworth low pass filter state with a new value(fixed point version). | |
| static int32_t | get_butterworth_4_low_pass_int (const Butterworth4LowPass_int *filter) |
| Get current value of the fourth order Butterworth low pass filter(fixed point version). | |
Simple first order low pass filter with bilinear transform.
@FIXME: INT and FLOAT implementations are inconsistent, tau and cut_off freq are mixed. Suggestion: Change everything to freq.
Definition in file low_pass_filter.h.
| struct FirstOrderLowPass |
First order low pass filter structure.
using bilinear z transform
Definition at line 42 of file low_pass_filter.h.
| Data Fields | ||
|---|---|---|
| float | last_in | |
| float | last_out | |
| float | time_const | |
| struct SecondOrderLowPass |
Second order low pass filter structure.
using biquad filter with bilinear z transform
http://en.wikipedia.org/wiki/Digital_biquad_filter http://www.earlevel.com/main/2003/03/02/the-bilinear-z-transform
Laplace continious form:
1
H(s) = ----------------— s^2/w^2 + s/w*Q + 1
Polynomial discrete form:
b0 + b1 z^-1 + b2 z^-2
H(z) = -------------------— a0 + a1 z^-1 + a2 z^-2
with: a0 = 1 a1 = 2*(K^2 - 1) / (K^2 + K/Q + 1) a2 = (K^2 - K/Q + 1) / (K^2 + K/Q + 1) b0 = K^2 / (K^2 + K/Q + 1) b1 = 2*b0 b2 = b0 K = tan(pi*Fc/Fs) ~ pi*Fc/Fs = Ts/(2*tau) Fc: cutting frequency Fs: sampling frequency Ts: sampling period tau: time constant (tau = 1/(2*pi*Fc)) Q: gain at cutoff frequency
Note that b[0]=b[2], so we don't need to save b[2]
Definition at line 154 of file low_pass_filter.h.
| Data Fields | ||
|---|---|---|
| float | a[2] | denominator gains |
| float | b[2] | numerator gains |
| float | i[2] | input history |
| float | o[2] | output history |
| struct SecondOrderLowPass_int |
| struct Butterworth4LowPass |
Fourth order Butterworth low pass filter.
using two cascaded second order filters
Definition at line 400 of file low_pass_filter.h.
Collaboration diagram for Butterworth4LowPass:| Data Fields | ||
|---|---|---|
| struct SecondOrderLowPass | lp1 | |
| struct SecondOrderLowPass | lp2 | |
| struct Butterworth4LowPass_int |
Fourth order Butterworth low pass filter(fixed point version).
using two cascaded second order filters
Definition at line 465 of file low_pass_filter.h.
Collaboration diagram for Butterworth4LowPass_int:| Data Fields | ||
|---|---|---|
| struct SecondOrderLowPass_int | lp1 | |
| struct SecondOrderLowPass_int | lp2 | |
| #define INT32_FILT_FRAC 8 |
Definition at line 36 of file low_pass_filter.h.
Second order Butterworth low pass filter.
Definition at line 299 of file low_pass_filter.h.
Second order Butterworth low pass filter(fixed point version).
Definition at line 354 of file low_pass_filter.h.
|
inlinestatic |
Get current value of the second order Butterworth low pass filter.
| filter | second order Butterworth low pass filter structure |
Definition at line 347 of file low_pass_filter.h.
References get_second_order_low_pass().
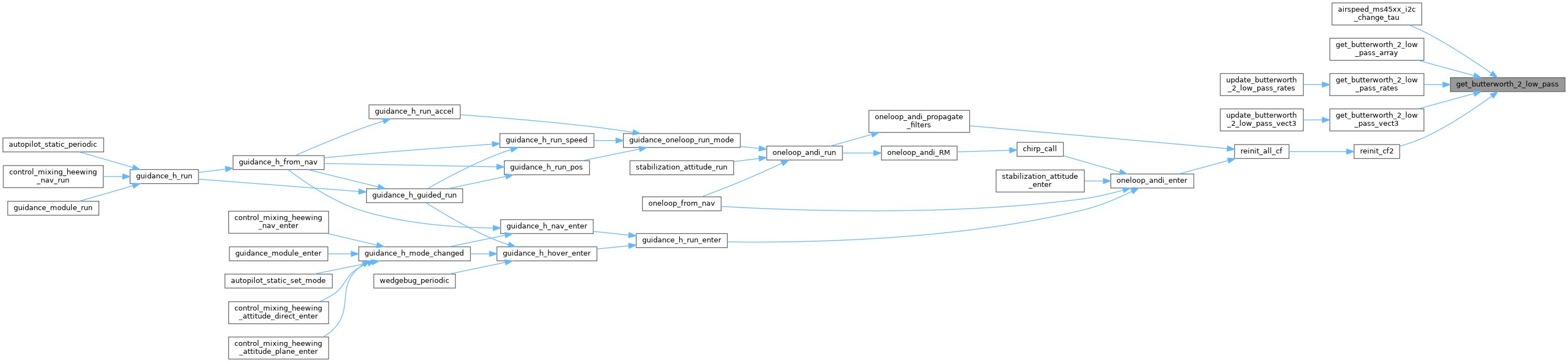
Referenced by airspeed_ms45xx_i2c_change_tau(), get_butterworth_2_low_pass_array(), get_butterworth_2_low_pass_rates(), get_butterworth_2_low_pass_vect3(), and reinit_cf2().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Get current value of the second order Butterworth low pass filter(fixed point version).
| filter | second order Butterworth low pass filter structure |
Definition at line 391 of file low_pass_filter.h.
References SecondOrderLowPass_int::o.
Referenced by mavlink_send_highres_imu().
Here is the caller graph for this function:
|
inlinestatic |
Get current value of the fourth order Butterworth low pass filter.
| filter | fourth order Butterworth low pass filter structure |
Definition at line 444 of file low_pass_filter.h.
References Butterworth4LowPass::lp2, and SecondOrderLowPass::o.
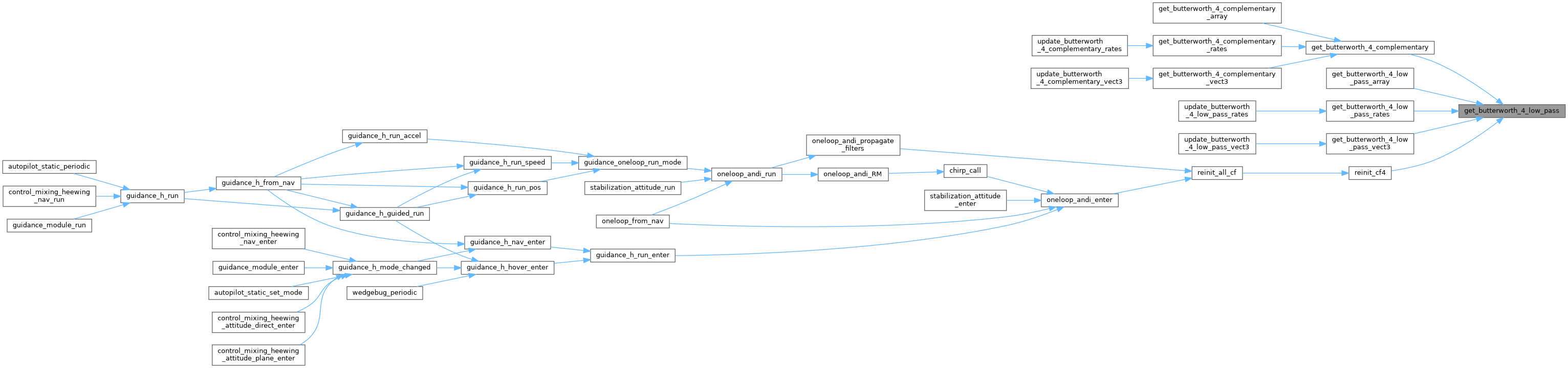
Referenced by get_butterworth_4_complementary(), get_butterworth_4_low_pass_array(), get_butterworth_4_low_pass_rates(), get_butterworth_4_low_pass_vect3(), and reinit_cf4().
Here is the caller graph for this function:
|
inlinestatic |
Get current value of the fourth order Butterworth low pass filter(fixed point version).
| filter | fourth order Butterworth low pass filter structure |
Definition at line 510 of file low_pass_filter.h.
References Butterworth4LowPass_int::lp2, and SecondOrderLowPass_int::o.
|
inlinestatic |
Get current value of the first order low pass filter.
| filter | first order low pass filter structure |
Definition at line 101 of file low_pass_filter.h.
References FirstOrderLowPass::last_out.
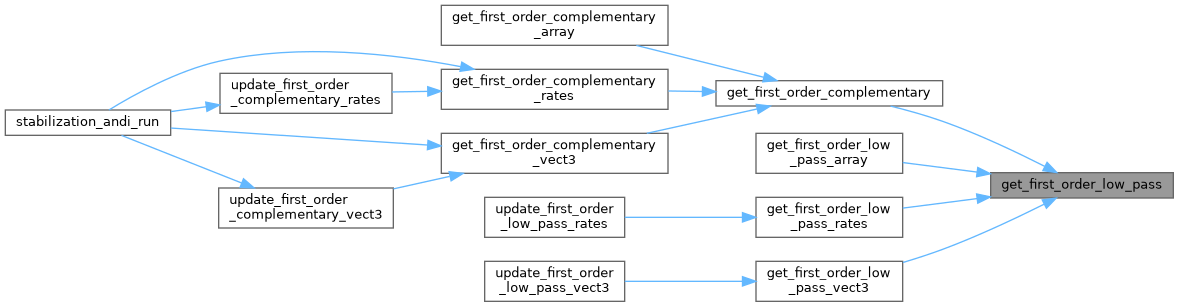
Referenced by get_first_order_complementary(), get_first_order_low_pass_array(), get_first_order_low_pass_rates(), and get_first_order_low_pass_vect3().
Here is the caller graph for this function:
|
inlinestatic |
Get current value of the second order low pass filter.
| filter | second order low pass filter structure |
Definition at line 221 of file low_pass_filter.h.
References SecondOrderLowPass::o.
Referenced by get_butterworth_2_low_pass(), and get_second_order_complementary().
Here is the caller graph for this function:
|
inlinestatic |
Get current value of the second order low pass filter(fixed point version).
| filter | second order low pass filter structure |
Definition at line 292 of file low_pass_filter.h.
References SecondOrderLowPass_int::o.
|
inlinestatic |
Init a second order Butterworth filter.
based on the generic second order filter with Q = 0.7071 = 1/sqrt(2)
http://en.wikipedia.org/wiki/Butterworth_filter
| filter | second order Butterworth low pass filter structure |
| tau | time constant of the second order low pass filter |
| sample_time | sampling period of the signal |
| value | initial value of the filter |
Definition at line 313 of file low_pass_filter.h.
References foo, and init_second_order_low_pass().
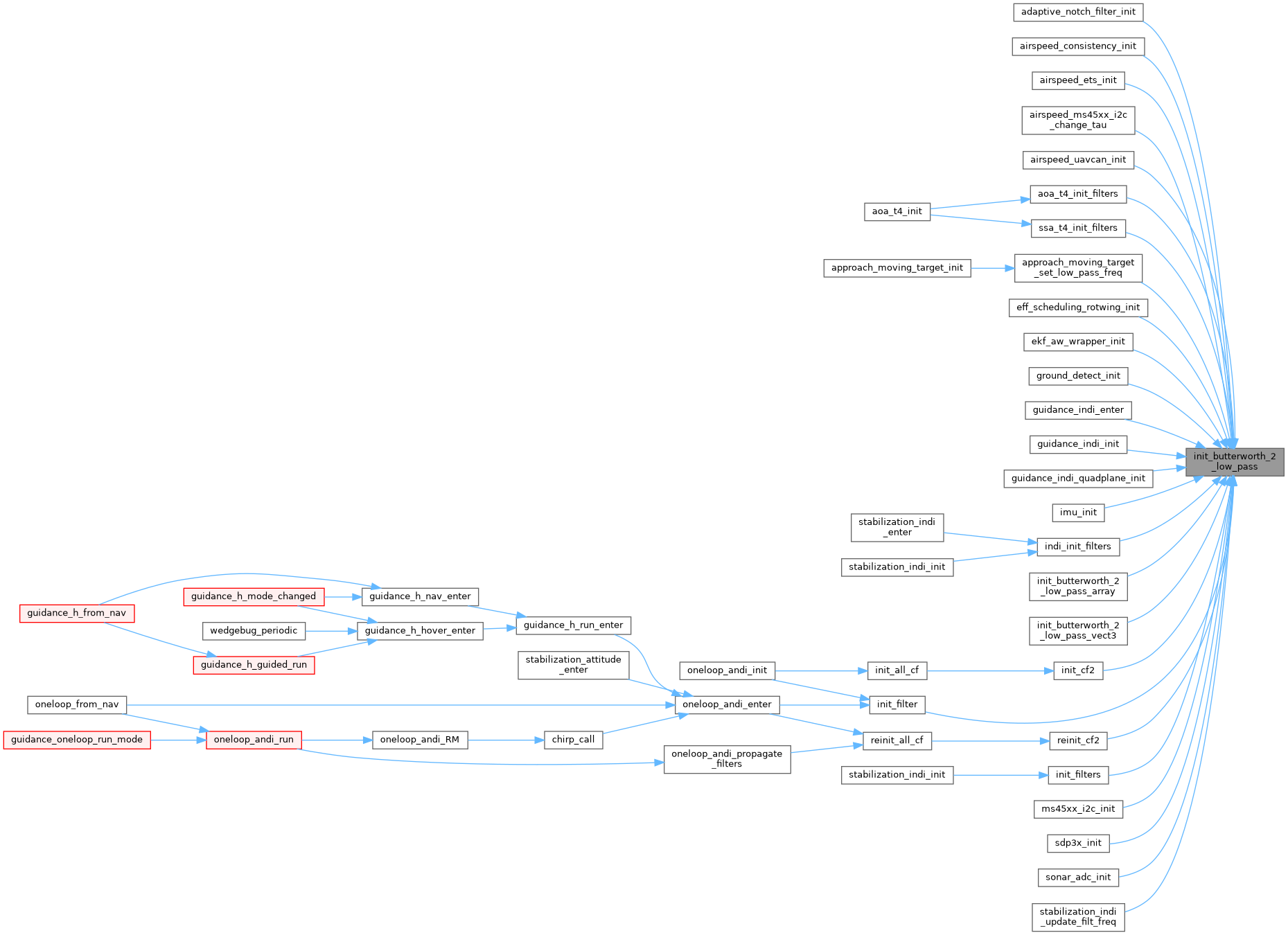
Referenced by adaptive_notch_filter_init(), airspeed_consistency_init(), airspeed_ets_init(), airspeed_ms45xx_i2c_change_tau(), airspeed_uavcan_init(), aoa_t4_init_filters(), approach_moving_target_set_low_pass_freq(), eff_scheduling_rotwing_init(), ekf_aw_wrapper_init(), ground_detect_init(), guidance_indi_enter(), guidance_indi_init(), guidance_indi_quadplane_init(), imu_init(), indi_init_filters(), init_butterworth_2_low_pass_array(), init_butterworth_2_low_pass_vect3(), init_cf2(), init_filter(), init_filters(), ms45xx_i2c_init(), reinit_cf2(), sdp3x_init(), sonar_adc_init(), ssa_t4_init_filters(), and stabilization_indi_update_filt_freq().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Init a second order Butterworth filter.
based on the generic second order filter with Q = 0.7071 = 1/sqrt(2)
http://en.wikipedia.org/wiki/Butterworth_filter
| filter | second order Butterworth low pass filter structure |
| cut_off | Cutoff frequency of the filter with -3dB |
| sample_time | sampling period of the signal |
| value | initial value of the filter |
Definition at line 368 of file low_pass_filter.h.
References foo, and init_second_order_low_pass_int().
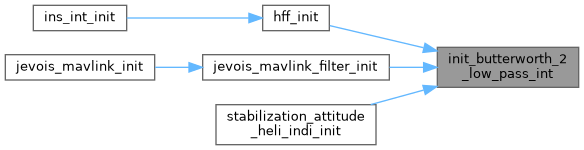
Referenced by hff_init(), jevois_mavlink_filter_init(), and stabilization_attitude_heli_indi_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Init a fourth order Butterworth filter.
based on two generic second order filters with Q1 = 1.30651 and Q2 = 0.541184
http://en.wikipedia.org/wiki/Butterworth_filter
| filter | fourth order Butterworth low pass filter structure |
| tau | time constant of the fourth order low pass filter |
| sample_time | sampling period of the signal |
| value | initial value of the filter |
Definition at line 418 of file low_pass_filter.h.
References foo, init_second_order_low_pass(), Butterworth4LowPass::lp1, and Butterworth4LowPass::lp2.
Referenced by init_butterworth_4_complementary(), init_butterworth_4_low_pass_array(), init_butterworth_4_low_pass_vect3(), init_cf4(), and reinit_cf4().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Init a fourth order Butterworth filter(fixed point version).
based on two generic second order filters with Q1 = 1.30651 and Q2 = 0.541184
http://en.wikipedia.org/wiki/Butterworth_filter
| filter | fourth order Butterworth low pass filter structure |
| cut_off | Cutoff frequency of the filter with -3dB |
| sample_time | sampling period of the signal |
| value | initial value of the filter |
Definition at line 483 of file low_pass_filter.h.
References foo, init_second_order_low_pass_int(), Butterworth4LowPass_int::lp1, and Butterworth4LowPass_int::lp2.
Here is the call graph for this function:
|
inlinestatic |
Init first order low pass filter.
Laplace transform in continious time: 1 H(s) = ------— 1 + tau*s
| filter | first order low pass filter structure |
| tau | time constant of the first order low pass filter |
| sample_time | sampling period of the signal |
| value | initial value of the filter |
Definition at line 60 of file low_pass_filter.h.
References foo, FirstOrderLowPass::last_in, FirstOrderLowPass::last_out, and FirstOrderLowPass::time_const.
Referenced by cloud_sensor_init(), indi_init_filters(), init_filters(), init_first_order_complementary(), init_first_order_low_pass_array(), init_first_order_low_pass_vect3(), nps_fdm_init(), rpm_sensor_init(), stabilization_indi_simple_reset_r_filter_cutoff(), stabilization_indi_update_filt_freq(), and sys_id_chirp_init().
Here is the caller graph for this function:
|
inlinestatic |
Init second order low pass filter.
| filter | second order low pass filter structure |
| tau | time constant of the second order low pass filter |
| Q | Q value of the second order low pass filter |
| sample_time | sampling period of the signal |
| value | initial value of the filter |
Definition at line 170 of file low_pass_filter.h.
References SecondOrderLowPass::a, SecondOrderLowPass::b, foo, SecondOrderLowPass::i, K, and SecondOrderLowPass::o.
Referenced by init_butterworth_2_low_pass(), init_butterworth_4_low_pass(), and init_second_order_complementary().
Here is the caller graph for this function:
|
inlinestatic |
Init second order low pass filter(fixed point version).
| filter | second order low pass filter structure |
| cut_off | Cutoff frequency of the filter with -3dB |
| Q | Q value of the second order low pass filter |
| sample_time | sampling period of the signal |
| value | initial value of the filter |
Definition at line 242 of file low_pass_filter.h.
References SecondOrderLowPass::a, SecondOrderLowPass_int::a, SecondOrderLowPass_int::b, BFP_OF_REAL, foo, SecondOrderLowPass_int::i, INT32_FILT_FRAC, K, SecondOrderLowPass_int::loop_gain, and SecondOrderLowPass_int::o.
Referenced by init_butterworth_2_low_pass_int(), init_butterworth_4_low_pass_int(), and stabilization_init().
Here is the caller graph for this function:
|
inlinestatic |
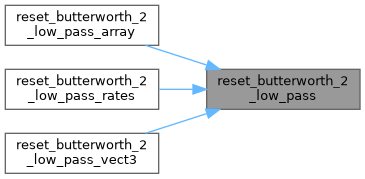
Reset a Butterworth low-pass filter to a specific value.
| [out] | filter | Butterworth2LowPass filter instance to reset. |
| [in] | value | Value to reset the filter to. |
Definition at line 337 of file low_pass_filter.h.
References reset_second_order_low_pass().
Referenced by reset_butterworth_2_low_pass_array(), reset_butterworth_2_low_pass_rates(), and reset_butterworth_2_low_pass_vect3().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
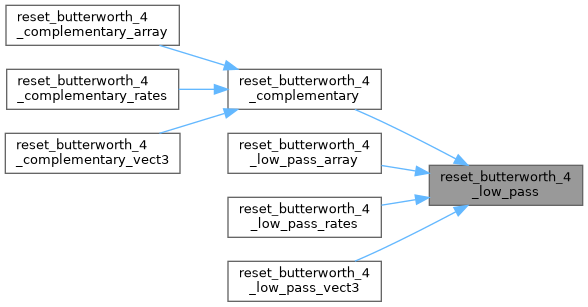
Reset a Butterworth low-pass filter to a specific value.
| [out] | filter | Butterworth4LowPass filter instance to reset. |
| [in] | value | Value to reset the filter to. |
Definition at line 455 of file low_pass_filter.h.
References SecondOrderLowPass::i, Butterworth4LowPass::lp1, Butterworth4LowPass::lp2, and SecondOrderLowPass::o.
Referenced by reset_butterworth_4_complementary(), reset_butterworth_4_low_pass_array(), reset_butterworth_4_low_pass_rates(), and reset_butterworth_4_low_pass_vect3().
Here is the caller graph for this function:
|
inlinestatic |
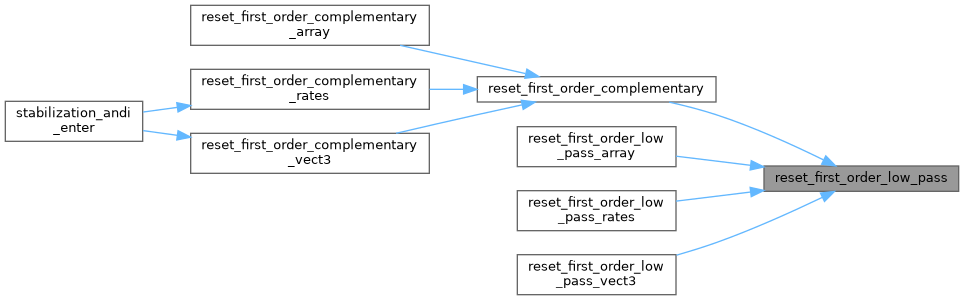
Reset the first order low-pass filter to a specific value.
| filter | first order low pass filter structure |
| value | Value to reset the filter to |
Definition at line 89 of file low_pass_filter.h.
References FirstOrderLowPass::last_in, and FirstOrderLowPass::last_out.
Referenced by reset_first_order_complementary(), reset_first_order_low_pass_array(), reset_first_order_low_pass_rates(), and reset_first_order_low_pass_vect3().
Here is the caller graph for this function:
|
inlinestatic |
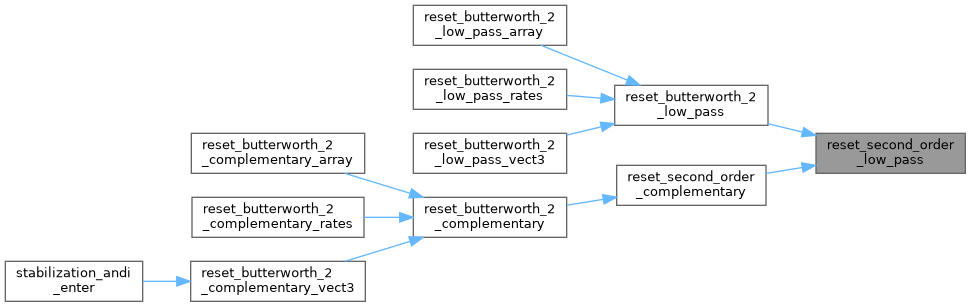
Reset the second order low-pass filter to a specific value.
| filter | second order low pass filter structure |
| value | Value to reset the filter to |
Definition at line 190 of file low_pass_filter.h.
References SecondOrderLowPass::i, and SecondOrderLowPass::o.
Referenced by reset_butterworth_2_low_pass(), and reset_second_order_complementary().
Here is the caller graph for this function:
|
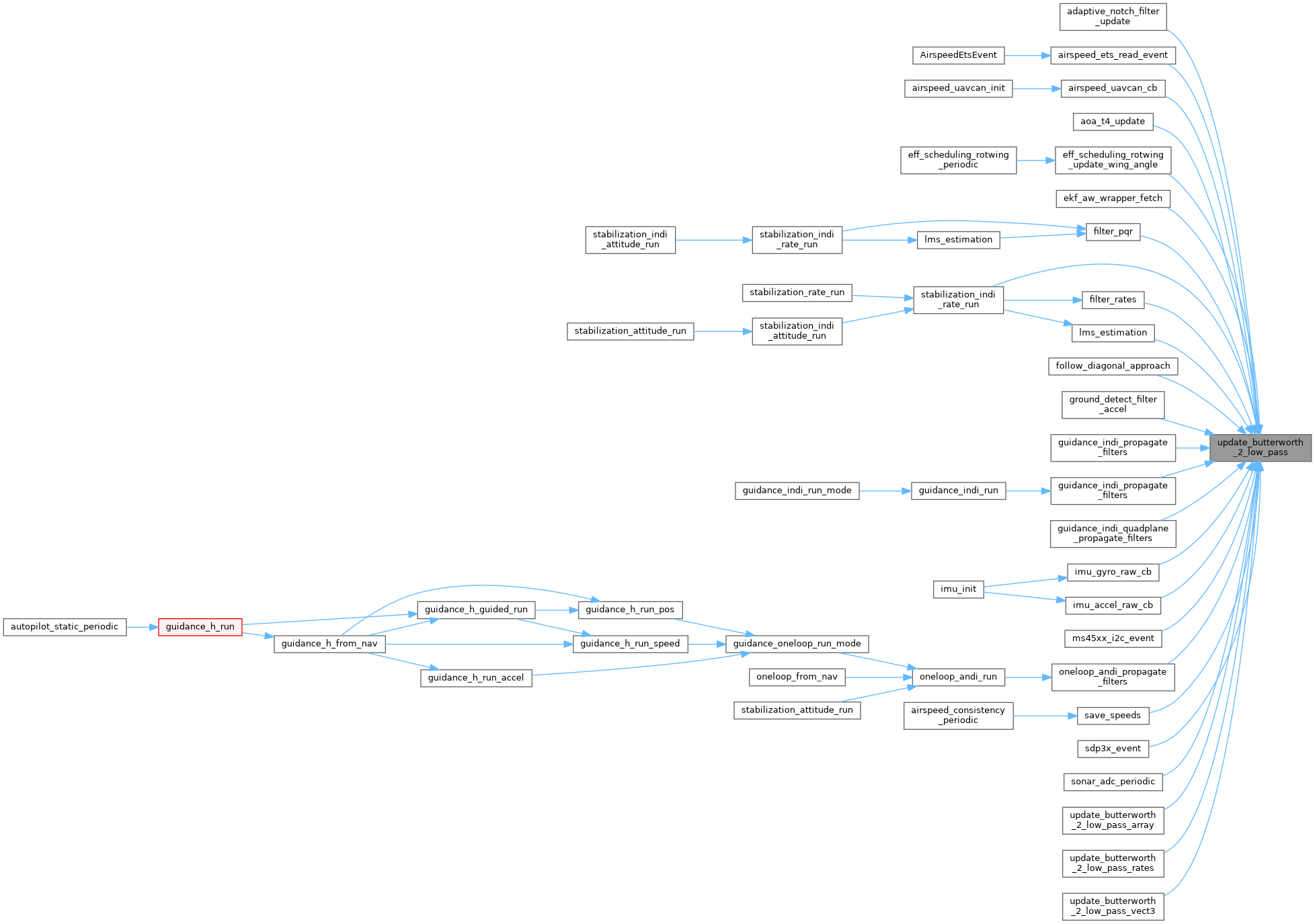
inlinestatic |
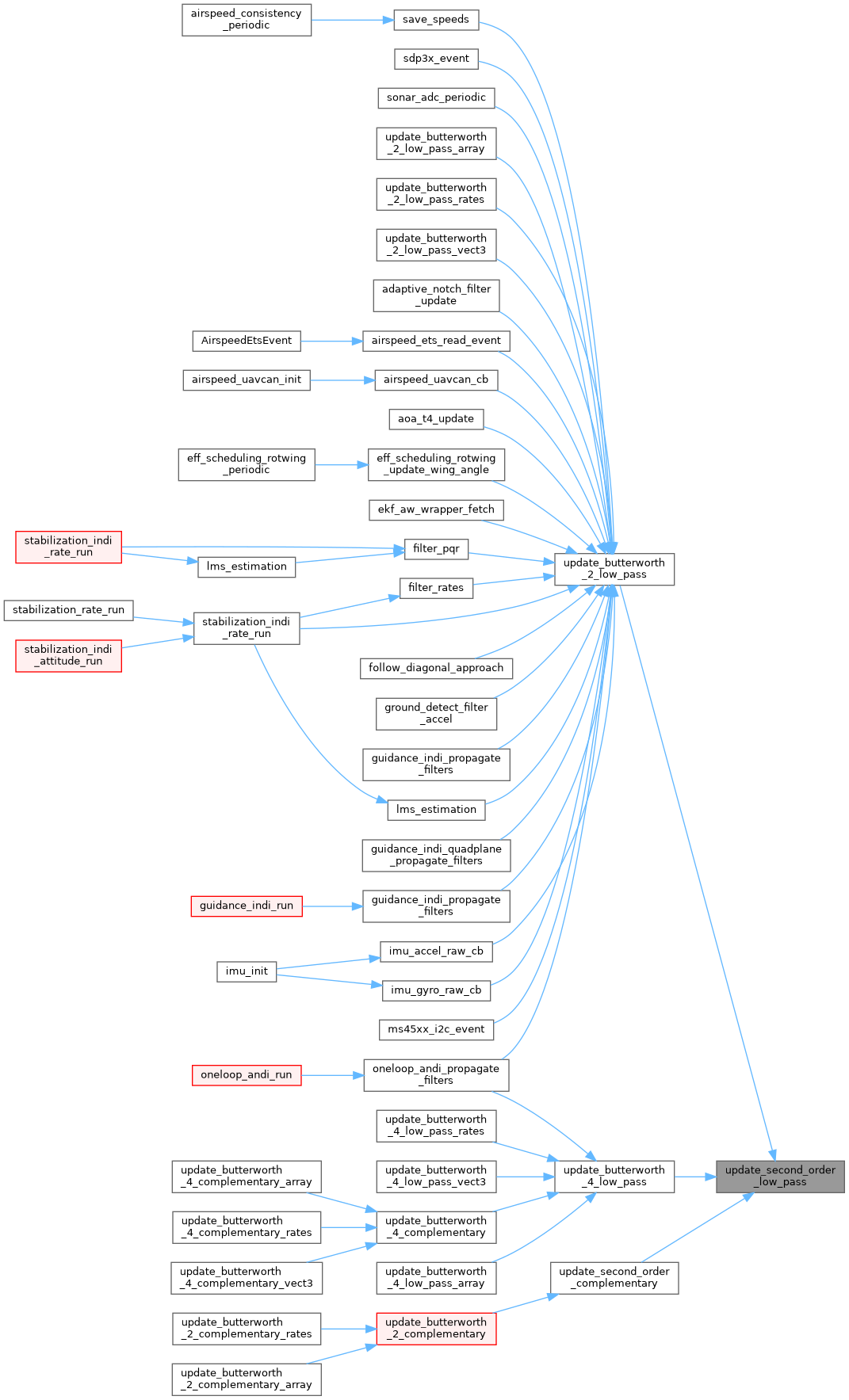
Update second order Butterworth low pass filter state with a new value.
| filter | second order Butterworth low pass filter structure |
| value | new input value of the filter |
Definition at line 325 of file low_pass_filter.h.
References update_second_order_low_pass().
Referenced by adaptive_notch_filter_update(), airspeed_ets_read_event(), airspeed_uavcan_cb(), aoa_t4_update(), eff_scheduling_rotwing_update_wing_angle(), ekf_aw_wrapper_fetch(), filter_pqr(), filter_rates(), follow_diagonal_approach(), ground_detect_filter_accel(), guidance_indi_propagate_filters(), guidance_indi_propagate_filters(), guidance_indi_quadplane_propagate_filters(), imu_accel_raw_cb(), imu_gyro_raw_cb(), lms_estimation(), ms45xx_i2c_event(), oneloop_andi_propagate_filters(), save_speeds(), sdp3x_event(), sonar_adc_periodic(), stabilization_indi_rate_run(), update_butterworth_2_low_pass_array(), update_butterworth_2_low_pass_rates(), and update_butterworth_2_low_pass_vect3().
Here is the call graph for this function: Here is the caller graph for this function:
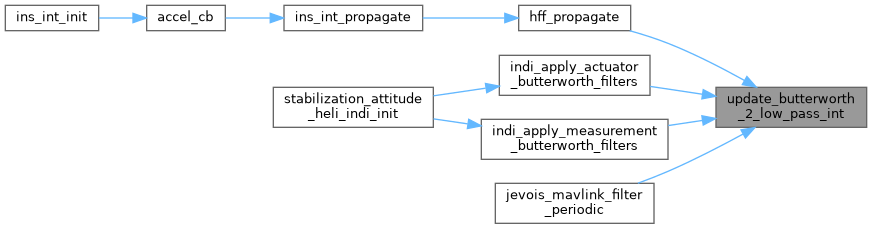
|
inlinestatic |
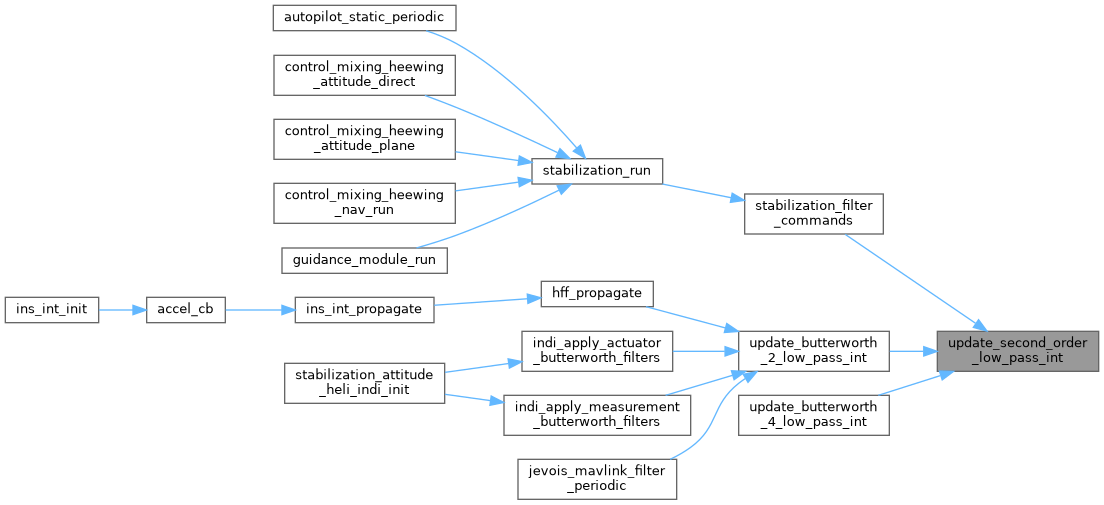
Update second order Butterworth low pass filter state with a new value(fixed point version).
| filter | second order Butterworth low pass filter structure |
| value | new input value of the filter |
Definition at line 381 of file low_pass_filter.h.
References update_second_order_low_pass_int().
Referenced by hff_propagate(), indi_apply_actuator_butterworth_filters(), indi_apply_measurement_butterworth_filters(), and jevois_mavlink_filter_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
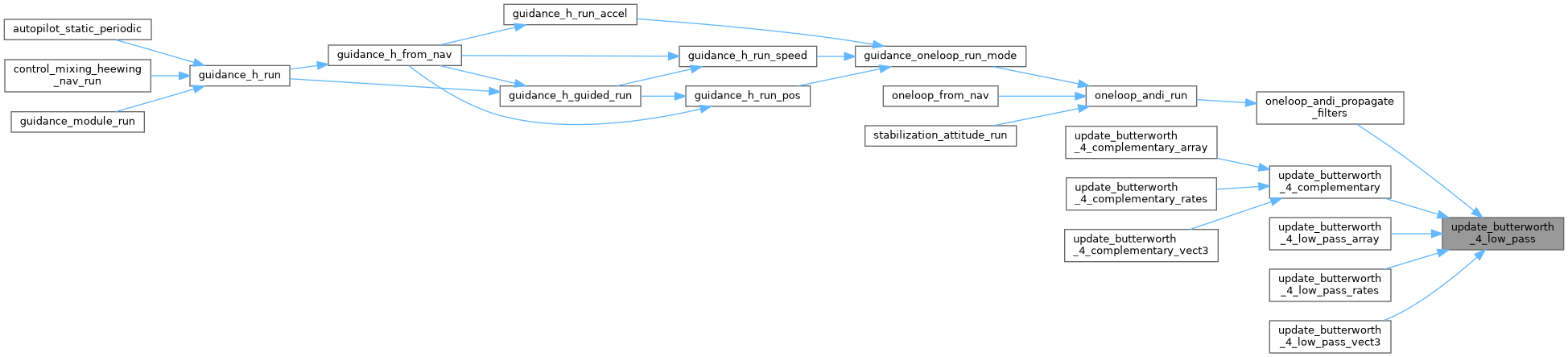
inlinestatic |
Update fourth order Butterworth low pass filter state with a new value.
using two cascaded second order filters
| filter | fourth order Butterworth low pass filter structure |
| value | new input value of the filter |
Definition at line 433 of file low_pass_filter.h.
References foo, Butterworth4LowPass::lp1, Butterworth4LowPass::lp2, and update_second_order_low_pass().
Referenced by oneloop_andi_propagate_filters(), update_butterworth_4_complementary(), update_butterworth_4_low_pass_array(), update_butterworth_4_low_pass_rates(), and update_butterworth_4_low_pass_vect3().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Update fourth order Butterworth low pass filter state with a new value(fixed point version).
using two cascaded second order filters
| filter | fourth order Butterworth low pass filter structure |
| value | new input value of the filter |
Definition at line 499 of file low_pass_filter.h.
References foo, Butterworth4LowPass_int::lp1, Butterworth4LowPass_int::lp2, and update_second_order_low_pass_int().
Here is the call graph for this function:
|
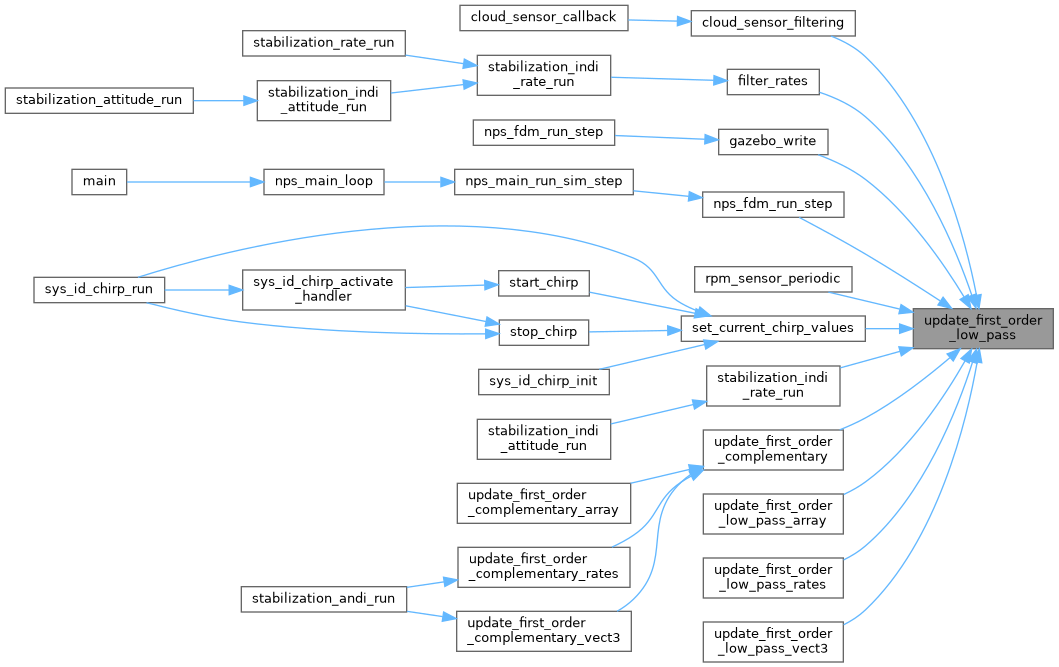
inlinestatic |
Update first order low pass filter state with a new value.
| filter | first order low pass filter structure |
| value | new input value of the filter |
Definition at line 74 of file low_pass_filter.h.
References FirstOrderLowPass::last_in, FirstOrderLowPass::last_out, and FirstOrderLowPass::time_const.
Referenced by cloud_sensor_filtering(), filter_rates(), gazebo_write(), nps_fdm_run_step(), rpm_sensor_periodic(), set_current_chirp_values(), stabilization_indi_rate_run(), update_first_order_complementary(), update_first_order_low_pass_array(), update_first_order_low_pass_rates(), and update_first_order_low_pass_vect3().
Here is the caller graph for this function:
|
inlinestatic |
Update time constant (tau parameter) for first order low pass filter.
| filter | first order low pass filter structure |
| tau | time constant of the first order low pass filter |
| sample_time | sampling period of the signal |
Definition at line 112 of file low_pass_filter.h.
References foo, and FirstOrderLowPass::time_const.
Referenced by cloud_sensor_update_tau().
Here is the caller graph for this function:
|
inlinestatic |
Update second order low pass filter state with a new value.
| filter | second order low pass filter structure |
| value | new input value of the filter |
Definition at line 202 of file low_pass_filter.h.
References SecondOrderLowPass::a, SecondOrderLowPass::b, SecondOrderLowPass::i, and SecondOrderLowPass::o.
Referenced by update_butterworth_2_low_pass(), update_butterworth_4_low_pass(), and update_second_order_complementary().
Here is the caller graph for this function:
|
inlinestatic |
Update second order low pass filter state with a new value(fixed point version).
| filter | second order low pass filter structure |
| value | new input value of the filter |
Definition at line 272 of file low_pass_filter.h.
References SecondOrderLowPass_int::a, SecondOrderLowPass_int::b, SecondOrderLowPass_int::i, SecondOrderLowPass_int::loop_gain, and SecondOrderLowPass_int::o.
Referenced by stabilization_filter_commands(), update_butterworth_2_low_pass_int(), and update_butterworth_4_low_pass_int().
Here is the caller graph for this function: