|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
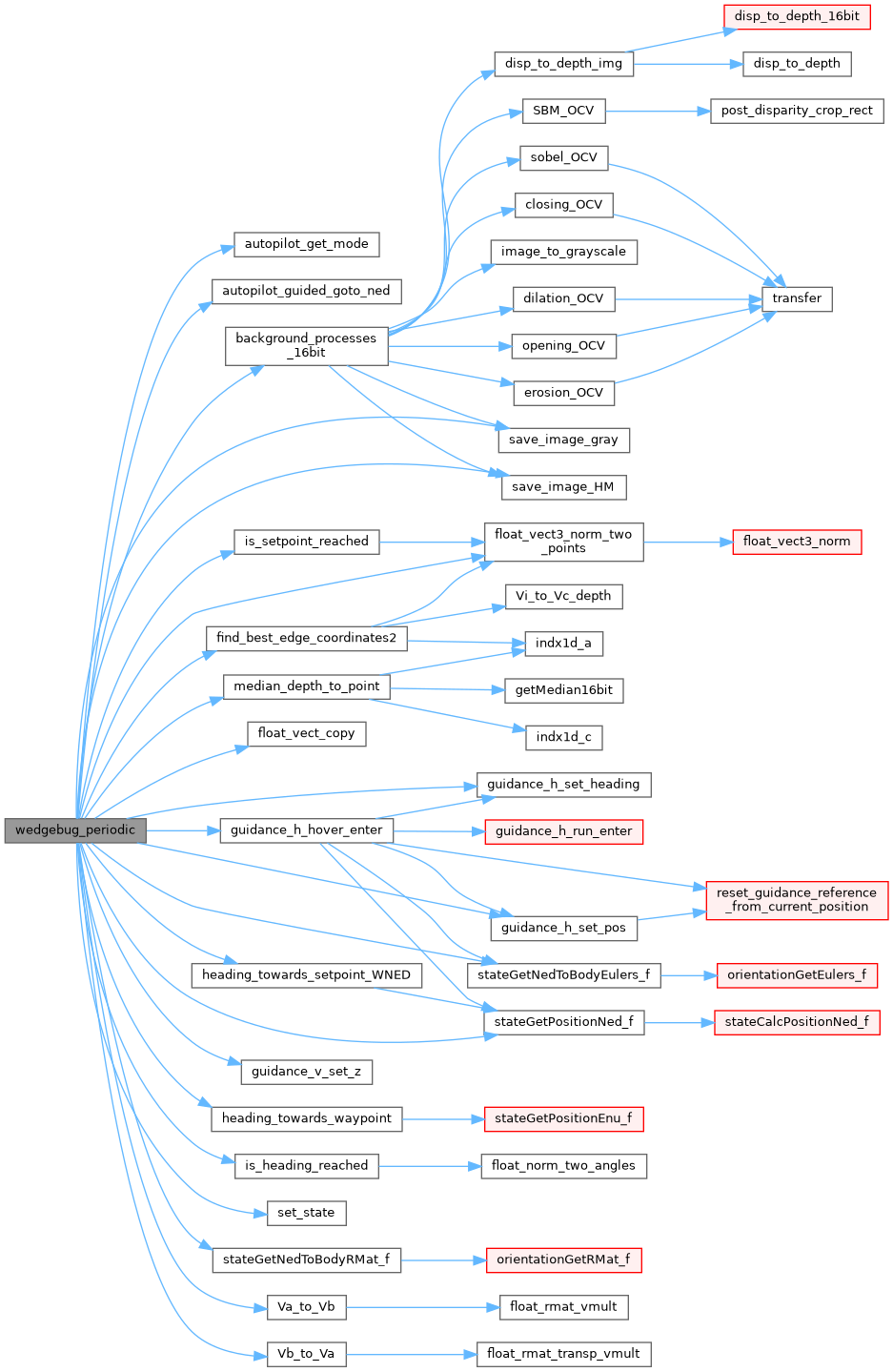
#include <stdio.h>#include "modules/wedgebug/wedgebug.h"#include "modules/wedgebug/wedgebug_opencv.h"#include "modules/computer_vision/cv.h"#include "modules/computer_vision/lib/vision/image.h"#include "pthread.h"#include <stdint.h>#include "state.h"#include "math/pprz_algebra_float.h"#include "math/pprz_algebra.h"#include "math/pprz_geodetic_float.h"#include "generated/flight_plan.h"#include "firmwares/rotorcraft/autopilot_guided.h"#include <math.h>#include "autopilot.h"#include <time.h> Include dependency graph for wedgebug.c:
Include dependency graph for wedgebug.c:Go to the source code of this file.
Data Structures | |
| struct | ES_angles |
Macros | |
| #define | WEDGEBUG_CAMERA_RIGHT_FPS 0 |
| #define | WEDGEBUG_CAMERA_LEFT_FPS 0 |
Enumerations | |
| enum | navigation_state { MOVE_TO_GOAL = 1 , POSITION_GOAL = 2 , WEDGEBUG_START = 3 , MOVE_TO_EDGE = 4 , POSITION_EDGE = 5 , EDGE_SCAN = 6 } |
| Camera focal length, in pixels (i.e. distance between camera. More... | |
| enum | control_mode_state { DIRECT_CONTROL = 1 , AUTONOMOUS_NAV = 2 , AUTONOMOUS_GUIDED = 3 } |
Variables | |
| struct image_t | img_left |
| struct image_t | img_right |
| Image obtained from left camera (UYVY format) | |
| struct image_t | img_left_int8 |
| Image obtained from right camera (UYVY format) | |
| struct image_t | img_left_int8_cropped |
| Image obtained from left camera, converted into 8bit gray image. | |
| struct image_t | img_right_int8 |
| struct image_t | img_disparity_int8_cropped |
| Image obtained from right camera, converted into 8bit gray image. | |
| struct image_t | img_depth_int16_cropped |
| Image obtained after simple block matching. | |
| struct image_t | img_middle_int8_cropped |
| Image holding depth values (cm) obtained from the disparity image. | |
| struct image_t | img_edges_int8_cropped |
| struct image_t | img_disparity_int16_cropped |
| Image obtained from the external sobel edge detection function = sobel_OCV. | |
| struct image_t | img_middle_int16_cropped |
| struct crop_t | img_cropped_info |
| struct img_size_t | img_dims |
| struct img_size_t | img_cropped_dims |
| Dimensions of images captured by the camera (left and right have same dimension) | |
| struct img_size_t | kernel_median_dims |
| Dimension of image after it has been cropped to remove pixel error due to block matching limitations. | |
| struct kernel_C1 | median_kernel |
| Dimensions of the kernel that detect median disparity in front of drone (for obstacle detection) | |
| struct kernel_C1 | median_kernel16bit |
| int | SE_opening_OCV |
| int | SE_closing_OCV |
| SE size for the opening operation. | |
| int | SE_dilation_OCV_1 |
| SE size for the closing operation. | |
| int | SE_dilation_OCV_2 |
| SE size for the first dilation operation. | |
| int | SE_erosion_OCV |
| SE size for the second dilation operation (see state 3 "WEDGEBUG_START" and state 6 "POSITION_EDGE" ) | |
| int | SE_sobel_OCV |
| SE size for the erosion operation (see state 3 "WEDGEBUG_START" and state 6 "POSITION_EDGE", its needed to "drag" the depth of the foreground objects over the edges detected) | |
| uint16_t | K_median_w |
| SE size for the Sobel operation, to detect edges. | |
| uint16_t | K_median_h |
| Width of kernel for the median kernel. | |
| struct FloatVect3 | VSTARTwenu |
| Height of kernel for the median kernel. | |
| struct FloatVect3 | VSTARTwned |
| Declared vector of coordinates of start position in ENU world coordinate system. | |
| struct FloatVect3 | VGOALwenu |
| Declared vector of coordinates of start position in NED world coordinate system. | |
| struct FloatVect3 | VGOALwned |
| Declared vector of coordinates of goal in ENU world coordinate system. | |
| struct FloatVect3 | VGOALr |
| Declared vector of coordinates of goal in NED world coordinate system. | |
| struct FloatVect3 | VGOALc |
| Declared vector of coordinates of goal in robot coordinate system. | |
| struct FloatVect3 | VEDGECOORDINATESc |
| Declared vector of coordinates of goal in camera coordinate system. | |
| struct FloatVect3 | VEDGECOORDINATESr |
| Declared vector of coordinates of "best" edge detected in camera coordinate system. | |
| struct FloatVect3 | VEDGECOORDINATESwned |
| Declared vector of coordinates of "best" edge detected in robot coordinate system. | |
| struct FloatVect3 | VEDGECOORDINATESwenu |
| Declared vector of coordinates of "best" edge detected in NED world coordinate system. | |
| struct FloatVect3 | VDISTANCEPOSITIONwned |
| Declared vector of coordinates of "best" edge detected in ENU world coordinate system. | |
| struct FloatVect3 | VHOLDINGPOINTwned |
| Declared a vector to hold the current position, which is needed for calculating the distance traveled. | |
| struct FloatVect3 | VPBESTEDGECOORDINATESwned |
| Declared a vector to hold the position of a holding point (offten used to make sure drone stays still before stuff happens) | |
| int | threshold_edge_magnitude |
| Declared vector of coordinates of previous "best" edge detected in NED world coordinate system. | |
| uint8_t | threshold_median_disparity |
| Edges with a magnitude above this value are detected. Above this value, edges are given the value 127, otherwise they are given the value zero. | |
| uint8_t | threshold_disparity_of_edges |
| Above this median disparity, an obstacle is considered to block the way (i.e. the blocking obstacle need to be close) | |
| float | threshold_distance_to_goal |
| Above this disparity edges are eligible for WedgeBug algorithm (i.e. edges cannot be very far away) | |
| float | threshold_distance_to_angle |
| Below this distance (in meters) it is considered that the robot has reached the goal. | |
| float | threshold_distance_to_goal_direct |
| Below this distance (in radians) it is considered that the robot has reached the target angle. | |
| uint16_t | threshold_median_depth |
| Below this distance (in meters) it is considered that the robot has reached the goal, in DIRECT_CONTROL mode. | |
| uint16_t | threshold_depth_of_edges |
| Below this median disparity, an obstacle is considered to block the way (i.e. the blocking obstacle need to be close) | |
| int16_t | obstacle_confidence |
| Below this depth (m) edges are eligible for the WedgeBug algorithm (i.e. edges cannot be very far away) | |
| int16_t | free_path_confidence |
| This is the confidence that an obstacle was spotted. | |
| int16_t | position_confidence |
| This is the confidence that no obstacle was spotted. | |
| int16_t | heading_confidence |
| This is the confidence that the desired position was reached. | |
| int16_t | edge_found_macro_confidence |
| This is the confidence that the desired heading is reached. | |
| int16_t | no_edge_found_confidence |
| This is the confidence that an edge was found - outside of the find_best_edge_coordinates function. | |
| int16_t | max_obstacle_confidence |
| This is the confidence that no edge was found. | |
| int16_t | max_free_path_confidence |
| This is the max confidence that an obstacle was spotted. | |
| int16_t | max_position_confidence |
| This is the max confidence that an obstacle was not spotted. | |
| int16_t | max_heading_confidence |
| This is the max confidence that a specific position was reached. | |
| int16_t | max_edge_found_micro_confidence |
| This is the max confidence that a specific heading was reached. | |
| int16_t | max_edge_found_macro_confidence |
| This is the max confidence that edges (micro-see above) were found. | |
| int16_t | max_no_edge_found_confidence |
| This is the max confidence that edges (macro-see above were found. | |
| uint8_t | is_start_reached_flag |
| This is the max confidence that no edges were found. | |
| uint8_t | is_setpoint_reached_flag |
| uint8_t | is_obstacle_detected_flag |
| Set to 1 if setpoint is reached, 0 otherwise. | |
| uint8_t | is_path_free_flag |
| Set to 1 if obstacle is detected, 0 otherwise. | |
| uint8_t | is_heading_reached_flag |
| Set to 1 if no obstacle is detected, 0 otherwise. | |
| uint8_t | is_edge_found_macro_flag |
| Set to 1 if heading is reached, 0 otherwise. | |
| uint8_t | is_edge_found_micro_flag |
| Set to 1 if best edge (according to macro confidence) was found, 0 otherwise. | |
| uint8_t | is_no_edge_found_flag |
| Set to 1 if best edge (according to micro confidence) was found, 0 otherwise. | |
| uint8_t | is_state_changed_flag |
| Set to 1 if no edge was identified, 0 otherwise. | |
| uint8_t | is_mode_changed_flag |
| Set to 1 if state was changed, 0 otherwise. | |
| uint8_t | save_images_flag |
| Set to 1 if control mode of drone is changed, 0 otherwise. | |
| struct point_t | c_img |
| struct point_t | c_img_cropped |
| Principal point of normal camera images. | |
| struct crop_t | edge_search_area |
| Principal point of cropped camera images. | |
| struct FloatRMat | Rwnedwenu |
| This structure holds information about the window in which edges are searched in. | |
| struct FloatVect3 | VNEDwenu |
| struct FloatRMat | Rrwned |
| struct FloatVect3 | VRwned |
| struct FloatRMat | Rcr |
| struct FloatVect3 | VCr |
| float | b |
| uint16_t | f = WEDGEBUG_CAMERA_FOCAL_LENGTH |
| Camera baseline, in meters (i.e. horizontal distance between the two cameras of the stereo setup) | |
| enum navigation_state | current_state |
| enum control_mode_state | current_mode |
| struct ES_angles | initial_heading |
| double | time_state [NUMBER_OF_STATES] |
| double | counter_state [NUMBER_OF_STATES] |
| double | counter_cycles |
| clock_t | clock_total_time |
| clock_t | clock_total_time_current |
| clock_t | clock_total_time_previous |
| clock_t | clock_background_processes |
| clock_t | clock_FSM |
| uint8_t | previous_state |
| uint8_t | previous_mode |
| Variable that saves previous state the state machine was in, for some memory. | |
| int | N_disparities = 64 |
| Variable that saves previous mode to control the drone, for some memory. | |
| int | block_size_disparities = 25 |
| Number of disparity levels (0-this number) | |
| int | min_disparity = 0 |
| Block size used for the block matching (SBM) function. | |
| float | heading |
| float | max_edge_search_angle |
| Variable for storing the heading of the drone (psi in radians) | |
| uint8_t | median_disparity_in_front |
| The maximum angle (in adians) to the left and right of the drone, that edges can be detected in. Edges outside of this area are considered to be in a minimum. | |
| uint16_t | median_depth_in_front |
| Variable to hold the median disparity in front of the drone. Needed to see if obstacle is there. | |
| float | distance_traveled |
| Variable to hold the median depth in front of the drone. Needed to see if obstacle is there. | |
| uint8_t | number_of_states |
| float | distance_robot_edge_goal |
| int | heat_map_type |
| Variable to hold distance from robot to edge to goal (used in EDGE_SCAN (9) state) | |
| uint8_t | allow_state_change_MOVE_TO_GOAL |
| uint8_t | allow_state_change_POSITION_GOAL |
| uint8_t | allow_state_change_WEDGEBUG_START |
| uint8_t | allow_state_change_MOVE_TO_EDGE |
| uint8_t | allow_state_change_POSITION_EDGE |
| uint8_t | allow_state_change_EDGE_SCAN |
| uint8_t | is_total_timer_on_flag |
| float | threshold_distance_to_goal_manual |
| struct ES_angles |
| #define WEDGEBUG_CAMERA_LEFT_FPS 0 |
Definition at line 65 of file wedgebug.c.
| #define WEDGEBUG_CAMERA_RIGHT_FPS 0 |
Definition at line 62 of file wedgebug.c.
| Enumerator | |
|---|---|
| DIRECT_CONTROL | |
| AUTONOMOUS_NAV | |
| AUTONOMOUS_GUIDED | |
Definition at line 220 of file wedgebug.c.
Camera focal length, in pixels (i.e. distance between camera.
| Enumerator | |
|---|---|
| MOVE_TO_GOAL | |
| POSITION_GOAL | |
| WEDGEBUG_START | |
| MOVE_TO_EDGE | |
| POSITION_EDGE | |
| EDGE_SCAN | |
Definition at line 209 of file wedgebug.c.
| uint8_t are_setpoint_and_angle_reached | ( | struct FloatVect3 * | VGOAL, |
| struct FloatVect3 * | VCURRENTPOSITION, | ||
| float | threshold_setpoint, | ||
| float | target_angle, | ||
| float | current_angle, | ||
| float | threshold_angle | ||
| ) |
Definition at line 1374 of file wedgebug.c.
References float_norm_two_angles(), float_vect3_norm_two_points(), and foo.
Here is the call graph for this function:Definition at line 1427 of file wedgebug.c.
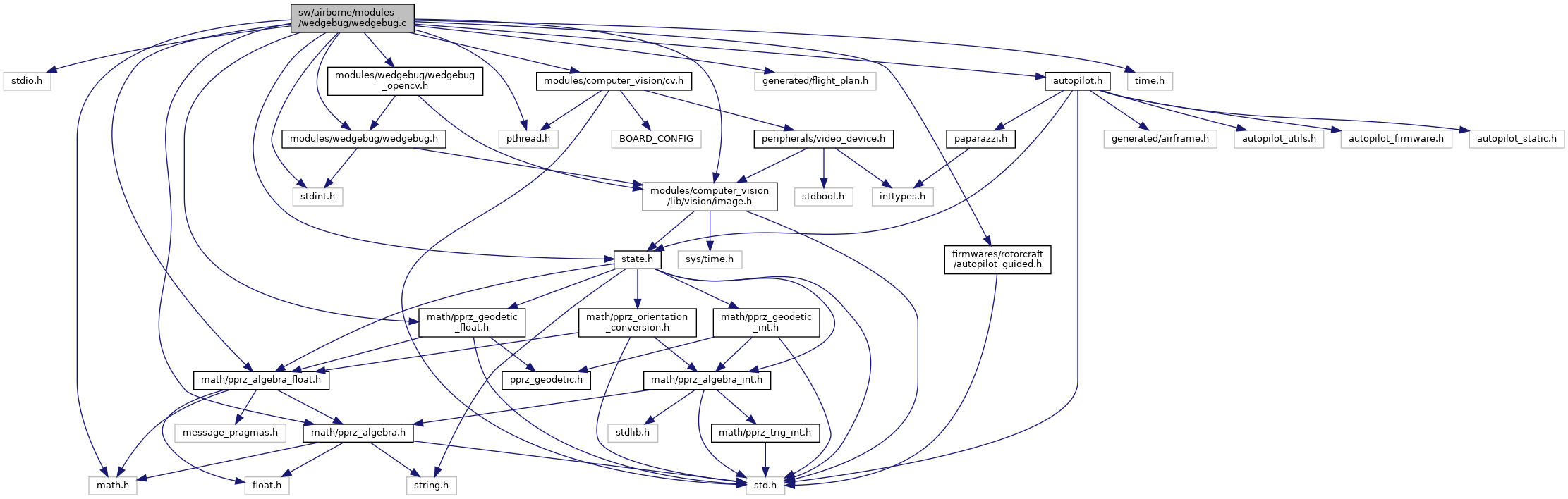
References block_size_disparities, closing_OCV(), dilation_OCV(), disp_to_depth_img(), foo, heat_map_type, image_to_grayscale(), img_depth_int16_cropped, img_disparity_int8_cropped, img_edges_int8_cropped, img_left, img_left_int8, img_middle_int8_cropped, img_right, img_right_int8, N_disparities, opening_OCV(), save_image_gray(), save_image_HM(), SBM_OCV(), SE_closing_OCV, SE_dilation_OCV_1, SE_opening_OCV, SE_sobel_OCV, sobel_OCV(), and threshold_edge_magnitude.
Here is the call graph for this function:Definition at line 1481 of file wedgebug.c.
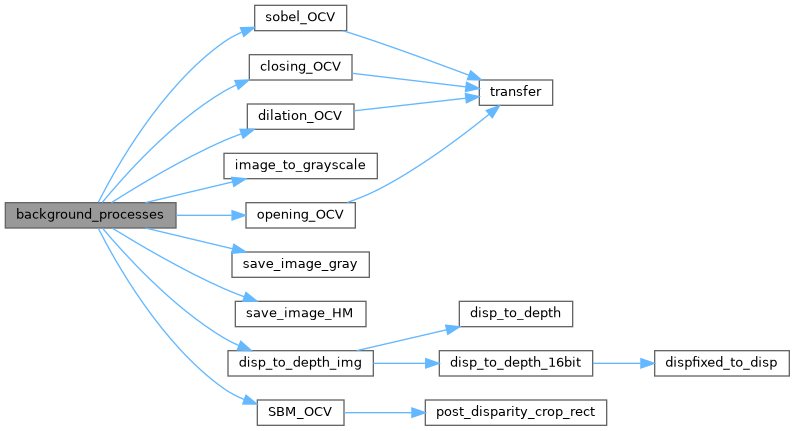
References block_size_disparities, closing_OCV(), dilation_OCV(), disp_to_depth_img(), erosion_OCV(), foo, heat_map_type, image_to_grayscale(), img_depth_int16_cropped, img_disparity_int16_cropped, img_edges_int8_cropped, img_left, img_left_int8, img_right, img_right_int8, N_disparities, opening_OCV(), save_image_gray(), save_image_HM(), SBM_OCV(), SE_closing_OCV, SE_dilation_OCV_1, SE_erosion_OCV, SE_opening_OCV, SE_sobel_OCV, sobel_OCV(), and threshold_edge_magnitude.
Referenced by wedgebug_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 535 of file wedgebug.c.
References foo, image_copy(), and img_left.
Referenced by wedgebug_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 545 of file wedgebug.c.
References foo, image_copy(), and img_right.
Referenced by wedgebug_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 712 of file wedgebug.c.
References foo.
Definition at line 691 of file wedgebug.c.
References foo.
Referenced by disp_to_depth_img(), and Vi_to_Vc().
Here is the caller graph for this function:Definition at line 705 of file wedgebug.c.
References dispfixed_to_disp(), and foo.
Referenced by disp_to_depth_img(), and Vi_to_Vc16bit().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1385 of file wedgebug.c.
References b, disp_to_depth(), disp_to_depth_16bit(), f, foo, IMAGE_GRAYSCALE, and IMAGE_INT16.
Referenced by background_processes(), and background_processes_16bit().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 698 of file wedgebug.c.
References foo.
Referenced by disp_to_depth_16bit().
Here is the caller graph for this function:| uint8_t find_best_edge_coordinates | ( | struct FloatVect3 * | VEDGECOORDINATESc, |
| struct FloatVect3 * | VTARGETc, | ||
| struct image_t * | img_edges, | ||
| struct image_t * | img_disparity, | ||
| struct crop_t * | edge_search_area, | ||
| uint8_t | threshold, | ||
| int16_t | max_confidence | ||
| ) |
Definition at line 1119 of file wedgebug.c.
References b, c_img_cropped, f, float_vect3_norm_two_points(), foo, indx1d_a(), Vi_to_Vc(), point_t::x, and point_t::y.
Here is the call graph for this function:| uint8_t find_best_edge_coordinates2 | ( | struct FloatVect3 * | VEDGECOORDINATESc, |
| struct FloatVect3 * | VTARGETc, | ||
| struct image_t * | img_edges, | ||
| struct image_t * | img_depth, | ||
| struct crop_t * | edge_search_area, | ||
| uint16_t | threshold, | ||
| int16_t | max_confidence | ||
| ) |
Definition at line 1233 of file wedgebug.c.
References c_img_cropped, f, float_vect3_norm_two_points(), foo, indx1d_a(), Vi_to_Vc_depth(), point_t::x, and point_t::y.
Referenced by wedgebug_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1356 of file wedgebug.c.
References foo.
Referenced by are_setpoint_and_angle_reached(), and is_heading_reached().
Here is the caller graph for this function:| float float_vect3_norm_two_points | ( | struct FloatVect3 * | V1, |
| struct FloatVect3 * | V2 | ||
| ) |
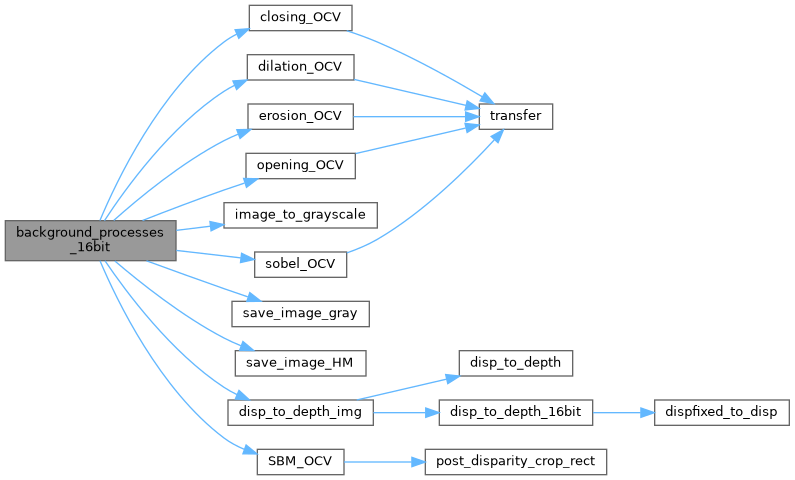
Definition at line 970 of file wedgebug.c.
References float_vect3_norm(), foo, and VECT3_DIFF.
Referenced by are_setpoint_and_angle_reached(), find_best_edge_coordinates(), find_best_edge_coordinates2(), is_setpoint_reached(), and wedgebug_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| const char * get_img_type | ( | enum image_type | img_type | ) |
Definition at line 357 of file wedgebug.c.
References foo, IMAGE_GRADIENT, IMAGE_GRAYSCALE, IMAGE_JPEG, and IMAGE_YUV422.
Referenced by show_image_data().
Here is the caller graph for this function:Definition at line 469 of file wedgebug.c.
References foo.
Referenced by median_disparity_to_point().
Here is the caller graph for this function:Definition at line 500 of file wedgebug.c.
References foo.
Referenced by median_depth_to_point().
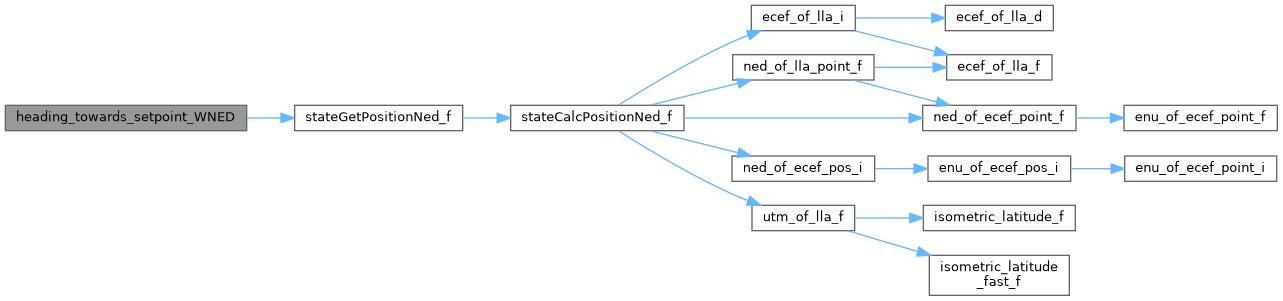
Here is the caller graph for this function:| float heading_towards_setpoint_WNED | ( | struct FloatVect3 * | VSETPOINTwned | ) |
Definition at line 991 of file wedgebug.c.
References foo, stateGetPositionNed_f(), and VECT2_DIFF.
Referenced by wedgebug_periodic().
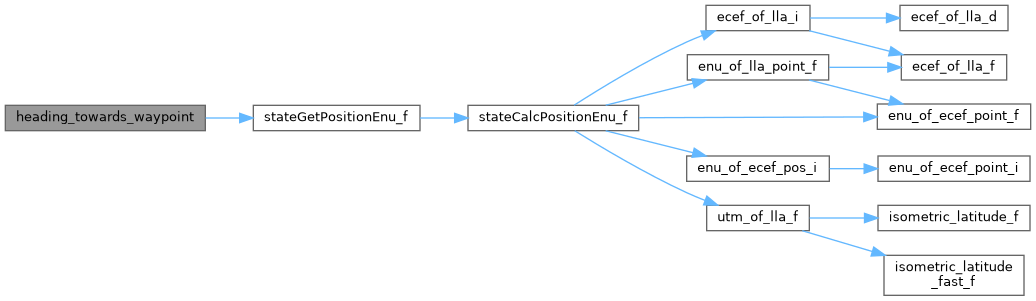
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 978 of file wedgebug.c.
References foo, stateGetPositionEnu_f(), VECT2_DIFF, WaypointX, and WaypointY.
Referenced by wedgebug_periodic().
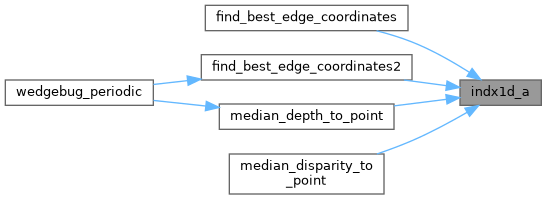
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 807 of file wedgebug.c.
References foo.
Referenced by find_best_edge_coordinates(), find_best_edge_coordinates2(), median_depth_to_point(), and median_disparity_to_point().
Here is the caller graph for this function:Definition at line 822 of file wedgebug.c.
References foo.
| int32_t indx1d_c | ( | const int32_t | y, |
| const int32_t | x, | ||
| const uint16_t | img_height, | ||
| const uint16_t | img_width | ||
| ) |
Definition at line 836 of file wedgebug.c.
References foo.
Referenced by median_depth_to_point(), and median_disparity_to_point().
Here is the caller graph for this function:Definition at line 1367 of file wedgebug.c.
References float_norm_two_angles(), and foo.
Referenced by wedgebug_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| uint8_t is_setpoint_reached | ( | struct FloatVect3 * | VGOAL, |
| struct FloatVect3 * | VCURRENTPOSITION, | ||
| float | threshold | ||
| ) |
Definition at line 1348 of file wedgebug.c.
References float_vect3_norm_two_points(), and foo.
Referenced by wedgebug_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| void kernel_create | ( | struct kernel_C1 * | kernel, |
| uint16_t | width, | ||
| uint16_t | height, | ||
| enum image_type | type | ||
| ) |
Definition at line 427 of file wedgebug.c.
References foo, IMAGE_GRADIENT, IMAGE_INT16, IMAGE_JPEG, IMAGE_YUV422, and image_t::type.
Referenced by wedgebug_init().
Here is the caller graph for this function:Definition at line 455 of file wedgebug.c.
References foo.
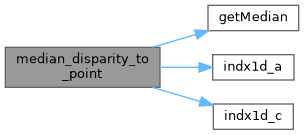
Definition at line 633 of file wedgebug.c.
References foo, IMAGE_GRAYSCALE, and IMAGE_INT16.
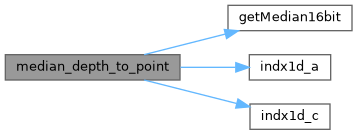
| uint16_t median_depth_to_point | ( | struct point_t * | Vi, |
| struct image_t * | img, | ||
| struct kernel_C1 * | kernel_median | ||
| ) |
Definition at line 1059 of file wedgebug.c.
References kernel_C1::buf_values, foo, getMedian16bit(), kernel_C1::h, indx1d_a(), indx1d_c(), median_kernel, and kernel_C1::w.
Referenced by wedgebug_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| uint8_t median_disparity_to_point | ( | struct point_t * | Vi, |
| struct image_t * | img, | ||
| struct kernel_C1 * | kernel_median | ||
| ) |
Definition at line 1003 of file wedgebug.c.
References kernel_C1::buf_values, foo, getMedian(), kernel_C1::h, indx1d_a(), indx1d_c(), median_kernel, and kernel_C1::w.
Here is the call graph for this function:| void post_disparity_crop_rect | ( | struct crop_t * | _img_cropped_info, |
| struct img_size_t * | _original_img_dims, | ||
| const int | disp_n, | ||
| const int | block_size | ||
| ) |
Definition at line 401 of file wedgebug.c.
References foo.
Referenced by SBM_OCV(), and wedgebug_init().
Here is the caller graph for this function:| void principal_points | ( | struct point_t * | c_output, |
| const struct point_t * | c_old_input, | ||
| struct crop_t * | img_cropped_info | ||
| ) |
Definition at line 683 of file wedgebug.c.
References foo.
Referenced by wedgebug_init().
Here is the caller graph for this function:Definition at line 420 of file wedgebug.c.
References current_state, and foo.
Referenced by wedgebug_periodic().
Here is the caller graph for this function:Definition at line 370 of file wedgebug.c.
References foo, and get_img_type().
Here is the call graph for this function:Definition at line 381 of file wedgebug.c.
References foo.
Definition at line 387 of file wedgebug.c.
References foo, and FloatRMat::m.
Definition at line 667 of file wedgebug.c.
References foo.
Definition at line 594 of file wedgebug.c.
References foo.
Definition at line 555 of file wedgebug.c.
References foo.
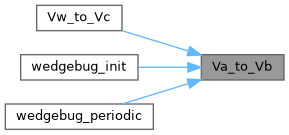
| void Va_to_Vb | ( | struct FloatVect3 * | Vb, |
| struct FloatVect3 * | Va, | ||
| struct FloatRMat * | Rba, | ||
| struct FloatVect3 * | VOa | ||
| ) |
Definition at line 851 of file wedgebug.c.
References float_rmat_vmult(), foo, and FloatVect3::x.
Referenced by Vw_to_Vc(), wedgebug_init(), and wedgebug_periodic().
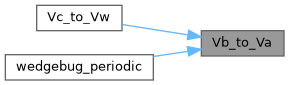
Here is the call graph for this function: Here is the caller graph for this function:| void Vb_to_Va | ( | struct FloatVect3 * | Va, |
| struct FloatVect3 * | Vb, | ||
| struct FloatRMat * | Rba, | ||
| struct FloatVect3 * | VOa | ||
| ) |
Definition at line 872 of file wedgebug.c.
References float_rmat_transp_vmult(), and foo.
Referenced by Vc_to_Vw(), and wedgebug_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| void Vc_to_Vw | ( | struct FloatVect3 * | Vw, |
| struct FloatVect3 * | Vc, | ||
| struct FloatRMat * | Rrw, | ||
| struct FloatVect3 * | VRw, | ||
| struct FloatRMat * | Rcr, | ||
| struct FloatVect3 * | VCr, | ||
| const uint8_t | verbose | ||
| ) |
Definition at line 942 of file wedgebug.c.
References foo, and Vb_to_Va().
Here is the call graph for this function:| void Vi_to_Vc | ( | struct FloatVect3 * | scene_point, |
| int32_t | image_point_y, | ||
| int32_t | image_point_x, | ||
| const uint8_t | d, | ||
| const float | b, | ||
| const uint16_t | f | ||
| ) |
Definition at line 722 of file wedgebug.c.
References disp_to_depth(), and foo.
Referenced by find_best_edge_coordinates().
Here is the call graph for this function: Here is the caller graph for this function:| void Vi_to_Vc16bit | ( | struct FloatVect3 * | scene_point, |
| int32_t | image_point_y, | ||
| int32_t | image_point_x, | ||
| const uint16_t | d, | ||
| const float | b, | ||
| const uint16_t | f | ||
| ) |
Definition at line 774 of file wedgebug.c.
References disp_to_depth_16bit(), and foo.
Here is the call graph for this function:| void Vi_to_Vc_depth | ( | struct FloatVect3 * | scene_point, |
| int32_t | image_point_y, | ||
| int32_t | image_point_x, | ||
| const float | depth, | ||
| const uint16_t | f | ||
| ) |
Definition at line 755 of file wedgebug.c.
References foo.
Referenced by find_best_edge_coordinates2().
Here is the caller graph for this function:| void Vw_to_Vc | ( | struct FloatVect3 * | Vc, |
| struct FloatVect3 * | Vw, | ||
| struct FloatRMat * | Rrw, | ||
| struct FloatVect3 * | VRw, | ||
| struct FloatRMat * | Rcr, | ||
| struct FloatVect3 * | VCr, | ||
| const uint8_t | verbose | ||
| ) |
Definition at line 886 of file wedgebug.c.
References foo, and Va_to_Vb().
Here is the call graph for this function:Below this median depth (cm), an obstacle is considered to block the way (i.e. the blocking obstacle needs to be close)
Below this depth (cm) edges are eligible for the WedgeBug algorithm
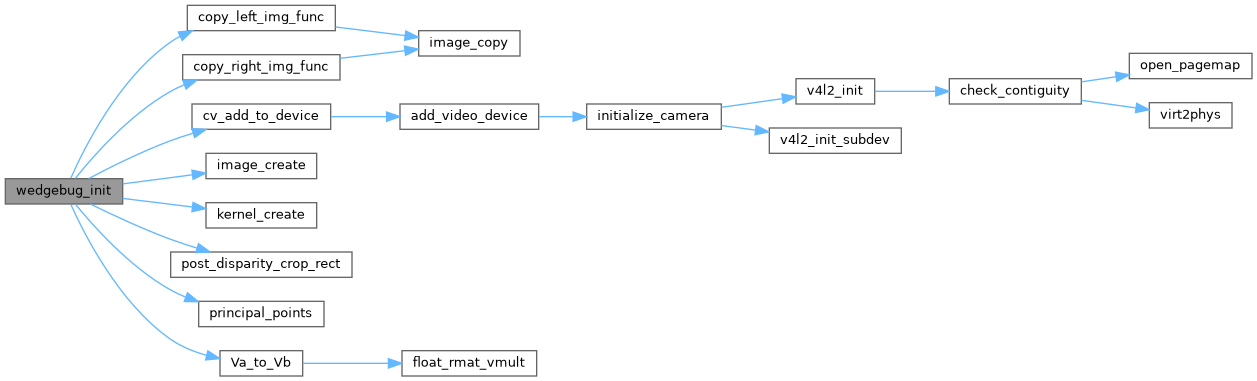
Definition at line 1584 of file wedgebug.c.
References allow_state_change_EDGE_SCAN, allow_state_change_MOVE_TO_EDGE, allow_state_change_MOVE_TO_GOAL, allow_state_change_POSITION_EDGE, allow_state_change_POSITION_GOAL, allow_state_change_WEDGEBUG_START, block_size_disparities, kernel_C1::buf_size, c_img, c_img_cropped, clock_background_processes, clock_FSM, clock_total_time, clock_total_time_current, clock_total_time_previous, copy_left_img_func(), copy_right_img_func(), cv_add_to_device(), distance_robot_edge_goal, distance_traveled, edge_found_macro_confidence, edge_search_area, foo, free_path_confidence, image_t::h, img_size_t::h, crop_t::h, kernel_C1::h, heading_confidence, heat_map_type, image_create(), IMAGE_GRAYSCALE, IMAGE_INT16, IMAGE_YUV422, img_cropped_dims, img_cropped_info, img_depth_int16_cropped, img_dims, img_disparity_int16_cropped, img_disparity_int8_cropped, img_edges_int8_cropped, img_left, img_left_int8, img_left_int8_cropped, img_middle_int16_cropped, img_middle_int8_cropped, img_right, img_right_int8, initial_heading, ES_angles::initiated, is_edge_found_macro_flag, is_edge_found_micro_flag, is_heading_reached_flag, ES_angles::is_left_reached_flag, is_mode_changed_flag, is_no_edge_found_flag, is_obstacle_detected_flag, is_path_free_flag, ES_angles::is_right_reached_flag, is_setpoint_reached_flag, is_start_reached_flag, is_state_changed_flag, is_total_timer_on_flag, K_median_h, K_median_w, kernel_create(), kernel_median_dims, FloatRMat::m, max_edge_found_macro_confidence, max_edge_found_micro_confidence, max_free_path_confidence, max_heading_confidence, max_no_edge_found_confidence, max_obstacle_confidence, max_position_confidence, median_kernel, median_kernel16bit, N_disparities, no_edge_found_confidence, number_of_states, obstacle_confidence, position_confidence, post_disparity_crop_rect(), previous_mode, previous_state, principal_points(), Rcr, Rwnedwenu, save_images_flag, SE_closing_OCV, SE_dilation_OCV_1, SE_dilation_OCV_2, SE_erosion_OCV, SE_opening_OCV, SE_sobel_OCV, threshold_depth_of_edges, threshold_distance_to_angle, threshold_distance_to_goal, threshold_distance_to_goal_direct, threshold_distance_to_goal_manual, threshold_edge_magnitude, threshold_median_depth, kernel_C1::type, Va_to_Vb(), VCr, VDISTANCEPOSITIONwned, VGOALwenu, VGOALwned, VNEDwenu, VSTARTwenu, VSTARTwned, image_t::w, img_size_t::w, crop_t::w, kernel_C1::w, WaypointAlt, WaypointX, WaypointY, WEDGEBUG_CAMERA_LEFT_FPS, WEDGEBUG_CAMERA_RIGHT_FPS, FloatVect3::x, point_t::x, crop_t::x, FloatVect3::y, point_t::y, crop_t::y, and FloatVect3::z.
Here is the call graph for this function:Definition at line 1837 of file wedgebug.c.
References allow_state_change_EDGE_SCAN, allow_state_change_MOVE_TO_EDGE, allow_state_change_MOVE_TO_GOAL, allow_state_change_POSITION_EDGE, allow_state_change_WEDGEBUG_START, AP_MODE_ATTITUDE_DIRECT, AP_MODE_ATTITUDE_Z_HOLD, AP_MODE_GUIDED, AP_MODE_NAV, AUTONOMOUS_GUIDED, AUTONOMOUS_NAV, autopilot_get_mode(), autopilot_guided_goto_ned(), background_processes_16bit(), c_img_cropped, clock_background_processes, clock_FSM, clock_total_time, clock_total_time_current, clock_total_time_previous, counter_cycles, counter_state, current_mode, current_state, DIRECT_CONTROL, distance_robot_edge_goal, distance_traveled, edge_found_macro_confidence, EDGE_SCAN, edge_search_area, find_best_edge_coordinates2(), FLOAT_ANGLE_NORMALIZE, float_vect3_norm_two_points(), float_vect_copy(), foo, free_path_confidence, guidance_h_hover_enter(), guidance_h_set_heading(), guidance_h_set_pos(), guidance_v_set_z(), heading, heading_confidence, ES_angles::heading_initial, ES_angles::heading_max_left, ES_angles::heading_max_right, heading_towards_setpoint_WNED(), heading_towards_waypoint(), heat_map_type, img_depth_int16_cropped, img_disparity_int8_cropped, img_edges_int8_cropped, img_left_int8, img_middle_int8_cropped, img_right_int8, initial_heading, ES_angles::initiated, is_edge_found_macro_flag, is_edge_found_micro_flag, is_heading_reached(), is_heading_reached_flag, ES_angles::is_left_reached_flag, is_mode_changed_flag, is_no_edge_found_flag, is_obstacle_detected_flag, is_path_free_flag, ES_angles::is_right_reached_flag, is_setpoint_reached(), is_setpoint_reached_flag, is_start_reached_flag, is_state_changed_flag, FloatRMat::m, max_edge_found_macro_confidence, max_edge_found_micro_confidence, max_edge_search_angle, max_free_path_confidence, max_heading_confidence, max_no_edge_found_confidence, max_obstacle_confidence, max_position_confidence, median_depth_in_front, median_depth_to_point(), median_kernel16bit, MOVE_TO_EDGE, MOVE_TO_GOAL, no_edge_found_confidence, number_of_states, obstacle_confidence, position_confidence, POSITION_EDGE, POSITION_GOAL, previous_mode, previous_state, FloatEulers::psi, Rcr, Rrwned, Rwnedwenu, save_image_gray(), save_image_HM(), save_images_flag, set_state(), stateGetNedToBodyEulers_f(), stateGetNedToBodyRMat_f(), stateGetPositionNed_f(), threshold_depth_of_edges, threshold_distance_to_angle, threshold_distance_to_goal, threshold_distance_to_goal_direct, threshold_median_depth, time, time_state, Va_to_Vb(), Vb_to_Va(), VCr, VDISTANCEPOSITIONwned, VEDGECOORDINATESc, VEDGECOORDINATESr, VEDGECOORDINATESwenu, VEDGECOORDINATESwned, VGOALc, VGOALr, VGOALwned, VHOLDINGPOINTwned, VNEDwenu, VPBESTEDGECOORDINATESwned, VRwned, WEDGEBUG_START, FloatVect3::x, NedCoor_f::x, FloatVect3::y, NedCoor_f::y, FloatVect3::z, and NedCoor_f::z.
Here is the call graph for this function:| uint8_t allow_state_change_EDGE_SCAN |
Definition at line 276 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t allow_state_change_MOVE_TO_EDGE |
Definition at line 274 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t allow_state_change_MOVE_TO_GOAL |
Definition at line 271 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t allow_state_change_POSITION_EDGE |
Definition at line 275 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t allow_state_change_POSITION_GOAL |
Definition at line 272 of file wedgebug.c.
Referenced by wedgebug_init().
| uint8_t allow_state_change_WEDGEBUG_START |
Definition at line 273 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| float b |
Definition at line 202 of file wedgebug.c.
Referenced by calc_ntc(), cmp_array(), cmp_flow(), cmp_i(), cmpfunc(), cmpTimeUs(), dim_mod(), disp_to_depth_img(), dqrls(), dqrlss(), dqrsl(), ekf_set_diag(), err_nd(), err_sum_nd(), find_best_edge_coordinates(), float_from_buf(), float_mat_combine(), float_mat_copy(), float_mat_diff(), float_mat_mul(), float_mat_mul_copy(), float_mat_mul_transpose(), float_mat_sum(), float_mat_sum_scaled(), float_mat_vect_mul(), float_vect_add(), float_vect_copy(), float_vect_diff(), float_vect_dot_product(), float_vect_mul(), float_vect_sub(), float_vect_sum(), get_two_intersects(), gvf_ellipse_info(), gvf_get_two_intersects(), gvf_ik_line(), gvf_line(), gvf_line_info(), gvf_sin_info(), image_switch(), init_fourth_order_high_pass(), int32_gcd(), int32_mat_mul(), int32_vect_add(), int32_vect_copy(), int32_vect_diff(), int32_vect_mul(), int32_vect_sub(), int32_vect_sum(), light_ws2812_arch_set(), lla_of_ecef_d(), lla_of_ecef_f(), Matrix_Multiply(), nav_goto_block(), nav_gvf_ellipse_wp(), nav_gvf_ellipse_XY(), nav_gvf_ik_ellipse_wp(), nav_gvf_ik_ellipse_XY(), nav_gvf_ik_line_wp_heading(), nav_gvf_ik_line_XY_heading(), nav_gvf_ik_sin_XY_alpha(), nav_gvf_line_wp_heading(), nav_gvf_line_XY_heading(), nav_gvf_sin_XY_alpha(), notch_filter_update(), notch_filter_update(), parse_mf_daq_msg(), pprz_mode_update(), pprz_qr_float(), pprz_svd_solve_float(), px4flash_event(), pythag(), qr_solve(), qr_solve_wrapper(), quat_from_earth_cmd_f(), r8mat_l_solve(), r8mat_lt_solve(), set_nav_block(), slcan_event(), syslink_compute_cksum(), syslink_put_byte(), uint16_from_buf(), and wls_alloc().
| int block_size_disparities = 25 |
Number of disparity levels (0-this number)
Definition at line 256 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
| struct point_t c_img |
Definition at line 183 of file wedgebug.c.
Referenced by wedgebug_init().
| struct point_t c_img_cropped |
Principal point of normal camera images.
Definition at line 184 of file wedgebug.c.
Referenced by find_best_edge_coordinates(), find_best_edge_coordinates2(), wedgebug_init(), and wedgebug_periodic().
| clock_t clock_background_processes |
Definition at line 249 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| clock_t clock_FSM |
Definition at line 250 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| clock_t clock_total_time |
Definition at line 246 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| clock_t clock_total_time_current |
Definition at line 247 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| clock_t clock_total_time_previous |
Definition at line 248 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| double counter_cycles |
Definition at line 245 of file wedgebug.c.
Referenced by wedgebug_periodic().
| double counter_state[NUMBER_OF_STATES] |
Definition at line 244 of file wedgebug.c.
Referenced by wedgebug_periodic().
| enum control_mode_state current_mode |
Definition at line 226 of file wedgebug.c.
Referenced by wedgebug_periodic().
| enum navigation_state current_state |
Definition at line 217 of file wedgebug.c.
Referenced by set_state(), sts3032_event(), and wedgebug_periodic().
| float distance_robot_edge_goal |
Definition at line 265 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| float distance_traveled |
Variable to hold the median depth in front of the drone. Needed to see if obstacle is there.
Definition at line 263 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int16_t edge_found_macro_confidence |
This is the confidence that the desired heading is reached.
Definition at line 159 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| struct crop_t edge_search_area |
Principal point of cropped camera images.
Definition at line 187 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
Camera baseline, in meters (i.e. horizontal distance between the two cameras of the stereo setup)
Definition at line 204 of file wedgebug.c.
Referenced by delayed_first_order_lowpass_initialize(), delayed_first_order_lowpass_propagate(), delayed_first_order_lowpass_set_delay(), delayed_first_order_lowpass_set_omega(), disp_to_depth_img(), ecef_of_lla_d(), ecef_of_lla_f(), eff_scheduling_falcon_report(), encoder_amt22_periodic(), esc32_get_float(), esc32_put_float(), find_best_edge_coordinates(), find_best_edge_coordinates2(), float_from_buf(), gc_of_gd_lat_d(), image_labeling(), int32_vect2_normalize(), lla_of_ecef_d(), lla_of_ecef_f(), runge_kutta_1_float(), runge_kutta_2_float(), runge_kutta_4_float(), srf08_event(), write_exif_jpeg(), xgeqrf(), and xgeqrf_f().
| int16_t free_path_confidence |
This is the confidence that an obstacle was spotted.
Definition at line 154 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| float heading |
Definition at line 258 of file wedgebug.c.
Referenced by ahrs_fc_realign_heading(), ahrs_fc_update_heading(), ahrs_icq_realign_heading(), ahrs_icq_update_heading(), autopilot_guided_goto_ned(), autopilot_guided_move_ned(), calculateForwards(), calculateForwards(), gps_datalink_parse_EXTERNAL_POSE(), gps_datalink_parse_EXTERNAL_POSE_SMALL(), guidance_h_set_heading(), guidance_indi_run(), gvf_ik_line(), gvf_line(), increase_nav_heading(), increase_nav_heading(), mavlink_send_global_position_int(), mavlink_send_vfr_hud(), nav_gvf_ik_line_wp_heading(), nav_gvf_ik_line_XY_heading(), nav_gvf_line_wp_heading(), nav_gvf_line_XY_heading(), quat_from_earth_cmd_f(), quat_from_earth_cmd_i(), stab_sp_from_ltp_f(), stab_sp_from_ltp_i(), stab_sp_rotate_f(), stab_sp_rotate_i(), stabilization_attitude_get_heading_f(), stabilization_attitude_get_heading_i(), stabilization_attitude_read_rc_setpoint_eulers(), stabilization_attitude_read_rc_setpoint_eulers_f(), stereo_avoid_run(), stereocam_droplet_periodic(), target_get_pos(), and wedgebug_periodic().
| int16_t heading_confidence |
This is the confidence that the desired position was reached.
Definition at line 156 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int heat_map_type |
Variable to hold distance from robot to edge to goal (used in EDGE_SCAN (9) state)
Definition at line 266 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), wedgebug_init(), and wedgebug_periodic().
| struct img_size_t img_cropped_dims |
Dimensions of images captured by the camera (left and right have same dimension)
Definition at line 97 of file wedgebug.c.
Referenced by wedgebug_init().
| struct crop_t img_cropped_info |
Definition at line 92 of file wedgebug.c.
Referenced by SBM_OCV(), and wedgebug_init().
| struct image_t img_depth_int16_cropped |
Image obtained after simple block matching.
Definition at line 80 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), wedgebug_init(), and wedgebug_periodic().
| struct img_size_t img_dims |
Definition at line 95 of file wedgebug.c.
Referenced by wedgebug_init().
| struct image_t img_disparity_int16_cropped |
Image obtained from the external sobel edge detection function = sobel_OCV.
Definition at line 84 of file wedgebug.c.
Referenced by background_processes_16bit(), and wedgebug_init().
| struct image_t img_disparity_int8_cropped |
Image obtained from right camera, converted into 8bit gray image.
Definition at line 79 of file wedgebug.c.
Referenced by background_processes(), wedgebug_init(), and wedgebug_periodic().
| struct image_t img_edges_int8_cropped |
Definition at line 82 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), wedgebug_init(), and wedgebug_periodic().
| struct image_t img_left |
Definition at line 74 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), copy_left_img_func(), SBM_OCV(), and wedgebug_init().
| struct image_t img_left_int8 |
Image obtained from right camera (UYVY format)
Definition at line 76 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), wedgebug_init(), and wedgebug_periodic().
| struct image_t img_left_int8_cropped |
Image obtained from left camera, converted into 8bit gray image.
Definition at line 77 of file wedgebug.c.
Referenced by wedgebug_init().
| struct image_t img_middle_int16_cropped |
Definition at line 85 of file wedgebug.c.
Referenced by wedgebug_init().
| struct image_t img_middle_int8_cropped |
Image holding depth values (cm) obtained from the disparity image.
Definition at line 81 of file wedgebug.c.
Referenced by background_processes(), wedgebug_init(), and wedgebug_periodic().
| struct image_t img_right |
Image obtained from left camera (UYVY format)
Definition at line 75 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), copy_right_img_func(), SBM_OCV(), and wedgebug_init().
| struct image_t img_right_int8 |
Definition at line 78 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), wedgebug_init(), and wedgebug_periodic().
| struct ES_angles initial_heading |
Definition at line 239 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_edge_found_macro_flag |
Set to 1 if heading is reached, 0 otherwise.
Definition at line 175 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_edge_found_micro_flag |
Set to 1 if best edge (according to macro confidence) was found, 0 otherwise.
Definition at line 176 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_heading_reached_flag |
Set to 1 if no obstacle is detected, 0 otherwise.
Definition at line 174 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_mode_changed_flag |
Set to 1 if state was changed, 0 otherwise.
Definition at line 179 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_no_edge_found_flag |
Set to 1 if best edge (according to micro confidence) was found, 0 otherwise.
Definition at line 177 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_obstacle_detected_flag |
Set to 1 if setpoint is reached, 0 otherwise.
Definition at line 172 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_path_free_flag |
Set to 1 if obstacle is detected, 0 otherwise.
Definition at line 173 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_setpoint_reached_flag |
Definition at line 171 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_start_reached_flag |
This is the max confidence that no edges were found.
Definition at line 170 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_state_changed_flag |
Set to 1 if no edge was identified, 0 otherwise.
Definition at line 178 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t is_total_timer_on_flag |
Definition at line 279 of file wedgebug.c.
Referenced by wedgebug_init().
| uint16_t K_median_h |
Width of kernel for the median kernel.
Definition at line 113 of file wedgebug.c.
Referenced by wedgebug_init().
| uint16_t K_median_w |
SE size for the Sobel operation, to detect edges.
Definition at line 112 of file wedgebug.c.
Referenced by wedgebug_init().
| struct img_size_t kernel_median_dims |
Dimension of image after it has been cropped to remove pixel error due to block matching limitations.
Definition at line 99 of file wedgebug.c.
Referenced by wedgebug_init().
| int16_t max_edge_found_macro_confidence |
This is the max confidence that edges (micro-see above) were found.
Definition at line 166 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int16_t max_edge_found_micro_confidence |
This is the max confidence that a specific heading was reached.
Definition at line 165 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| float max_edge_search_angle |
Variable for storing the heading of the drone (psi in radians)
Definition at line 259 of file wedgebug.c.
Referenced by wedgebug_periodic().
| int16_t max_free_path_confidence |
This is the max confidence that an obstacle was spotted.
Definition at line 162 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int16_t max_heading_confidence |
This is the max confidence that a specific position was reached.
Definition at line 164 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int16_t max_no_edge_found_confidence |
This is the max confidence that edges (macro-see above were found.
Definition at line 167 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int16_t max_obstacle_confidence |
This is the confidence that no edge was found.
Definition at line 161 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int16_t max_position_confidence |
This is the max confidence that an obstacle was not spotted.
Definition at line 163 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint16_t median_depth_in_front |
Variable to hold the median disparity in front of the drone. Needed to see if obstacle is there.
Definition at line 262 of file wedgebug.c.
Referenced by wedgebug_periodic().
| uint8_t median_disparity_in_front |
The maximum angle (in adians) to the left and right of the drone, that edges can be detected in. Edges outside of this area are considered to be in a minimum.
Definition at line 261 of file wedgebug.c.
| struct kernel_C1 median_kernel |
Dimensions of the kernel that detect median disparity in front of drone (for obstacle detection)
Definition at line 102 of file wedgebug.c.
Referenced by median_depth_to_point(), median_disparity_to_point(), and wedgebug_init().
| struct kernel_C1 median_kernel16bit |
Definition at line 103 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int min_disparity = 0 |
Block size used for the block matching (SBM) function.
Definition at line 257 of file wedgebug.c.
Referenced by CN_escape_velocity(), CN_potential_heading(), CN_potential_velocity(), CN_vector_escape_velocity(), and CN_vector_velocity().
| int N_disparities = 64 |
Variable that saves previous mode to control the drone, for some memory.
Definition at line 255 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
| int16_t no_edge_found_confidence |
This is the confidence that an edge was found - outside of the find_best_edge_coordinates function.
Definition at line 160 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t number_of_states |
Definition at line 264 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int16_t obstacle_confidence |
Below this depth (m) edges are eligible for the WedgeBug algorithm (i.e. edges cannot be very far away)
Definition at line 153 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int16_t position_confidence |
This is the confidence that no obstacle was spotted.
Definition at line 155 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t previous_mode |
Variable that saves previous state the state machine was in, for some memory.
Definition at line 254 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t previous_state |
Definition at line 253 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| struct FloatRMat Rcr |
Definition at line 198 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| struct FloatRMat Rrwned |
Definition at line 195 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatRMat Rwnedwenu |
This structure holds information about the window in which edges are searched in.
Definition at line 192 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t save_images_flag |
Set to 1 if control mode of drone is changed, 0 otherwise.
Definition at line 180 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| int SE_closing_OCV |
SE size for the opening operation.
Definition at line 107 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
| int SE_dilation_OCV_1 |
SE size for the closing operation.
Definition at line 108 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
| int SE_dilation_OCV_2 |
SE size for the first dilation operation.
Definition at line 109 of file wedgebug.c.
Referenced by wedgebug_init().
| int SE_erosion_OCV |
SE size for the second dilation operation (see state 3 "WEDGEBUG_START" and state 6 "POSITION_EDGE" )
Definition at line 110 of file wedgebug.c.
Referenced by background_processes_16bit(), and wedgebug_init().
| int SE_opening_OCV |
Definition at line 106 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
| int SE_sobel_OCV |
SE size for the erosion operation (see state 3 "WEDGEBUG_START" and state 6 "POSITION_EDGE", its needed to "drag" the depth of the foreground objects over the edges detected)
Definition at line 111 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
| uint16_t threshold_depth_of_edges |
Below this median disparity, an obstacle is considered to block the way (i.e. the blocking obstacle need to be close)
Below this median depth (cm), an obstacle is considered to block the way (i.e. the blocking obstacle needs to be close)
Definition at line 150 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t threshold_disparity_of_edges |
Above this median disparity, an obstacle is considered to block the way (i.e. the blocking obstacle need to be close)
Definition at line 144 of file wedgebug.c.
| float threshold_distance_to_angle |
Below this distance (in meters) it is considered that the robot has reached the goal.
Definition at line 146 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| float threshold_distance_to_goal |
Above this disparity edges are eligible for WedgeBug algorithm (i.e. edges cannot be very far away)
Definition at line 145 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| float threshold_distance_to_goal_direct |
Below this distance (in radians) it is considered that the robot has reached the target angle.
Definition at line 147 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| float threshold_distance_to_goal_manual |
Definition at line 280 of file wedgebug.c.
Referenced by wedgebug_init().
| int threshold_edge_magnitude |
Declared vector of coordinates of previous "best" edge detected in NED world coordinate system.
Below this depth (cm) edges are eligible for the WedgeBug algorith.
Definition at line 142 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
| uint16_t threshold_median_depth |
Below this distance (in meters) it is considered that the robot has reached the goal, in DIRECT_CONTROL mode.
Definition at line 149 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| uint8_t threshold_median_disparity |
Edges with a magnitude above this value are detected. Above this value, edges are given the value 127, otherwise they are given the value zero.
Definition at line 143 of file wedgebug.c.
| double time_state[NUMBER_OF_STATES] |
Definition at line 243 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatVect3 VCr |
Definition at line 199 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| struct FloatVect3 VDISTANCEPOSITIONwned |
Declared vector of coordinates of "best" edge detected in ENU world coordinate system.
Definition at line 134 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| struct FloatVect3 VEDGECOORDINATESc |
Declared vector of coordinates of goal in camera coordinate system.
Definition at line 126 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatVect3 VEDGECOORDINATESr |
Declared vector of coordinates of "best" edge detected in camera coordinate system.
Definition at line 128 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatVect3 VEDGECOORDINATESwenu |
Declared vector of coordinates of "best" edge detected in NED world coordinate system.
Definition at line 132 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatVect3 VEDGECOORDINATESwned |
Declared vector of coordinates of "best" edge detected in robot coordinate system.
Definition at line 130 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatVect3 VGOALc |
Declared vector of coordinates of goal in robot coordinate system.
Definition at line 124 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatVect3 VGOALr |
Declared vector of coordinates of goal in NED world coordinate system.
Definition at line 123 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatVect3 VGOALwenu |
Declared vector of coordinates of start position in NED world coordinate system.
Definition at line 121 of file wedgebug.c.
Referenced by wedgebug_init().
| struct FloatVect3 VGOALwned |
Declared vector of coordinates of goal in ENU world coordinate system.
Definition at line 122 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| struct FloatVect3 VHOLDINGPOINTwned |
Declared a vector to hold the current position, which is needed for calculating the distance traveled.
Definition at line 136 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatVect3 VNEDwenu |
Definition at line 193 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
| struct FloatVect3 VPBESTEDGECOORDINATESwned |
Declared a vector to hold the position of a holding point (offten used to make sure drone stays still before stuff happens)
Definition at line 138 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatVect3 VRwned |
Definition at line 196 of file wedgebug.c.
Referenced by wedgebug_periodic().
| struct FloatVect3 VSTARTwenu |
Height of kernel for the median kernel.
Definition at line 118 of file wedgebug.c.
Referenced by wedgebug_init().
| struct FloatVect3 VSTARTwned |
Declared vector of coordinates of start position in ENU world coordinate system.
Definition at line 120 of file wedgebug.c.
Referenced by wedgebug_init().