|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "modules/meteo/wind_estimation_quadrotor.h"#include "filters/linear_kalman_filter.h"#include "math/pprz_isa.h"#include "state.h"#include "generated/airframe.h"#include "modules/datalink/downlink.h"#include "generated/modules.h"#include "modules/core/abi.h"#include "modules/air_data/air_data.h"#include "modules/datalink/telemetry.h" Include dependency graph for wind_estimation_quadrotor.c:
Include dependency graph for wind_estimation_quadrotor.c:Go to the source code of this file.
Data Structures | |
| struct | wind_estimation_quadrotor |
Macros | |
| #define | WE_QUAD_STATUS_IDLE 0 |
| #define | WE_QUAD_STATUS_RUN 1 |
| #define | WE_QUAD_STATE_SIZE 4 |
| #define | WE_QUAD_CMD_SIZE 2 |
| #define | WE_QUAD_MEAS_SIZE 2 |
| #define | WE_QUAD_VA_X 0 |
| #define | WE_QUAD_W_X 1 |
| #define | WE_QUAD_VA_Y 2 |
| #define | WE_QUAD_W_Y 3 |
| #define | WE_QUAD_P0_VA 1.f |
| #define | WE_QUAD_P0_W 1.f |
| #define | WE_QUAD_Q_VA .05f |
| #define | WE_QUAD_Q_W .001f |
| #define | WE_QUAD_R .5f |
| #define | WE_QUAD_UPDATE_STATE TRUE |
Variables | |
| static const float | we_dt = WIND_ESTIMATION_QUADROTOR_PERIODIC_PERIOD |
| static struct wind_estimation_quadrotor | we_quad |
| struct wind_estimation_quadrotor_params | we_quad_params |
Definition in file wind_estimation_quadrotor.c.
| struct wind_estimation_quadrotor |
Definition at line 81 of file wind_estimation_quadrotor.c.
Collaboration diagram for wind_estimation_quadrotor:| Data Fields | ||
|---|---|---|
| struct linear_kalman_filter | filter | |
| uint8_t | status | |
| #define WE_QUAD_CMD_SIZE 2 |
Definition at line 44 of file wind_estimation_quadrotor.c.
| #define WE_QUAD_MEAS_SIZE 2 |
Definition at line 45 of file wind_estimation_quadrotor.c.
Definition at line 53 of file wind_estimation_quadrotor.c.
Definition at line 57 of file wind_estimation_quadrotor.c.
Definition at line 61 of file wind_estimation_quadrotor.c.
Definition at line 65 of file wind_estimation_quadrotor.c.
Definition at line 69 of file wind_estimation_quadrotor.c.
| #define WE_QUAD_STATE_SIZE 4 |
Definition at line 43 of file wind_estimation_quadrotor.c.
| #define WE_QUAD_STATUS_IDLE 0 |
Definition at line 40 of file wind_estimation_quadrotor.c.
| #define WE_QUAD_STATUS_RUN 1 |
Definition at line 41 of file wind_estimation_quadrotor.c.
Definition at line 74 of file wind_estimation_quadrotor.c.
| #define WE_QUAD_VA_X 0 |
Definition at line 47 of file wind_estimation_quadrotor.c.
| #define WE_QUAD_VA_Y 2 |
Definition at line 49 of file wind_estimation_quadrotor.c.
| #define WE_QUAD_W_X 1 |
Definition at line 48 of file wind_estimation_quadrotor.c.
| #define WE_QUAD_W_Y 3 |
Definition at line 50 of file wind_estimation_quadrotor.c.
|
static |
Definition at line 213 of file wind_estimation_quadrotor.c.
References dev, wind_estimation_quadrotor::filter, float_vect2_norm(), foo, we_quad, WE_QUAD_VA_X, WE_QUAD_VA_Y, WE_QUAD_W_X, WE_QUAD_W_Y, and linear_kalman_filter::X.
Referenced by wind_estimation_quadrotor_init().
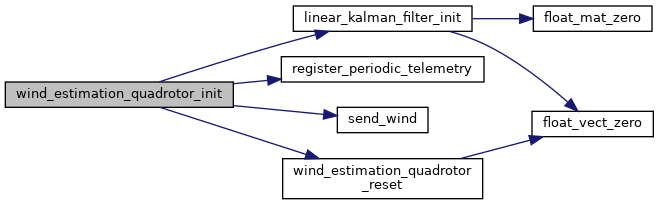
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 98 of file wind_estimation_quadrotor.c.
References linear_kalman_filter::A, linear_kalman_filter::B, linear_kalman_filter::C, DefaultPeriodic, wind_estimation_quadrotor::filter, foo, linear_kalman_filter_init(), linear_kalman_filter::Q, wind_estimation_quadrotor_params::Q_va, wind_estimation_quadrotor_params::Q_w, linear_kalman_filter::R, wind_estimation_quadrotor_params::R, register_periodic_telemetry(), send_wind(), wind_estimation_quadrotor::status, we_dt, we_quad, WE_QUAD_CMD_SIZE, WE_QUAD_MEAS_SIZE, we_quad_params, WE_QUAD_Q_VA, WE_QUAD_Q_W, WE_QUAD_R, WE_QUAD_STATE_SIZE, WE_QUAD_STATUS_IDLE, and wind_estimation_quadrotor_reset().
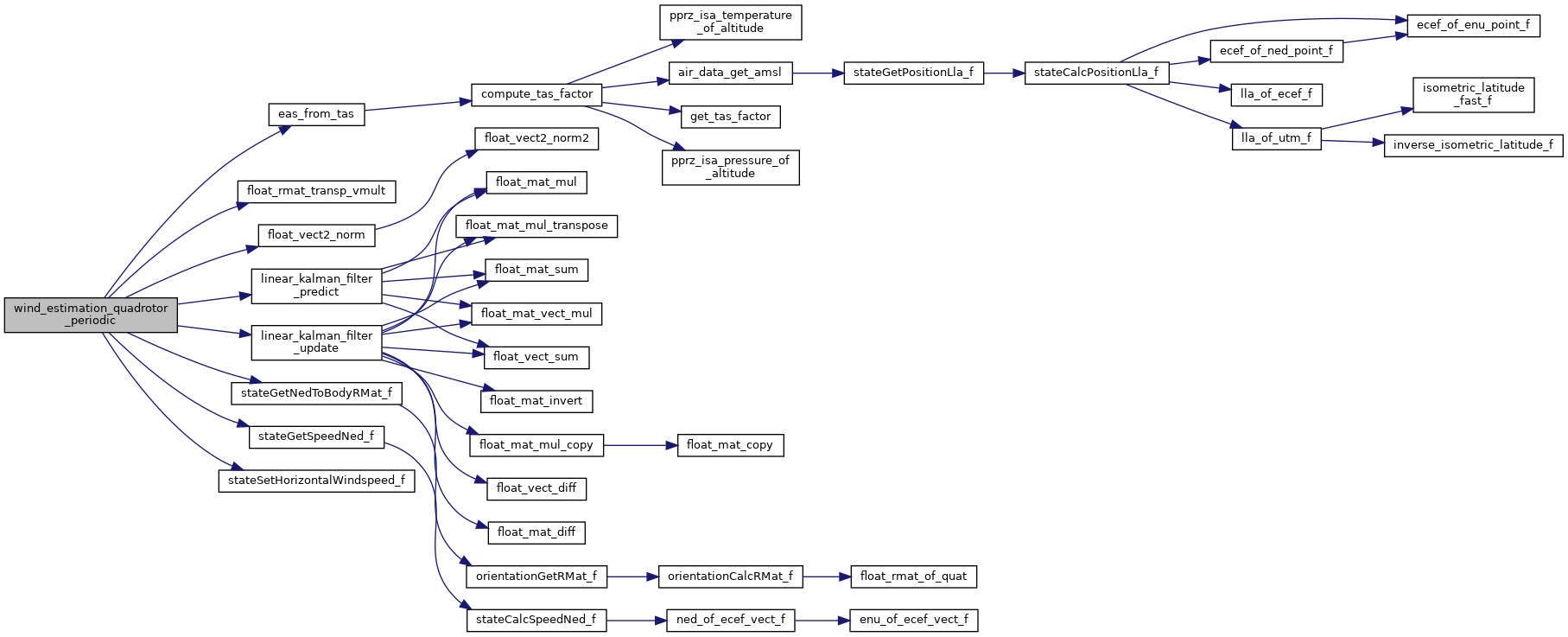
Here is the call graph for this function:Definition at line 133 of file wind_estimation_quadrotor.c.
References AIRSPEED_WE_QUAD_ID, eas_from_tas(), wind_estimation_quadrotor::filter, float_rmat_transp_vmult(), float_vect2_norm(), foo, linear_kalman_filter_predict(), linear_kalman_filter_update(), MAT33_ELMT, PPRZ_ISA_GRAVITY, stateGetNedToBodyRMat_f(), stateGetSpeedNed_f(), stateSetHorizontalWindspeed_f(), we_quad, WE_QUAD_CMD_SIZE, WE_QUAD_MEAS_SIZE, WE_QUAD_VA_X, WE_QUAD_VA_Y, WE_QUAD_W_X, WE_QUAD_W_Y, linear_kalman_filter::X, NedCoor_f::x, and NedCoor_f::y.
Here is the call graph for this function:Definition at line 208 of file wind_estimation_quadrotor.c.
References DefaultChannel, DefaultDevice, wind_estimation_quadrotor::filter, foo, we_quad, WE_QUAD_STATE_SIZE, and linear_kalman_filter::X.
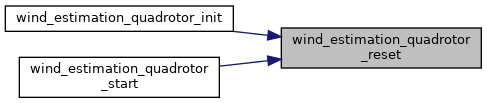
Definition at line 89 of file wind_estimation_quadrotor.c.
References wind_estimation_quadrotor::filter, float_vect_zero(), linear_kalman_filter::P, we_quad, WE_QUAD_P0_VA, WE_QUAD_P0_W, WE_QUAD_STATE_SIZE, and linear_kalman_filter::X.
Referenced by wind_estimation_quadrotor_init(), and wind_estimation_quadrotor_start().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 184 of file wind_estimation_quadrotor.c.
References wind_estimation_quadrotor::filter, linear_kalman_filter::Q, wind_estimation_quadrotor_params::Q_va, we_quad, and we_quad_params.
Definition at line 192 of file wind_estimation_quadrotor.c.
References wind_estimation_quadrotor::filter, linear_kalman_filter::Q, wind_estimation_quadrotor_params::Q_w, we_quad, and we_quad_params.
Definition at line 200 of file wind_estimation_quadrotor.c.
References wind_estimation_quadrotor::filter, linear_kalman_filter::R, wind_estimation_quadrotor_params::R, we_quad, and we_quad_params.
Definition at line 178 of file wind_estimation_quadrotor.c.
References wind_estimation_quadrotor::status, we_quad, WE_QUAD_STATUS_RUN, and wind_estimation_quadrotor_reset().
Here is the call graph for this function:Definition at line 169 of file wind_estimation_quadrotor.c.
References foo, stateSetHorizontalWindspeed_f(), wind_estimation_quadrotor::status, we_quad, and WE_QUAD_STATUS_IDLE.
Here is the call graph for this function:
|
static |
Definition at line 77 of file wind_estimation_quadrotor.c.
Referenced by wind_estimation_quadrotor_init().
|
static |
Definition at line 86 of file wind_estimation_quadrotor.c.
Referenced by send_wind(), wind_estimation_quadrotor_init(), wind_estimation_quadrotor_periodic(), wind_estimation_quadrotor_report(), wind_estimation_quadrotor_reset(), wind_estimation_quadrotor_SetQva(), wind_estimation_quadrotor_SetQw(), wind_estimation_quadrotor_SetR(), wind_estimation_quadrotor_start(), and wind_estimation_quadrotor_stop().
| struct wind_estimation_quadrotor_params we_quad_params |
Definition at line 87 of file wind_estimation_quadrotor.c.
Referenced by wind_estimation_quadrotor_init(), wind_estimation_quadrotor_SetQva(), wind_estimation_quadrotor_SetQw(), and wind_estimation_quadrotor_SetR().