|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h" Include dependency graph for linear_kalman_filter.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for linear_kalman_filter.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | linear_kalman_filter |
Macros | |
| #define | KF_MAX_STATE_SIZE 6 |
| #define | KF_MAX_CMD_SIZE 2 |
| #define | KF_MAX_MEAS_SIZE 6 |
Functions | |
| bool | linear_kalman_filter_init (struct linear_kalman_filter *filter, uint8_t n, uint8_t c, uint8_t m) |
| Init all matrix and vectors to zero. | |
| void | linear_kalman_filter_predict (struct linear_kalman_filter *filter, float *U) |
| Prediction step. | |
| void | linear_kalman_filter_update (struct linear_kalman_filter *filter, float *Y) |
| Update step. | |
| struct linear_kalman_filter |
Definition at line 46 of file linear_kalman_filter.h.
| Data Fields | ||
|---|---|---|
| float | A[KF_MAX_STATE_SIZE][KF_MAX_STATE_SIZE] | dynamic matrix |
| float | B[KF_MAX_STATE_SIZE][KF_MAX_CMD_SIZE] | command matrix |
| float | C[KF_MAX_MEAS_SIZE][KF_MAX_STATE_SIZE] | observation matrix |
| uint8_t | c | command vector size (<= KF_MAX_CMD_SIZE) |
| uint8_t | m | measurement vector size (<= KF_MAX_MEAS_SIZE) |
| uint8_t | n | state vector size (<= KF_MAX_STATE_SIZE) |
| float | P[KF_MAX_STATE_SIZE][KF_MAX_STATE_SIZE] | state covariance matrix |
| float | Q[KF_MAX_STATE_SIZE][KF_MAX_STATE_SIZE] | proces covariance noise |
| float | R[KF_MAX_MEAS_SIZE][KF_MAX_MEAS_SIZE] | measurement covariance noise |
| float | X[KF_MAX_STATE_SIZE] | estimated state X |
| #define KF_MAX_CMD_SIZE 2 |
Definition at line 38 of file linear_kalman_filter.h.
| #define KF_MAX_MEAS_SIZE 6 |
Definition at line 43 of file linear_kalman_filter.h.
| #define KF_MAX_STATE_SIZE 6 |
Definition at line 33 of file linear_kalman_filter.h.
|
extern |
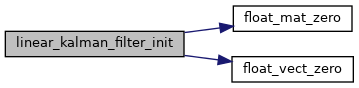
Init all matrix and vectors to zero.
| filter | pointer to a filter structure |
| n | size of the state vector |
| c | size of the command vector |
| m | size of the measurement vector |
Definition at line 38 of file linear_kalman_filter.c.
References linear_kalman_filter::A, linear_kalman_filter::B, linear_kalman_filter::C, linear_kalman_filter::c, float_mat_zero(), float_vect_zero(), foo, KF_MAX_CMD_SIZE, KF_MAX_MEAS_SIZE, KF_MAX_STATE_SIZE, linear_kalman_filter::m, MAKE_MATRIX_PTR, linear_kalman_filter::n, linear_kalman_filter::P, linear_kalman_filter::Q, linear_kalman_filter::R, and linear_kalman_filter::X.
Referenced by wind_estimation_quadrotor_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
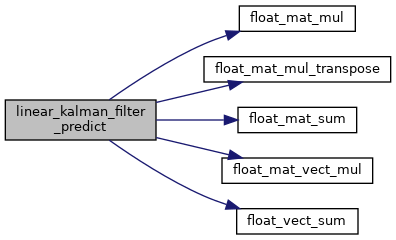
Prediction step.
X = Ad * X + Bd * U P = Ad * P * Ad' + Q
| filter | pointer to the filter structure |
| U | command vector |
Definition at line 78 of file linear_kalman_filter.c.
References linear_kalman_filter::A, linear_kalman_filter::B, linear_kalman_filter::c, float_mat_mul(), float_mat_mul_transpose(), float_mat_sum(), float_mat_vect_mul(), float_vect_sum(), foo, MAKE_MATRIX_PTR, linear_kalman_filter::n, linear_kalman_filter::P, linear_kalman_filter::Q, and linear_kalman_filter::X.
Referenced by wind_estimation_quadrotor_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
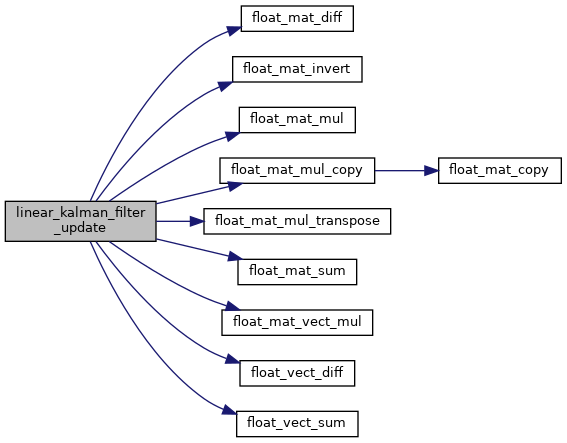
Update step.
S = Cd * P * Cd' + R K = P * Cd' / S X = X + K * (Y - Cd * X) P = P - K * Cd * P
| filter | pointer to the filter structure |
| Y | measurement vector |
Definition at line 111 of file linear_kalman_filter.c.
References linear_kalman_filter::C, float_mat_diff(), float_mat_invert(), float_mat_mul(), float_mat_mul_copy(), float_mat_mul_transpose(), float_mat_sum(), float_mat_vect_mul(), float_vect_diff(), float_vect_sum(), foo, K, linear_kalman_filter::m, MAKE_MATRIX_PTR, linear_kalman_filter::n, linear_kalman_filter::P, linear_kalman_filter::R, and linear_kalman_filter::X.
Referenced by wind_estimation_quadrotor_periodic().
Here is the call graph for this function: Here is the caller graph for this function: