|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
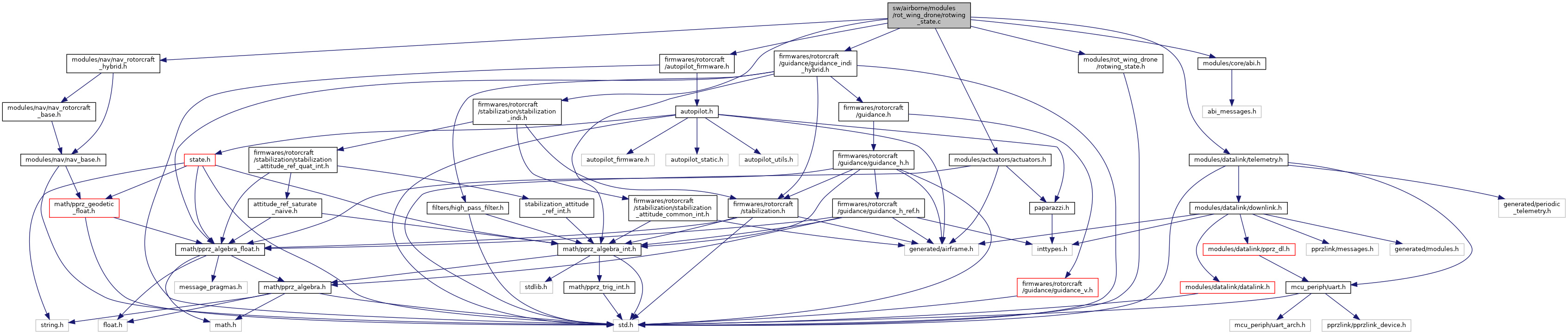
#include "modules/rotwing_drone/rotwing_state.h"#include "firmwares/rotorcraft/autopilot_firmware.h"#include "modules/core/commands.h"#include "modules/actuators/actuators.h"#include "modules/core/abi.h"#include "modules/datalink/telemetry.h" Include dependency graph for rotwing_state.c:
Include dependency graph for rotwing_state.c:Go to the source code of this file.
Functions | |
| static void | rotwing_state_feedback_cb (uint8_t sender_id, struct act_feedback_t *feedback_msg, uint8_t num_act) |
| static void | send_rotating_wing_state (struct transport_tx *trans, struct link_device *dev) |
| void | rotwing_state_init (void) |
| bool | rotwing_state_hover_motors_idling (void) |
| Check if hover motors are idling (COMMAND_THRUST < ROTWING_QUAD_IDLE_MIN_THRUST) for ROTWING_QUAD_IDLE_TIMEOUT time. | |
| void | rotwing_state_periodic (void) |
| static void | rotwing_state_feedback_cb (uint8_t sender_id, struct act_feedback_t UNUSED *feedback_msg, uint8_t UNUSED num_act_message) |
| bool | rotwing_state_hover_motors_running (void) |
| bool | rotwing_state_pusher_motor_running (void) |
| bool | rotwing_state_skew_angle_valid (void) |
| void | rotwing_state_set (enum rotwing_states_t state) |
| bool | rotwing_state_choose_circle_direction (uint8_t wp_id) |
| bool | rotwing_state_choose_state_by_dist (uint8_t wp_id) |
Variables | |
| abi_event | rotwing_state_feedback_ev |
| struct rotwing_state_t | rotwing_state |
| #define ROTWING_FW_SKEW_ANGLE 85.0 |
Definition at line 60 of file rotwing_state.c.
| #define ROTWING_FW_STALL_TIMEOUT 0.5 |
Definition at line 100 of file rotwing_state.c.
| #define ROTWING_MIN_AIRSPEED_SLOPE_START_ANGLE 30.0 |
Definition at line 95 of file rotwing_state.c.
| #define ROTWING_PUSH_MIN_RPM 300 |
Definition at line 40 of file rotwing_state.c.
| #define ROTWING_QUAD_IDLE_MIN_THRUST 100 |
Definition at line 50 of file rotwing_state.c.
| #define ROTWING_QUAD_IDLE_TIMEOUT 0.4 |
Definition at line 55 of file rotwing_state.c.
| #define ROTWING_QUAD_MIN_RPM 400 |
Definition at line 35 of file rotwing_state.c.
| #define ROTWING_QUAD_SKEW_ANGLE 25.0 |
Definition at line 65 of file rotwing_state.c.
| #define ROTWING_RPM_TIMEOUT 1.0 |
Definition at line 45 of file rotwing_state.c.
| #define ROTWING_SKEW_BACK_MARGIN 5.0 |
Definition at line 85 of file rotwing_state.c.
Definition at line 90 of file rotwing_state.c.
| #define ROTWING_STATE_ACT_FEEDBACK_ID ABI_BROADCAST |
ABI binding feedback data.
Definition at line 119 of file rotwing_state.c.
| #define ROTWING_STATE_MIN_FW_DIST 200.0 |
Definition at line 104 of file rotwing_state.c.
Definition at line 70 of file rotwing_state.c.
| #define ROTWING_TRANSITION_MAX_CLIMB_SPEED 0.5 |
Definition at line 75 of file rotwing_state.c.
| #define ROTWING_TRANSITION_MAX_DESCEND_SPEED -0.5 |
Definition at line 80 of file rotwing_state.c.
| #define SERVO_BMOTOR_PUSH_IDX SERVO_MOTOR_PUSH_IDX |
Definition at line 109 of file rotwing_state.c.
| #define SERVO_BROTATION_MECH_IDX SERVO_ROTATION_MECH_IDX |
Definition at line 114 of file rotwing_state.c.
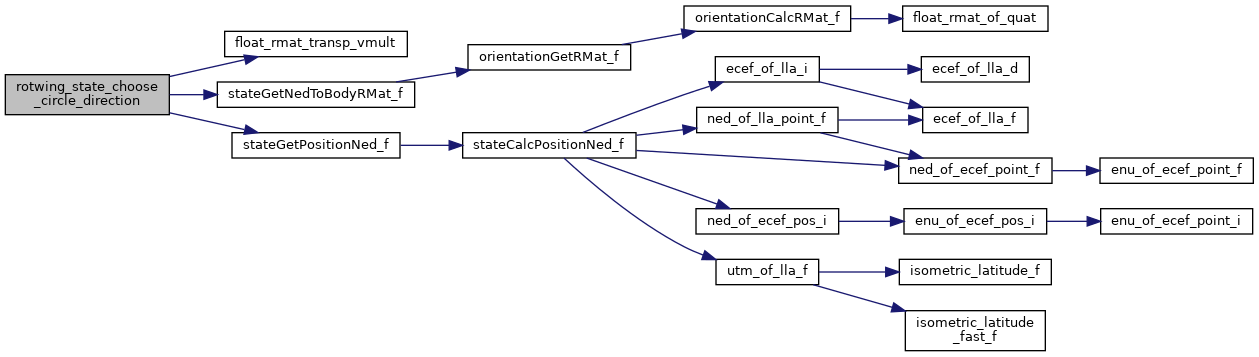
Definition at line 501 of file rotwing_state.c.
References float_rmat_transp_vmult(), foo, stateGetNedToBodyRMat_f(), stateGetPositionNed_f(), VECT3_CROSS_PRODUCT, VECT3_DIFF, VECT3_DOT_PRODUCT, waypoints, FloatVect3::x, NedCoor_f::x, point::x, FloatVect3::y, NedCoor_f::y, point::y, and NedCoor_f::z.
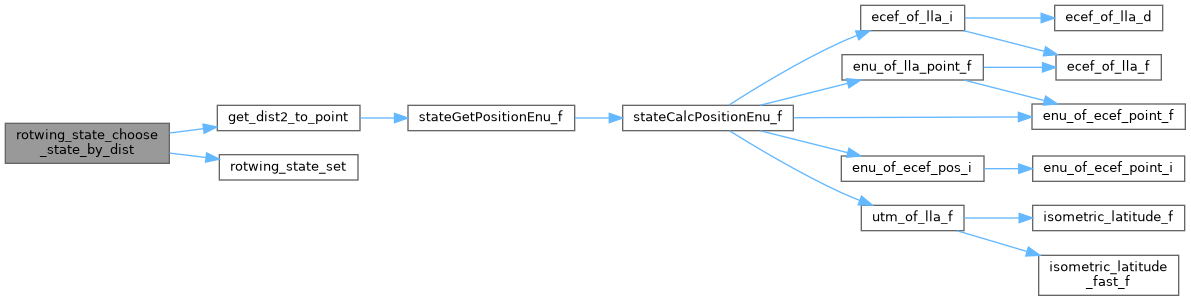
Here is the call graph for this function:Definition at line 536 of file rotwing_state.c.
References AP_MODE_NAV, autopilot, dist2_to_wp, foo, get_dist2_to_point(), pprz_autopilot::mode, ROTWING_STATE_MIN_FW_DIST, ROTWING_STATE_REQUEST_FW, ROTWING_STATE_REQUEST_HOVER, rotwing_state_set(), and waypoints.
Here is the call graph for this function:
|
static |
|
static |
Definition at line 424 of file rotwing_state.c.
References foo, get_sys_time_float(), idx, rotwing_state_t::meas_rpm, rotwing_state_t::meas_rpm_time, rotwing_state_t::meas_skew_angle_deg, rotwing_state_t::meas_skew_angle_time, act_feedback_t::act_feedback_set_t::position, rotwing_state, act_feedback_t::act_feedback_set_t::rpm, SERVO_BMOTOR_PUSH_IDX, SERVO_BROTATION_MECH_IDX, and act_feedback_t::set.
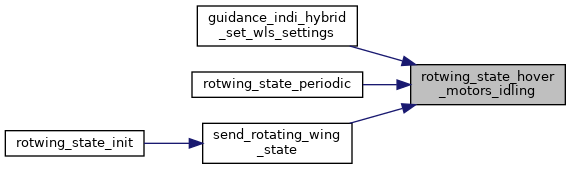
Here is the call graph for this function:Check if hover motors are idling (COMMAND_THRUST < ROTWING_QUAD_IDLE_MIN_THRUST) for ROTWING_QUAD_IDLE_TIMEOUT time.
Definition at line 205 of file rotwing_state.c.
References Stabilization::cmd, foo, get_sys_time_float(), ROTWING_QUAD_IDLE_MIN_THRUST, ROTWING_QUAD_IDLE_TIMEOUT, and stabilization.
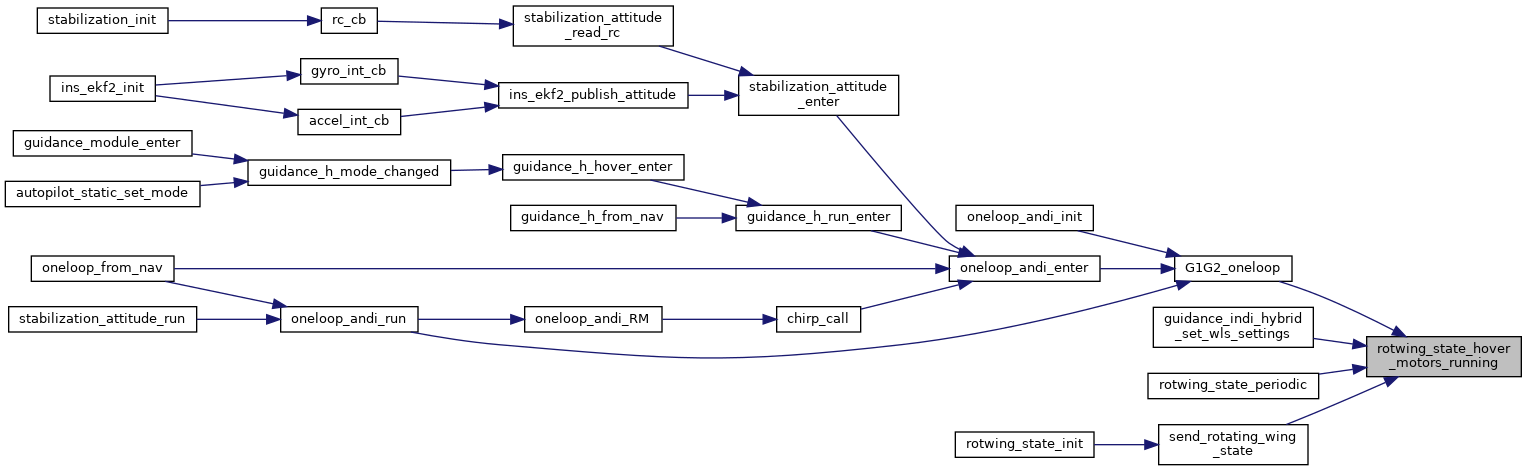
Referenced by guidance_indi_hybrid_set_wls_settings(), rotwing_state_periodic(), and send_rotating_wing_state().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 461 of file rotwing_state.c.
References foo, get_sys_time_float(), rotwing_state_t::meas_rpm, rotwing_state_t::meas_rpm_time, ROTWING_QUAD_MIN_RPM, ROTWING_RPM_TIMEOUT, and rotwing_state.
Referenced by compute_accel_from_speed_sp(), G1G2_oneloop(), guidance_indi_hybrid_set_wls_settings(), rotwing_state_periodic(), and send_rotating_wing_state().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 167 of file rotwing_state.c.
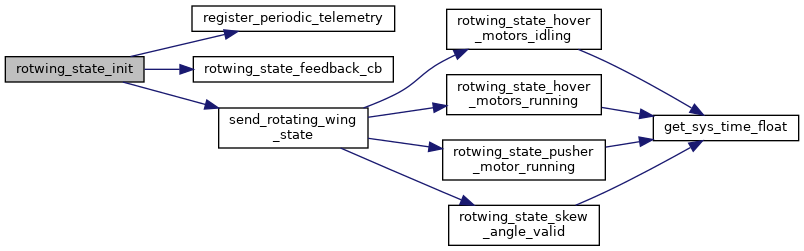
References rotwing_state_t::cruise_airspeed, DefaultPeriodic, rotwing_state_t::fail_hover_motor, rotwing_state_t::fail_pusher_motor, rotwing_state_t::fail_skew_angle, foo, rotwing_state_t::force_skew, rotwing_state_t::fw_min_airspeed, rotwing_state_t::hover_motors_enabled, rotwing_state_t::meas_rpm, rotwing_state_t::meas_rpm_time, rotwing_state_t::meas_skew_angle_deg, rotwing_state_t::meas_skew_angle_time, rotwing_state_t::nav_state, preflight_check_register(), rotwing_state_t::ref_model_skew_angle_deg, register_periodic_telemetry(), rotwing_state, ROTWING_STATE_ACT_FEEDBACK_ID, rotwing_state_feedback_cb(), rotwing_state_feedback_ev, ROTWING_STATE_FORCE_HOVER, send_rotating_wing_state(), rotwing_state_t::skew_cmd, rotwing_state_t::sp_skew_angle_deg, and rotwing_state_t::state.
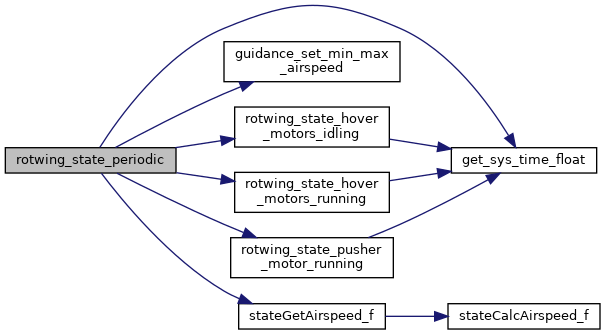
Here is the call graph for this function:Definition at line 219 of file rotwing_state.c.
References ACT_FEEDBACK_BOARD_ID, actuators_pprz, AP_MODE_FAILSAFE, Stabilization::att_submode, autopilot, commands, rotwing_state_t::cruise_airspeed, rotwing_state_t::fail_hover_motor, rotwing_state_t::fail_pusher_motor, rotwing_state_t::fail_skew_angle, foo, rotwing_state_t::force_skew, rotwing_state_t::fw_min_airspeed, get_sys_time_float(), gi_unbounded_airspeed_sp, guidance_h, GUIDANCE_H_MAX_BANK, GUIDANCE_H_MODE_NONE, GUIDANCE_INDI_FWD_CLIMB_SPEED, GUIDANCE_INDI_FWD_DESCEND_SPEED, GUIDANCE_INDI_QUAD_CLIMB_SPEED, GUIDANCE_INDI_QUAD_DESCEND_SPEED, guidance_set_max_bank_angle(), guidance_set_max_climb_speed(), guidance_set_max_descend_speed(), guidance_set_min_max_airspeed(), rotwing_state_t::hover_motors_enabled, act_feedback_t::idx, rotwing_state_t::max_airspeed, MAX_PPRZ, rotwing_state_t::meas_rpm, rotwing_state_t::meas_rpm_time, rotwing_state_t::meas_skew_angle_deg, rotwing_state_t::min_airspeed, pprz_autopilot::mode, HorizontalGuidance::mode, Stabilization::mode, nav_max_deceleration_sp, rotwing_state_t::nav_state, act_feedback_t::act_feedback_set_t::position, act_feedback_t::position, rotwing_state_t::ref_model_skew_angle_deg, ROTWING_FW_SKEW_ANGLE, ROTWING_FW_STALL_TIMEOUT, ROTWING_MIN_AIRSPEED_SLOPE_START_ANGLE, ROTWING_PUSH_MIN_RPM, ROTWING_QUAD_MIN_RPM, ROTWING_QUAD_SKEW_ANGLE, ROTWING_SKEW_ANGLE_STEP, ROTWING_SKEW_BACK_MARGIN, rotwing_state, ROTWING_STATE_FORCE_FW, ROTWING_STATE_FORCE_HOVER, ROTWING_STATE_FREE, rotwing_state_hover_motors_idling(), rotwing_state_hover_motors_running(), rotwing_state_pusher_motor_running(), ROTWING_STATE_REQUEST_FW, ROTWING_STATE_REQUEST_HOVER, ROTWING_TRANSITION_MAX_BANK, ROTWING_TRANSITION_MAX_CLIMB_SPEED, ROTWING_TRANSITION_MAX_DESCEND_SPEED, act_feedback_t::set, rotwing_state_t::skew_cmd, rotwing_state_t::sp_skew_angle_deg, speed_sp, stabilization, STABILIZATION_ATT_SUBMODE_FORWARD, STABILIZATION_MODE_ATTITUDE, STABILIZATION_MODE_NONE, rotwing_state_t::state, and stateGetAirspeed_f().
Here is the call graph for this function:Definition at line 478 of file rotwing_state.c.
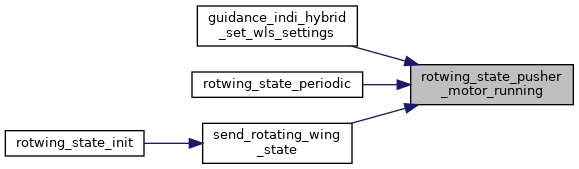
References get_sys_time_float(), rotwing_state_t::meas_rpm, rotwing_state_t::meas_rpm_time, ROTWING_PUSH_MIN_RPM, ROTWING_RPM_TIMEOUT, and rotwing_state.
Referenced by compute_accel_from_speed_sp(), guidance_indi_hybrid_set_wls_settings(), rotwing_state_periodic(), and send_rotating_wing_state().
Here is the call graph for this function: Here is the caller graph for this function:| void rotwing_state_set | ( | enum rotwing_states_t | state | ) |
Definition at line 495 of file rotwing_state.c.
References rotwing_state_t::nav_state, rotwing_state, and state.
Referenced by rotwing_state_choose_state_by_dist().
Here is the caller graph for this function:Definition at line 487 of file rotwing_state.c.
References foo, get_sys_time_float(), rotwing_state_t::meas_skew_angle_deg, rotwing_state_t::meas_skew_angle_time, rotwing_state_t::ref_model_skew_angle_deg, ROTWING_RPM_TIMEOUT, ROTWING_SKEW_REF_MODEL_MAX_DIFF, and rotwing_state.
Referenced by send_rotating_wing_state().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 126 of file rotwing_state.c.
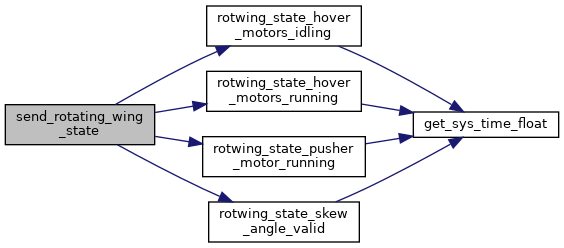
References dev, foo, rotwing_state_t::force_skew, gi_unbounded_airspeed_sp, rotwing_state_t::hover_motors_enabled, rotwing_state_t::max_airspeed, rotwing_state_t::meas_skew_angle_deg, rotwing_state_t::min_airspeed, rotwing_state_t::nav_state, rotwing_state, rotwing_state_hover_motors_idling(), rotwing_state_hover_motors_running(), rotwing_state_pusher_motor_running(), rotwing_state_skew_angle_valid(), rotwing_state_t::sp_skew_angle_deg, rotwing_state_t::state, state, status, and rotwing_bitmask_t::value.
Referenced by rotwing_state_init().
Here is the call graph for this function: Here is the caller graph for this function:| struct rotwing_state_t rotwing_state |
Definition at line 123 of file rotwing_state.c.
Referenced by G1G2_oneloop(), guidance_indi_hybrid_set_wls_settings(), oneloop_andi_run(), rotwing_state_feedback_cb(), rotwing_state_hover_motors_running(), rotwing_state_init(), rotwing_state_periodic(), rotwing_state_pusher_motor_running(), rotwing_state_set(), rotwing_state_skew_angle_valid(), and send_rotating_wing_state().
| abi_event rotwing_state_feedback_ev |
Definition at line 121 of file rotwing_state.c.
Referenced by rotwing_state_init().