|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
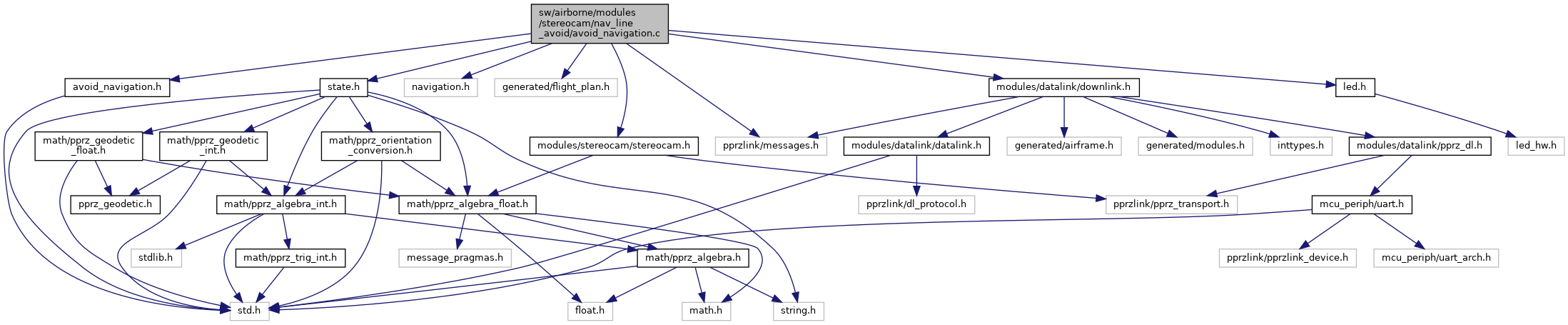
#include "avoid_navigation.h"#include "state.h"#include "navigation.h"#include "generated/flight_plan.h"#include "modules/stereocam/stereocam.h"#include "pprzlink/messages.h"#include "modules/datalink/downlink.h"#include "led.h" Include dependency graph for avoid_navigation.c:
Include dependency graph for avoid_navigation.c:Go to the source code of this file.
Macros | |
| #define | DOWNLINK_DEVICE DOWNLINK_AP_DEVICE |
Functions | |
| void | init_avoid_navigation () |
| void | run_avoid_navigation_onvision (void) |
| void | increase_nav_heading (float *heading, float increment) |
Variables | |
| struct AvoidNavigationStruct | avoid_navigation_data |
| global VIDEO state | |
| bool | obstacle_detected = false |
| int32_t | counter = 0 |
| #define DOWNLINK_DEVICE DOWNLINK_AP_DEVICE |
Definition at line 45 of file avoid_navigation.c.
Definition at line 117 of file avoid_navigation.c.
Definition at line 58 of file avoid_navigation.c.
References avoid_navigation_data, and AvoidNavigationStruct::mode.
Referenced by stereo_avoid_init().
Here is the caller graph for this function:Definition at line 65 of file avoid_navigation.c.
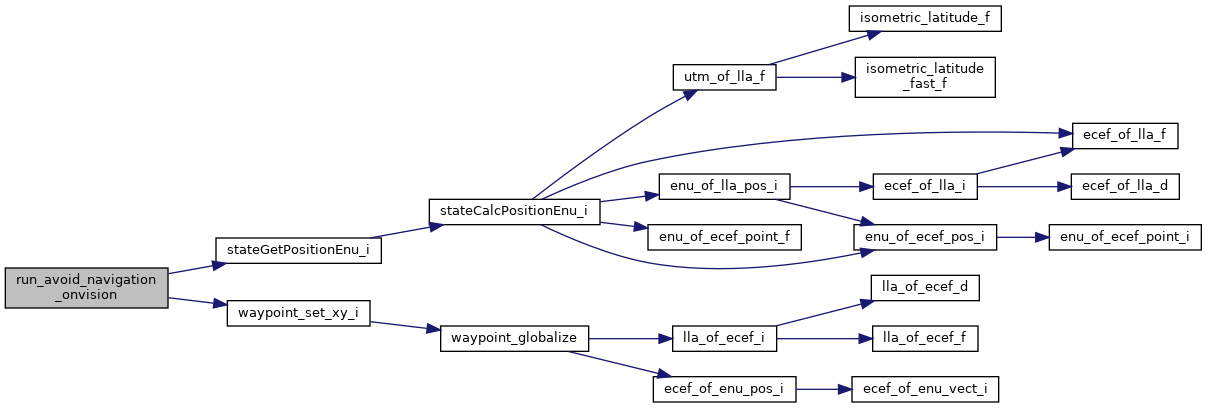
References avoid_navigation_data, counter, DefaultChannel, DefaultDevice, foo, RotorcraftNavigation::heading, AvoidNavigationStruct::mode, nav, NAV_LINE_AVOID_SEGMENT_LENGTH, obstacle_detected, POS_BFP_OF_REAL, stateGetPositionEnu_i(), AvoidNavigationStruct::stereo_bin, waypoint_set_xy_i(), EnuCoor_i::x, EnuCoor_i::y, and EnuCoor_i::z.
Referenced by stereo_avoid_run().
Here is the call graph for this function: Here is the caller graph for this function:| struct AvoidNavigationStruct avoid_navigation_data |
global VIDEO state
Definition at line 53 of file avoid_navigation.c.
Referenced by init_avoid_navigation(), and run_avoid_navigation_onvision().
| int32_t counter = 0 |
Definition at line 55 of file avoid_navigation.c.
Referenced by run_avoid_navigation_onvision().
Definition at line 54 of file avoid_navigation.c.
Referenced by run_avoid_navigation_onvision(), and stereocam_droplet_periodic().